3
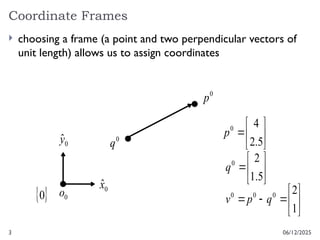
Coordinate Frames
06/12/2025
choosinga frame (a point and two perpendicular vectors of
unit length) allows us to assign coordinates
0
p
0
q
1
2
0
0
0
q
p
v
0
x̂
0
ŷ
0
o
0
5
.
1
2
0
q
5
.
2
4
0
p
4.
4
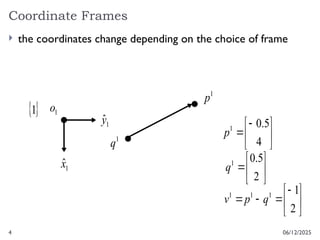
Coordinate Frames
06/12/2025
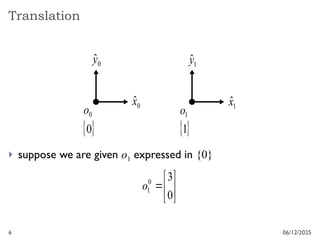
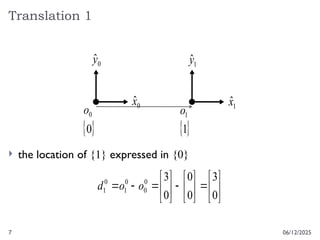
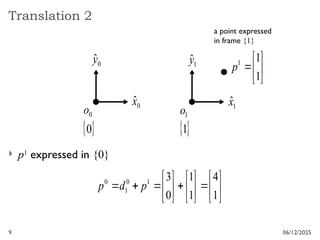
thecoordinates change depending on the choice of frame
1
p
1
q
2
1
1
1
1
q
p
v
1
x̂
1
ŷ
1
o
1
2
5
.
0
1
q
4
5
.
0
1
p
5.
5
Dot Product
06/12/2025
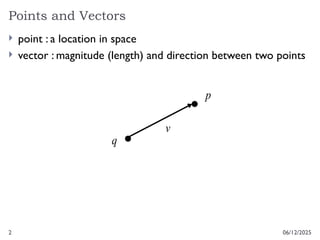
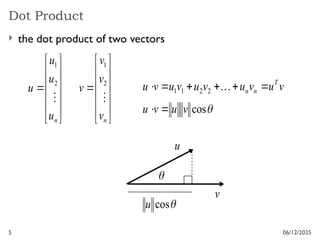
thedot product of two vectors
n
u
u
u
u
2
1
n
v
v
v
v
2
1
v
u
v
u
v
u
v
u
v
u T
n
n
2
2
1
1
u
v
cos
u
cos
v
u
v
u
12
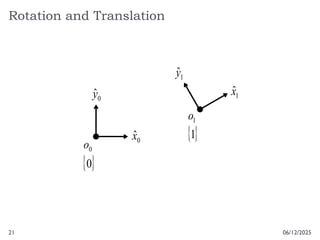
Translation 3
06/12/2025
3. thetranslation vector can be interpreted as an operator
that takes a point and moves it to a new point in the same
frame
d
14
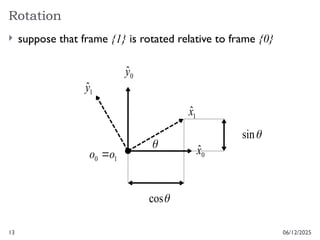
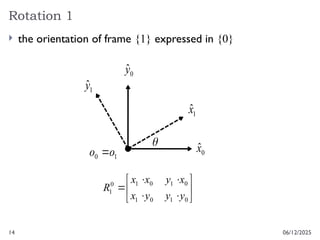
Rotation 1
06/12/2025
theorientation of frame {1} expressed in {0}
1
x̂
1
ŷ
0
x̂
0
ŷ
1
0 o
o
0
1
0
1
0
1
0
1
0
1
y
y
y
x
x
y
x
x
R
15.
15
Rotation 1
06/12/2025
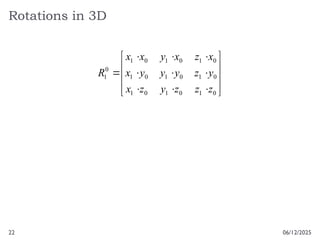
1. therotation matrix can be interpreted as the orientation
of frame {j} expressed in frame {i}
i
j
R
16.
16
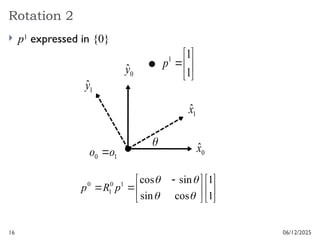
Rotation 2
06/12/2025
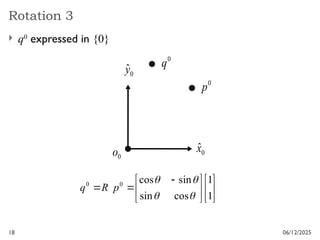
p1
expressedin {0}
1
x̂
1
ŷ
0
x̂
0
ŷ
1
0 o
o
1
1
cos
sin
sin
cos
1
0
1
0
p
R
p
1
1
1
p
17.
17
Rotation 2
06/12/2025
2. therotation matrix can be interpreted as a coordinate
transformation of a point from frame {j} to frame {i}
i
j
R
19
Rotation 3
06/12/2025
3. therotation matrix can be interpreted as an operator
that takes a point and moves it to a new point in the same
frame
R
20.
20
Properties of RotationMatrices
06/12/2025
RT
= R-1
the columns of R are mutually orthogonal
each column of R is a unit vector
det R = 1 (the determinant is equal to 1)