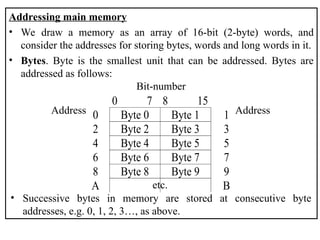
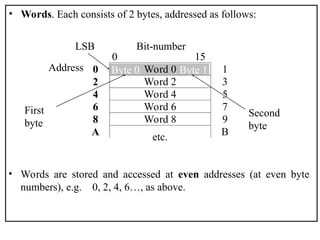
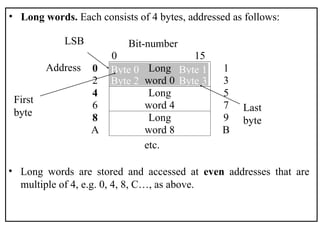
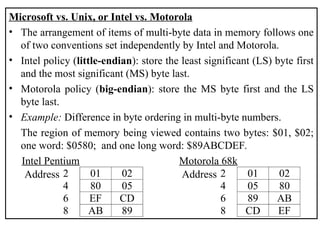
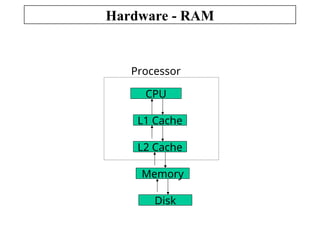
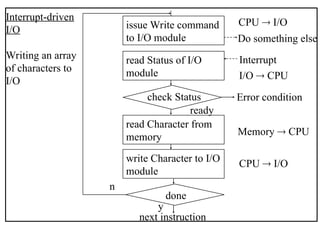
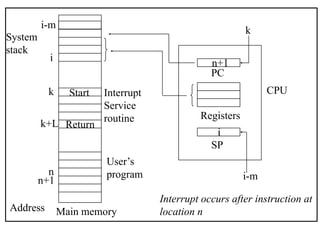
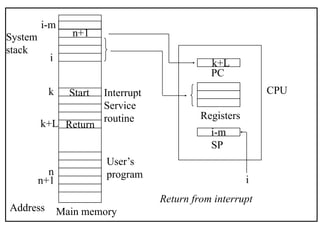
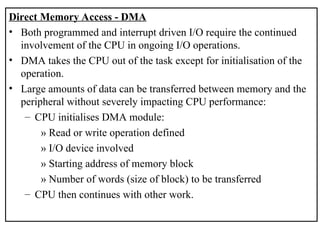
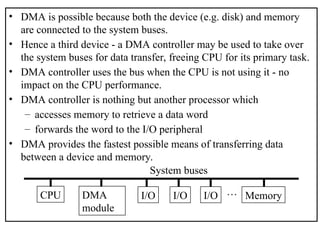
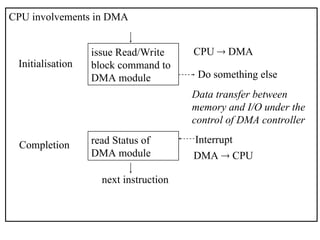
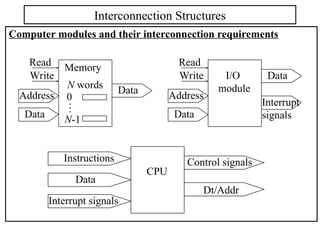
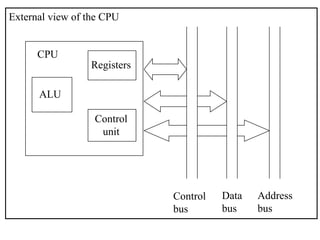
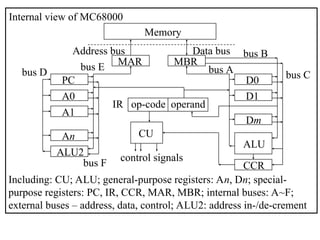
The document outlines the fundamentals of computer architecture, focusing on the CPU, memory hierarchy, and input/output systems. It explains the von Neumann model, organization of the CPU, instruction cycle, various types of registers, and differences between programmed, interrupt-driven, and direct memory access I/O. It also discusses the complexities of cache memory and the implications of hardware vs. microprogrammed control in CPUs.

