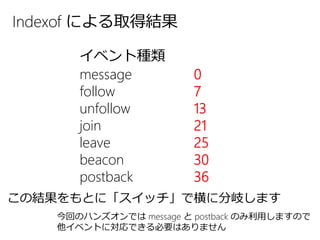
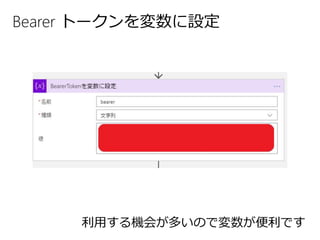
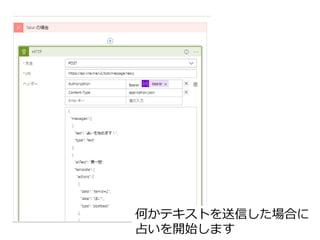
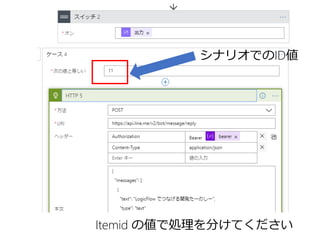
プラン APIリクエスト回数の制限 メッセージ受信者数の制限
DeveloperTrial 1,000/分 20,000/分
その他のプラン 10,000/分 200,000/分
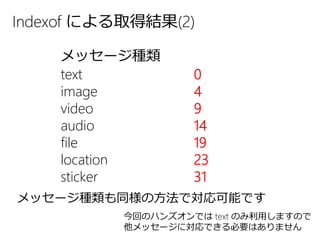
ステータスコード 説明
200 OK リクエストが成功しました。
400 Bad Request リクエストに問題があります。
401 Unauthorized 有効なチャネルアクセストークンが指定されていません。
403 Forbidden APIを使用する権限がありません。ご契約中のプランやアカウントに付与され
ている権限を確認してください。
429 Too Many Requests APIコールのレート制限を超過しました。
500 Internal Server Error 内部サーバーのエラーです。
87.
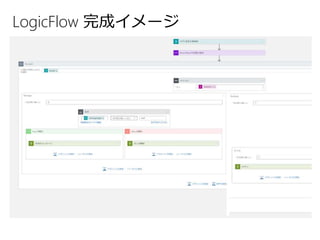
メッセージ 説明
The requestbody has X error(s) リクエストボディのJSONデータにエラーがありました。Xの部分に
エラーの数が表示されます。詳細はdetails[].messageおよび
details[].propertyフィールドに含まれます。
Invalid reply token 応答メッセージで使用された応答トークンが無効です。
The property, XXX, in the request body is
invalid (line: XXX, column: XXX)
リクエストボディに無効なプロパティが指定されていました。XXX
の部分に具体的な行と列が表示されます。
The request body could not be parsed
as JSON (line: XXX, column: XXX)
リクエストボディのJSONデータを解析できませんでした。XXXの部
分に具体的な行と列が表示されます。
The content type, XXX, is not supported APIでサポートされていないコンテンツタイプがリクエストされま
した。
Authentication failed due to the
following reason: XXX
APIが呼び出されたときに認証に失敗しました。XXXの部分に理由が
表示されます。
Access to this API is not available for
your account
実行権限がないAPIを呼び出しました。
Failed to send messages メッセージの送信に失敗しました。指定したユーザーIDが存在しな
い場合などにこのエラーが発生します。











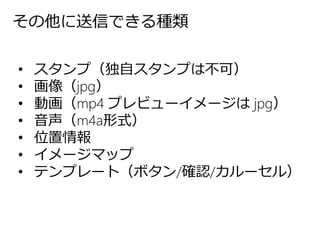
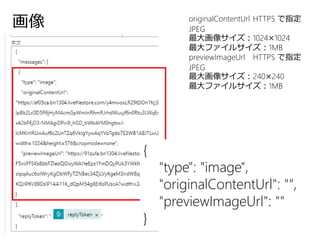
![HTTP アクションの設定(4)
items('Apply_to_each')?['message']?['text']](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-30-320.jpg)





