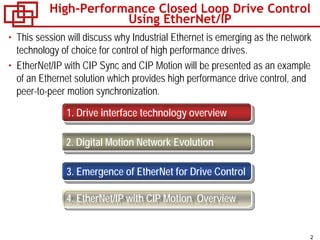
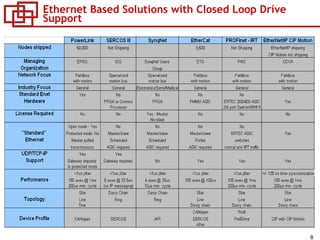
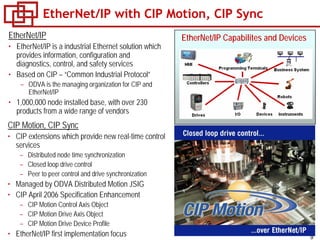
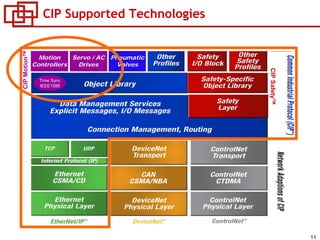
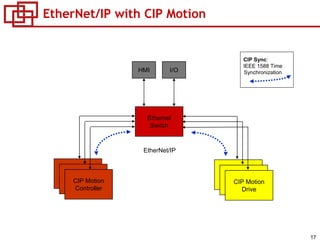
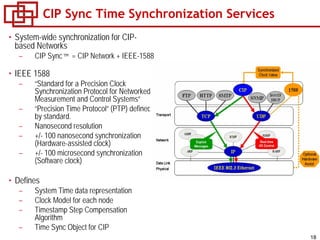
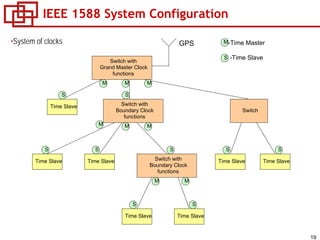
The document discusses using EtherNet/IP with CIP Motion and CIP Sync for high-performance closed loop drive control. It provides an overview of digital motion network evolution and how Ethernet is emerging as a solution. EtherNet/IP with CIP Motion and CIP Sync provides a standard Ethernet-based approach for closed loop drive control and peer-to-peer motion synchronization using CIP extensions, avoiding limitations of proprietary first-generation networks. The document outlines how CIP Motion, CIP Sync, and EtherNet/IP employ standard technologies and protocols to provide deterministic, synchronized control over Ethernet networks.