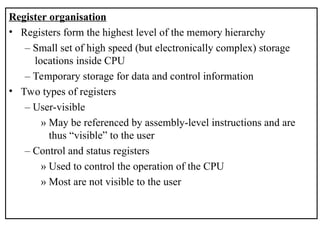
![Register transfer language (RTL)
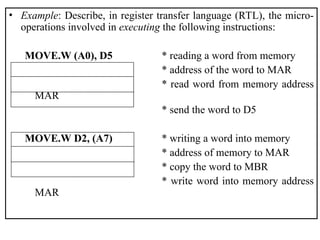
• To describe the details of operation of the CPU, we use a simple
language called RTL. The notations are as follows:
– Reg denotes contents of register Reg; Reg may be, for example,
MAR, MBR, PC, IR, D0, A5, ….
– Mem[x] denotes contents of a memory cell with address x;
sometimes [x].
– Mem[Reg] denotes contents of a memory cell whose address is
given by the contents of register Reg; sometimes [Reg].
– We use to denote transfer of contents: MAR PC means that
the contents of PC are transferred into MAR; PC Mem[x]
means that the contents of address x are transferred into PC; and,
Mem[x] PC means that the contents of PC are stored in
memory address x.](https://image.slidesharecdn.com/session11c-250124070911-38df02c9/85/Data-path-of-Computer-Architecture-ALU-and-other-components-13-320.jpg)
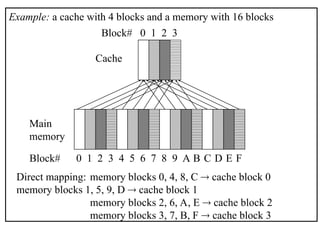
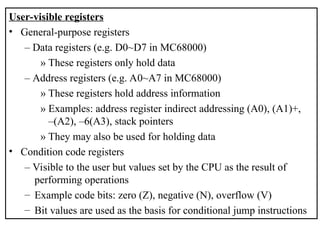
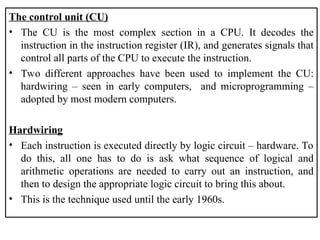
![• Example: In RTL, the fetch-execute cycle for the instruction
ADD.W ($2000), D0 (in MC68000 assembly
language)
i.e. add the contents of memory address $2000 to the contents of a
data register D0 and store the result in D0 – can be expressed as
(assume that each instruction is 16 bits wide, or 2 bytes wide):
MAR PC move contents of PC to MAR
PC PC + 2 increment PC by 2 (why 2 ?)
MBR Mem[MAR] read instruction from memory
IR MBR move instruction to IR
CU IR(op-code) move op-code to CU
MAR IR(address) operand address ($2000) to MAR
MBR Mem[MAR] read operand from memory
ALU MBR, D0 perform addition
D0 ALU move output of ALU to D0](https://image.slidesharecdn.com/session11c-250124070911-38df02c9/85/Data-path-of-Computer-Architecture-ALU-and-other-components-14-320.jpg)
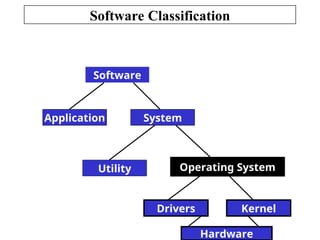
![Microprogramming
• This method was introduced in 1951 by Wilkes.
• Microprogramming means that each instruction could be translated
into a sequence of even more primitive instructions called
microinstructions, which specify the control signals for the
electronic components in every detail.
• For example, the operation ‘fetch an instruction’ in a fetch-execute
cycle can be decomposed into microinstructions as follows
MAR PC move contents of PC to MAR
PC PC + 2 increment PC by 2 (for 16 bit
machine)
MBR Mem[MAR] read instruction from memory
IR MBR move instruction to IR
CU IR(op-code) move op-code to CU](https://image.slidesharecdn.com/session11c-250124070911-38df02c9/85/Data-path-of-Computer-Architecture-ALU-and-other-components-17-320.jpg)