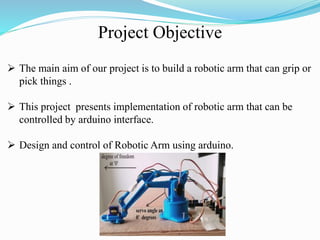
This document describes a 3D printed robotic arm that is controlled using an Arduino board. The aim of the project is to build a robotic arm that can grip and pick up objects. The arm uses servo motors connected to the Arduino board to control the movement of the arm joints. Applications of the robotic arm include industrial tasks like welding and cutting as well as bomb disposal and machine tending.




















































![[English Version]Maker-Ray Product Brochure V3 .pdf](https://cdn.slidesharecdn.com/ss_thumbnails/englishversionmaker-rayproductbrochurev3-260113094444-0156dbdc-thumbnail.jpg?width=640&height=640&fit=bounds)