Download to read offline






![• The joint rotation – translation matrix [R|t] is called a matrix of extrinsic
parameters. It is used to describe the camera motion around a static
scene, or vice versa, rigid motion of an objects in front of a still camera.
That is, [R|t] translates coordinates of a point (X, Y, Z) to a coordinate
system, fixed with respect to the camera. Another way to represent 3D
construction formulas:](https://image.slidesharecdn.com/6f476795-b1a9-46b0-8d45-a566f7e35453-160103204945/85/ANISH_and_DR-DANIEL_augmented_reality_presentation-7-320.jpg)
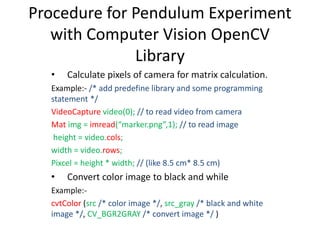




This document describes using augmented reality to enhance a physics experiment on pendulums. It defines augmented reality as computer-generated virtual objects superimposed on live camera images using fiducial markers and computer vision. It outlines the tools used to develop augmented reality applications, including fiducial markers, C++, OpenCV library, and OpenGL. It provides the mathematical formulas and procedures for camera calibration and 3D construction to precisely position virtual objects in the scene. Specifically, it details the steps to implement a pendulum experiment using OpenCV functions to find marker corners in images and calculate intrinsic and extrinsic camera parameters. The conclusion states that other science experiments will also be augmented and potential applications include face recognition and automatic paper grading.




![Photogrametry_3D_Modelling[1]](https://cdn.slidesharecdn.com/ss_thumbnails/b4a1c050-6a05-4cea-865f-e8cbdee2953f-161221064722-thumbnail.jpg?width=640&height=640&fit=bounds)