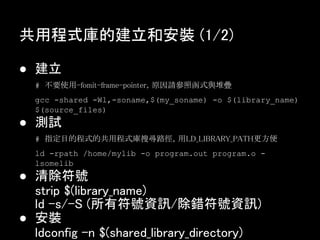
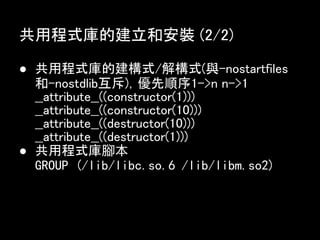
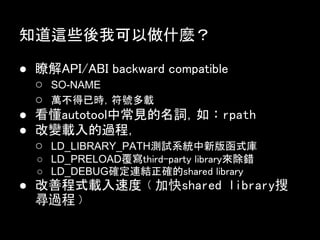
本章介绍了Linux共享库的组织,包括不兼容更新的概念与符号版本机制,以及共享库的搜索路径和版本命名规则。同时讲解了共享库的创建与安装过程,以及如何利用环境变量进行搜索路径的调整。最后,强调了理解API/ABI的向后兼容性和提升程序加载速度的重要性。