Download to read offline

![Credits
• This talk is based on our latest work reported in the following
paper:
– Zhe Tang, Sihao Li, Zichen Huang, Guandong Yang, Kyeong Soo Kim,
and Jeremy S. Smith, “SGP-RI: A Real-Time-Trainable and
Decentralized IoT Indoor Localization Model Based on Sparse
Gaussian Process with Reduced-Dimensional Inputs,” submitted to
IEEE Internet of Things Journal, Aug. 22, 2024. [Online]. Available:
https://arxiv.org/abs/2409.00078
1](https://image.slidesharecdn.com/icacte2024sgp-ri-240915120204-f1f9dafc/85/Decentralized-Indoor-Localization-Framework-Based-on-Real-Time-Trainable-Models-Running-on-IoT-Devices-2-320.jpg)
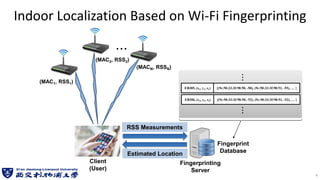

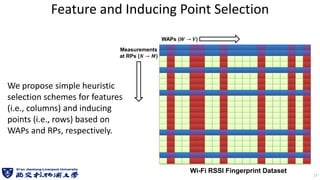
![Results Based on GPU Server and XJTLU
Dynamic Database
Model 2D Error [m] Training Time [s] Model Sparsity
GP 5.32 12.79 ⎯
SGP-RI 5.80 6.08 50%
SGP-RI 5.96 5.52 40%
SGP-RI 6.44 5.00 30%
DNN 5.86 17.181 ⎯
CNN 5.87 12.061 ⎯
RF2 7.00 1.11 ⎯
k-NN3 7.12 0.07 ⎯
19
1. GPU enabled.
2. Random forest.
3. k-nearest neighbors.](https://image.slidesharecdn.com/icacte2024sgp-ri-240915120204-f1f9dafc/85/Decentralized-Indoor-Localization-Framework-Based-on-Real-Time-Trainable-Models-Running-on-IoT-Devices-16-320.jpg)
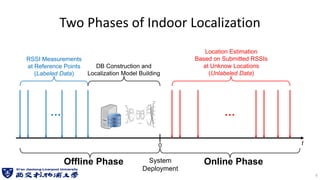
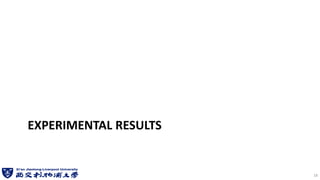
![Results Based on Raspberry Pi 4B and XJTLU
Dynamic Database
Model 2D Error [m] Training Time [s] Model Sparsity
GP* 5.44 96.34 ⎯
SGP-RI 5.84 24.03 50%
SGP-RI 5.96 20.45 40%
SGP-RI 6.50 18.20 30%
RF 7.08 2.62 ⎯
k-NN 7.10 1.17 ⎯
20
* At least 64 GB of storage and active cooling are required for successful completion.](https://image.slidesharecdn.com/icacte2024sgp-ri-240915120204-f1f9dafc/85/Decentralized-Indoor-Localization-Framework-Based-on-Real-Time-Trainable-Models-Running-on-IoT-Devices-17-320.jpg)
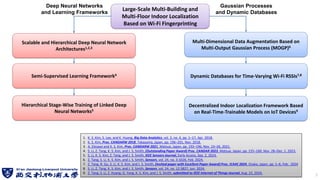
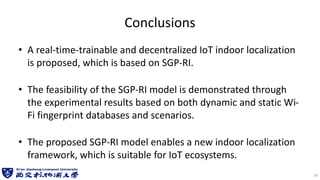
![2D Errors under Dynamic Localization Scenario
Model 2D Error for Each Test Period [m]
1—5 6—10 11—15 16—20
DNN 5.58 5.77 5.96 6.12
CNN 5.72 5.82 6.05 5.89
SGP-RI 5.46 5.42 5.64 5.80
RF 6.76 6.66 6.81 6.82
k-NN 6.88 6.68 6.90 7.07
21](https://image.slidesharecdn.com/icacte2024sgp-ri-240915120204-f1f9dafc/85/Decentralized-Indoor-Localization-Framework-Based-on-Real-Time-Trainable-Models-Running-on-IoT-Devices-18-320.jpg)



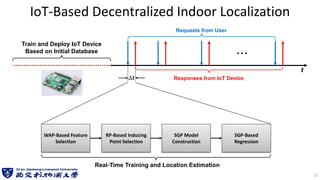
The document presents a decentralized indoor localization framework that utilizes a real-time trainable model based on Sparse Gaussian Processes (SGP) for IoT devices. Experimental results validate the effectiveness of the SGP model in dynamic and static Wi-Fi fingerprint scenarios, showcasing its applicability in IoT ecosystems. The proposed framework demonstrates significant advancements in indoor localization accuracy and efficiency.


















![paper8.pdfiy87t6r5e5wsretdryfugihojp[][poipuoiyutyrtersweaserdtfyguhuijk](https://cdn.slidesharecdn.com/ss_thumbnails/paper8-250429220717-e1d88b07-thumbnail.jpg?width=640&height=640&fit=bounds)