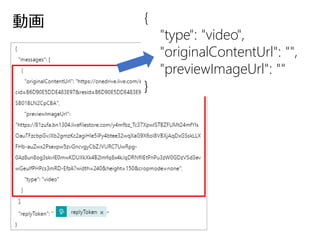
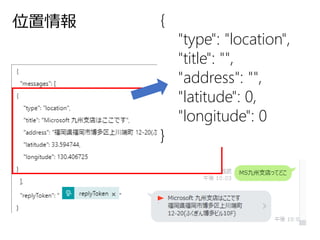

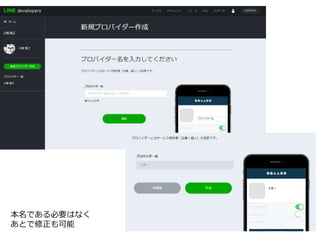
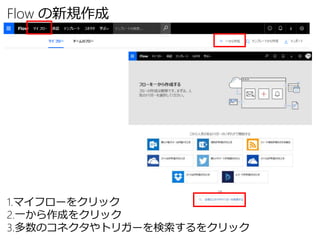
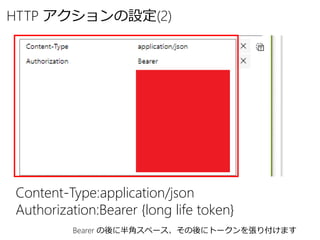
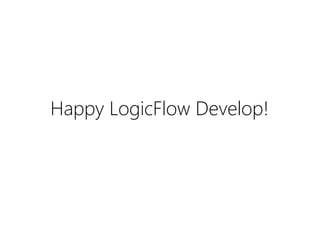
![イメージマップ
{
"type": "imagemap",
"baseUrl": "",
"altText": "クラウディアさんとななみ",
"baseSize": {
"height": 1040,
"width": 1040
},
"actions": [
{
"type": "message",
"text": "クラウディアさんお疲れ様でした!",
"area": {
"x": 183,
"y": 5,
"width": 220,
"height": 540
}
}
]
} スマホ版のみで利用できます](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-47-320.jpg)
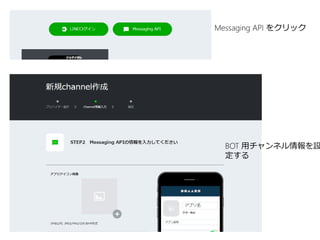
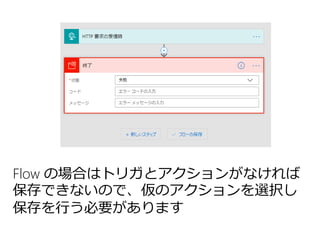
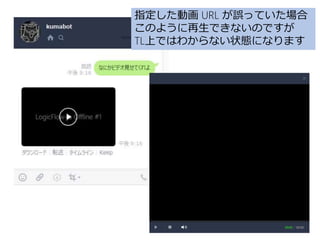
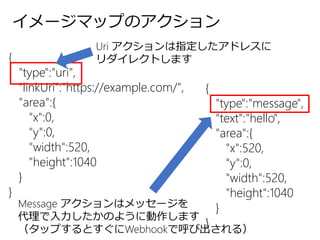
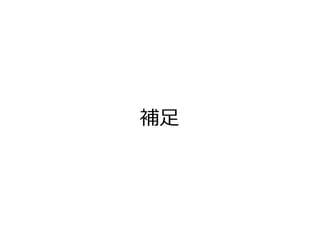
!["actions": [
{
"type": "message",
"text": "クラウディアさんお疲れ様でした!",
"area": {
"x": 183,
"y": 5,
"width": 220,
"height": 540
}
}
]
画像の指定した領域をクリックすると
Actions で定義した動作を実行します](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-48-320.jpg)
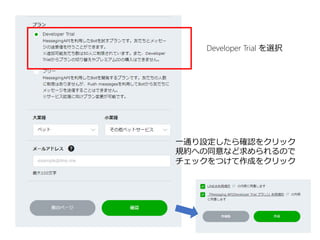
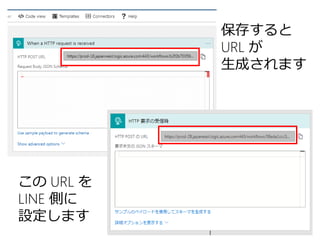
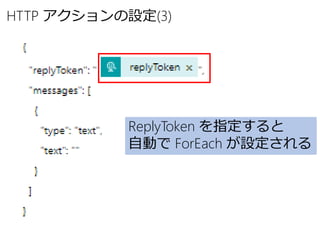
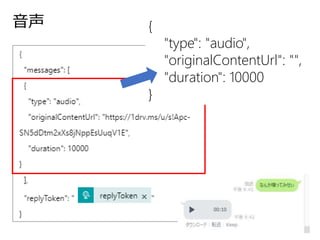
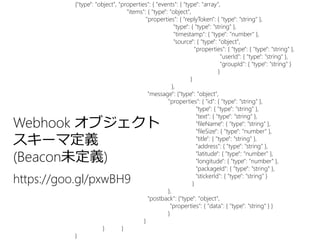
![イメージマップの画像サイズ
{
"type": "imagemap",
"baseUrl": "",
"altText": "クラウディアさんとななみ",
"baseSize": {
"height": 520,
"width": 1040
},
画像は
[ baseUrl ] / [ デバイスから要求する画像サイズ ]
でアクセスする仕様なので、サイズにあった画像をあらかじめ
同一ディレクトリに用意しておくのがよいです
利用される画像サイズ 240px / 300px / 460px / 700px / 1040px](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-50-320.jpg)
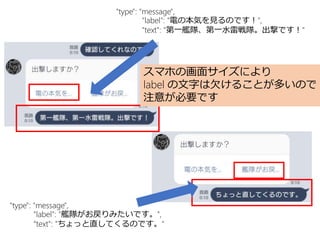
![テンプレート(確認)
{
"type": "template",
"altText": "確認なのです!",
"template": {
"type": "confirm",
"text": "出撃しますか?",
"actions": [
{
"type": "message",
"label": "電の本気を見るのです!",
"text": "第一艦隊、第一水雷戦隊。出撃です!"
},
{
"type": "message",
"label": "艦隊がお戻りみたいです。",
"text": "ちょっと直してくるのです。"
}
]
}
}](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-51-320.jpg)
![テンプレート(ボタン)
{
"type": "template",
“altText”: “テンプレートのサンプル",
"template": {
"type": "buttons",
"thumbnailImageUrl": "
https://lfjabot.blob.core.windows.net/images
/logicflowja_logo.png",
"title": "Menu",
"text": "LogicFlow といえば",
"actions": [
{"type": "postback",
"label": "LogicApps",
"data": "action=buy&itemid=123" },
{"type": "postback",
"label": "MS Flow",
"data": "action=add&itemid=123" },
{"type": "uri",
"label": "WF",
"uri": "http://blogahf.blogspot.jp/" }
]](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-53-320.jpg)

