Downloaded 12 times
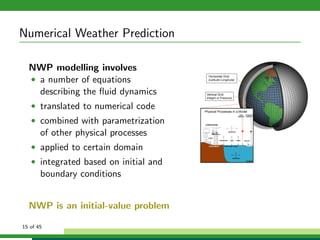
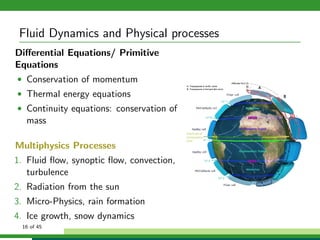
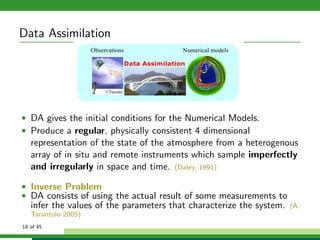
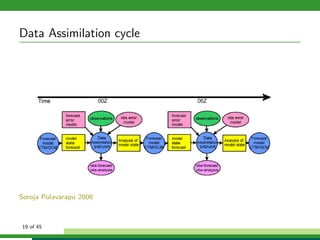
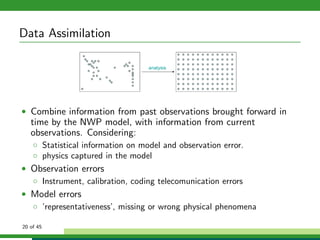
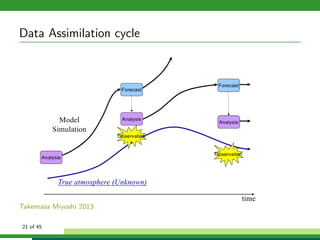
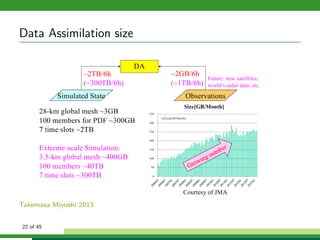
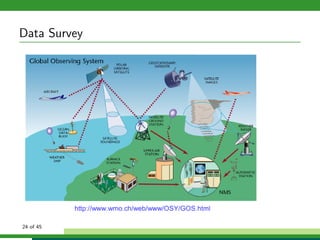
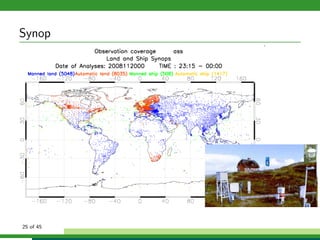
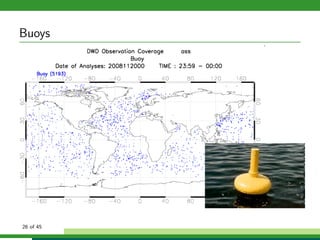
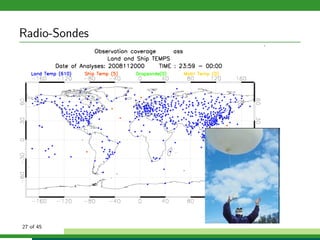
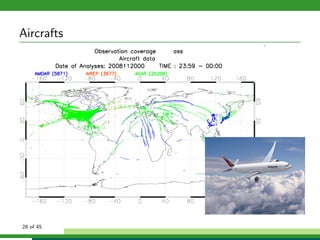
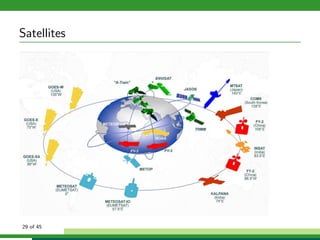
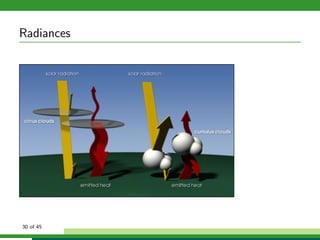
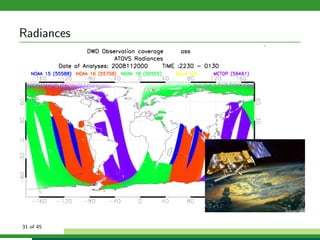
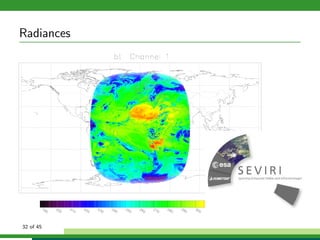


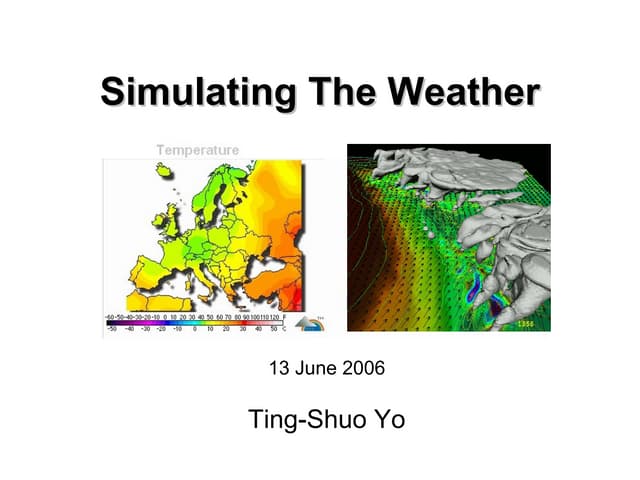
The document discusses numerical weather prediction models and data assimilation. It provides definitions of numerical weather prediction, which processes observations through computer models to forecast weather, and data assimilation, which computes initial conditions for models. It outlines the history and development of numerical weather prediction. It then describes dynamical systems, fluid dynamics equations, and physical processes modeled. It discusses the data assimilation cycle and types of weather observations, including stations, sondes, planes, and satellites. It provides an overview of data assimilation approaches used at the German Weather Service, including the basic least squares approach and ensemble Kalman filter method.