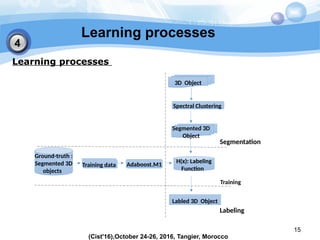
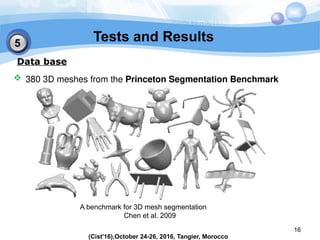
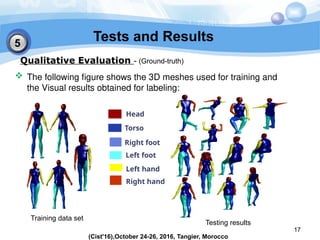
The document presents an automatic framework for labeling parts of 3D objects using spectral clustering and the AdaBoost.m1 classifier. It discusses the proposed techniques for segmenting 3D objects and learning processes, including the use of shape indices and a training dataset of 380 meshes. The results indicate a high labeling recognition rate, demonstrating the effectiveness of the proposed approach.

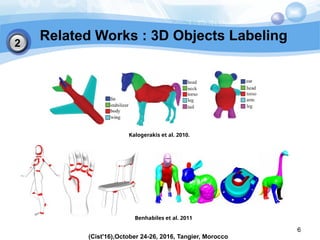
![Related work: 3D Objects segmentation
Shape Diameter
[Shapira et al. 10]
Randomized Cuts
[Golovinskiy and Funkhouser 08]
Random Walks
[Lai et al. 08]
Normalized Cuts
[Golovinskiy and Funkhouser 08]
3
2
(Cist'16),October 24-26, 2016, Tangier, Morocco](https://image.slidesharecdn.com/cist16-241117085555-cd09ddfb/85/Automatic-framework-for-3D-Objects-parts-LearningCist-16-pptx-4-320.jpg)







![14
AdaBoost.M1 is a direct and very simple extension of AdaBoost,
except that the base learner (weak learner) is now a multiclass
learner instead of a binary one.
One dimensional decision stumps are used as weak learners.
Adaboost.M1 Algorithm
Learning our classification model is done using the classifier
AdaBoost.M1 [Freund and Schapire, 1997] via a corpus of 3D
mesh (Ground-truth)
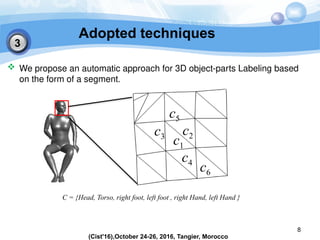
Adopted techniques
3
3
(Cist'16),October 24-26, 2016, Tangier, Morocco](https://image.slidesharecdn.com/cist16-241117085555-cd09ddfb/85/Automatic-framework-for-3D-Objects-parts-LearningCist-16-pptx-14-320.jpg)