![テンプレート(カルーセル)
{"type": "template",
"altText": "カルーセルのサンプルです",
"template": {"type": "carousel",
"columns": [
{"thumbnailImageUrl":
"https://lfjabot.blob.core.windows.net/images/rabbit.jpg",
"title": "メニュー1",
"text": "はむはむむしゃむしゃ",
"actions": [
{"type": "postback",
"label": "飼う",
"data": "action=keep&itemid=1" },
{"type": "postback",
"label": "野に放つ",
"data": "action=remove&itemid=1" }
]
},
{ (別カラムの設定)}
]
}
}](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-55-320.jpg)
![{"thumbnailImageUrl":
"https://lfjabot.blob.core.windows.net/images/rabbit.J
PG",
"title": "メニュー1",
"text": “description",
"actions": [
{"type": "postback",
"label": "飼う",
"data": "action=keep&itemid=1" },
{"type": "postback",
"label": "野に放つ",
"data": "action=remove&itemid=1" }
]
},
カルーセルのカラムは 10 個まで
カラムのアクションは 3 個まで
(すべてのカラムでアクション個数は統一)](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-56-320.jpg)
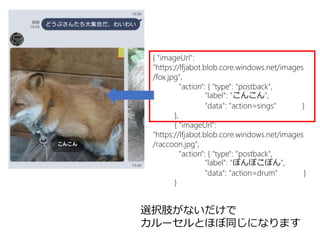
![テンプレート(画像カルーセル)
{
"type": "template",
"altText": "画像カルーセルのサンプル",
"template": {
"type": "image_carousel",
"columns": [
{ "imageUrl": "https://lfjabot.blob.core.windows.net/images/fox.jpg",
"action": { "type": "postback",
"label": "こんこん",
"data": "action=sings" }
},
{ "imageUrl":
"https://lfjabot.blob.core.windows.net/images/raccoon.jpg",
"action": { "type": "postback",
"label": "ぽんぽこぽん",
"data": "action=drum" }
}
]
}
}](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-57-320.jpg)
![concat('https://api.line.me/v2/bot/message/’,
items('For_each')?['message']?['id’],
'/content')
取得用の URI 作成](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-61-320.jpg)

