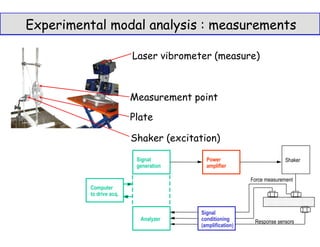
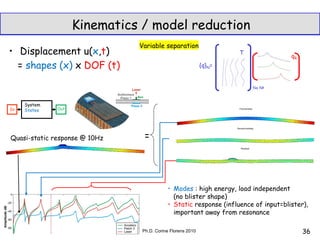
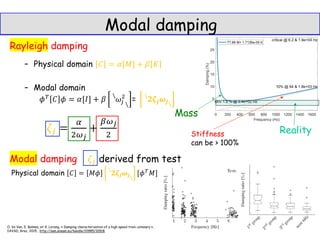
1. The document discusses experimental modal analysis which involves exciting a structure using a shaker, measuring the response using a laser vibrometer, and analyzing the transfer functions between the input and output using a computer.
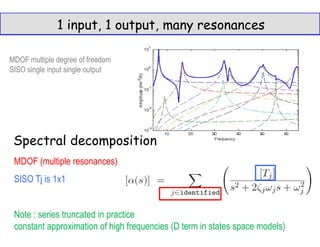
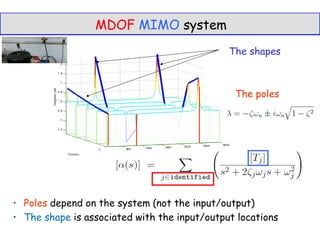
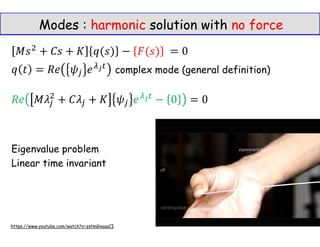
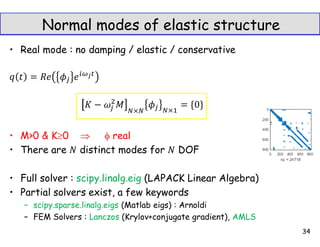
2. It describes how modal analysis can be used to model a structure as a multiple-degree-of-freedom system with multiple resonances, and how the modes can be estimated from time signals.
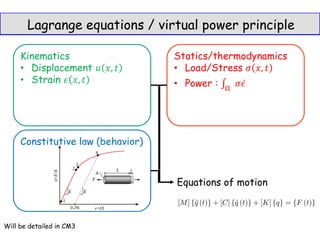
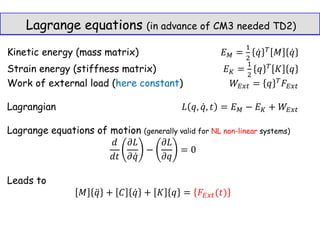
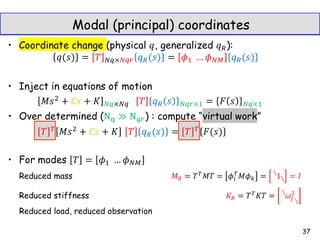
3. Lagrange equations are mentioned as a way to derive the equations of motion for a structure based on its kinetic energy, strain energy, and work done by external loads.
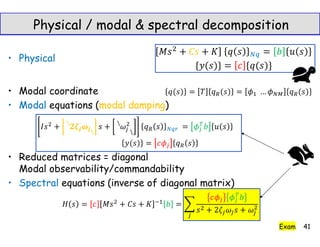
![Bode plot : visualization of transfer function
Modal analysis : transfers
In
U
Out
Y
System H
{Y(w)}=[H(w)]{U(w)}
ONE input
ONE output
MANY resonances
Transfers estimated
from time response](https://image.slidesharecdn.com/cm2mode-230324080302-14859201/85/CM2_Mode-pdf-2-320.jpg)
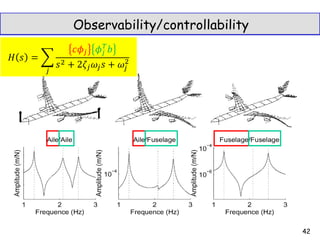
![Command
• Loads decomposed as spatially unit loads and inputs
{F(t)} = [b] {u(t)}
Abaqus : *CLOAD + *AMPLITUDE, …
NASTRAN : FORCE-MOMENT + RLOAD
ANSYS, CODE Aster, …
Illustrations TD1, 3, 5, …
39](https://image.slidesharecdn.com/cm2mode-230324080302-14859201/85/CM2_Mode-pdf-13-320.jpg)

























![Vibration Fundamentals Training [VFT]](https://cdn.slidesharecdn.com/ss_thumbnails/vftpresentation-130801102551-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





















