Downloaded 38 times








{
const int32_t x = position[1], y = position[0];
const uint32_t index = body_index_map.at<uint8_t>( y, x );
if( index != K4ABT_BODY_INDEX_MAP_BACKGROUND ){
pixel = colors[index % colors.size()];
}
}
);
- Background Index is 255 (K4ABT_BODY_INDEX_MAP_BACKGROUND)](https://image.slidesharecdn.com/j7xhacixskyx3a4dhz01-signature-e51c0e2af7879bfe18f47025c40ae96fa03b59dd3b3d0196307a01ef0f777793-poli-190820123000/85/Azure-Kinect-DK-C-C-16-320.jpg)
![Azure Kinect Body Tracking SDK Programming
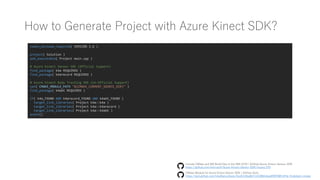
// Get Body Skeleton
std::vector<k4abt_body_t> bodies = body_frame.get_bodies();
// Get Image that used for Inference
k4a::capture body_capture = body_frame.get_capture();
k4a::image skeleton_image = body_capture.get_color_image();
cv::Mat skeleton = k4a::get_mat( skeleton_image );
// Draw Body Skeleton
for( const k4abt_body_t& body : bodies ){
for( const k4abt_joint_t& joint : body.skeleton.joints ){
k4a_float2_t position;
const bool result = calibration.convert_3d_to_2d( joint.position, K4A_CALIBRATION_TYPE_DEPTH, K4A_CALIBRATION_TYPE_COLOR, &position );
if( !result ){
continue;
}
const int32_t id = body.id;
const cv::Point point( static_cast<int32_t>( position.xy.x ), static_cast<int32_t>( position.xy.y ) );
cv::circle( skeleton, point, 5, colors[id % colors.size()], -1 );
}
}
- Get Image that used for Inference
- Convert Joint Position (3D) to 2D for Draw Circle on Image](https://image.slidesharecdn.com/j7xhacixskyx3a4dhz01-signature-e51c0e2af7879bfe18f47025c40ae96fa03b59dd3b3d0196307a01ef0f777793-poli-190820123000/85/Azure-Kinect-DK-C-C-17-320.jpg)


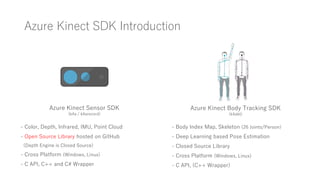
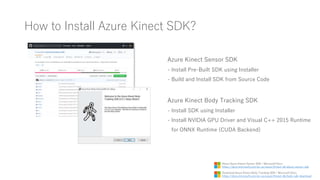
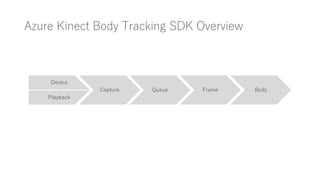
This document provides an overview and code samples for using the Azure Kinect SDK and Azure Kinect Body Tracking SDK in C/C++. It explains how to install the SDKs, generate projects, capture and process sensor data, playback recordings, and track body poses. Code samples are provided for initializing devices, capturing images, transforming data between coordinate systems, and drawing body skeletons overlaid on images.





![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)