![今回はプログラム的な
発想で対処します
本来は LogicFlow ではなく
外部処理で行うのが適して
いる箇所です
indexof('messagefollowunfollowjoinleavebeaconpostback’,
items('For_each')?['type'])](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-69-320.jpg)
![indexof(
'messagefollowunfollowjoinleavebeaconpostback’,
items('For_each')?['type'])
ある文字列の中から指定した文字列が
何桁目から始まっているかを取得する関数
LINE から渡されるイベント種別を
結合した文字列
実際に LINE から
渡されるイベント種別](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-70-320.jpg)
![indexof('messagepostback’,
items('For_each')?['type'])](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-76-320.jpg)
![items(‘For_each')?['message']?[‘type']](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-77-320.jpg)
![replace(
string(items('For_each')?['postback']?['data’]),
‘itemid=‘,
'')
一つにまとめても大丈夫です](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-79-320.jpg)

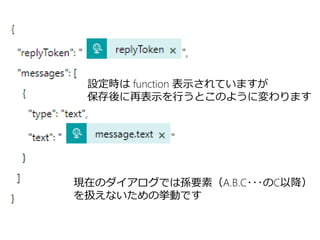
![メッセージ 説明
The request body has X error(s) リクエストボディのJSONデータにエラーがありました。Xの部分に
エラーの数が表示されます。詳細はdetails[].messageおよび
details[].propertyフィールドに含まれます。
Invalid reply token 応答メッセージで使用された応答トークンが無効です。
The property, XXX, in the request body is
invalid (line: XXX, column: XXX)
リクエストボディに無効なプロパティが指定されていました。XXX
の部分に具体的な行と列が表示されます。
The request body could not be parsed
as JSON (line: XXX, column: XXX)
リクエストボディのJSONデータを解析できませんでした。XXXの部
分に具体的な行と列が表示されます。
The content type, XXX, is not supported APIでサポートされていないコンテンツタイプがリクエストされま
した。
Authentication failed due to the
following reason: XXX
APIが呼び出されたときに認証に失敗しました。XXXの部分に理由が
表示されます。
Access to this API is not available for
your account
実行権限がないAPIを呼び出しました。
Failed to send messages メッセージの送信に失敗しました。指定したユーザーIDが存在しな
い場合などにこのエラーが発生します。](https://image.slidesharecdn.com/20171118handsonlinebot-171126105358/85/Develop-LINE_BOT-with-LogicFlow-87-320.jpg)

















![【JAWS-UG Shimane vol.5 】[ハンズオン]サーバーレスで作るチャットBot](https://cdn.slidesharecdn.com/ss_thumbnails/20160604awshandson-160607034637-thumbnail.jpg?width=640&height=640&fit=bounds)



























