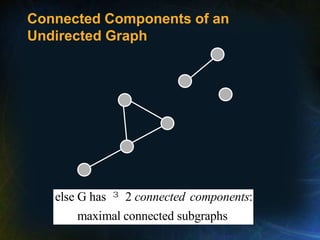
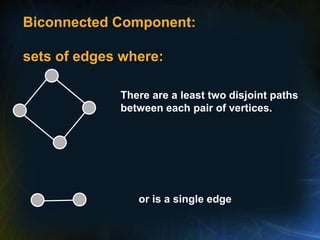
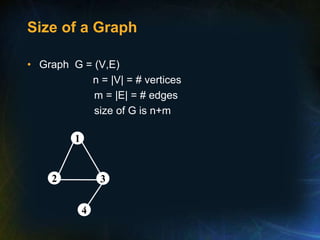
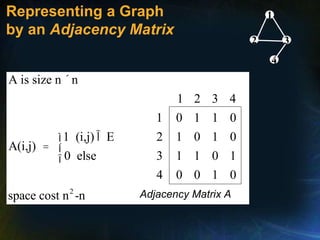
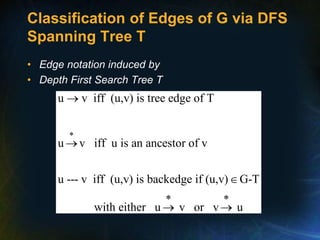
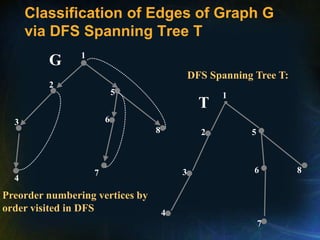
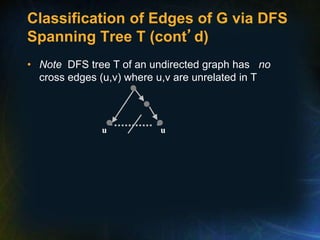
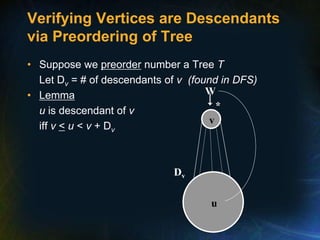
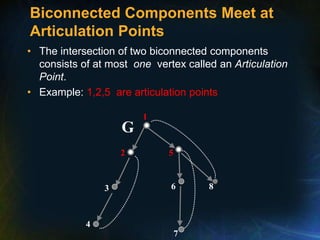
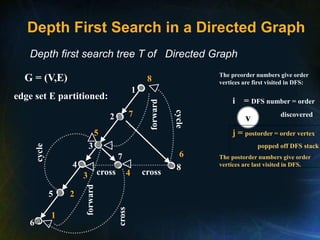
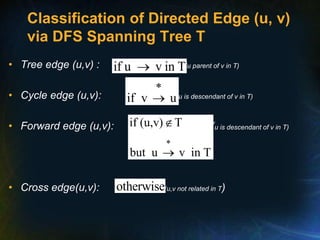
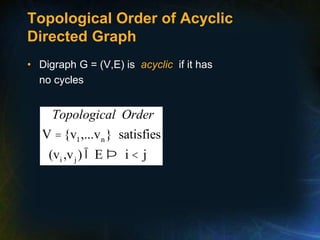
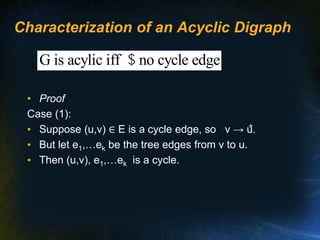
This document discusses graph algorithms using depth-first search (DFS). It begins by defining graph terminology such as vertices, edges, directed and undirected graphs. It then explains DFS, including classifying edges based on the DFS spanning tree. It describes applications of DFS such as finding biconnected components, articulation points, and strongly connected components in directed graphs. The document provides pseudocode for DFS and algorithms for these applications that run in linear time with respect to the number of vertices and edges.

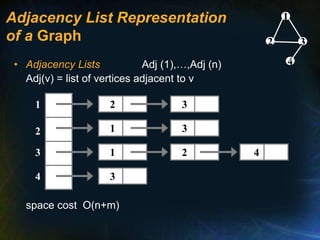
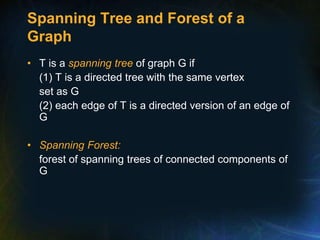
![Preorder Tree Traversal
• Preorder: A,B,C,D,E,F,H,I
[1] root (order vertices as pushed on
stack)
[2] preorder left subtree
[3] preorder right subtree
B
A
C
D
E
F
H I](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-18-320.jpg)
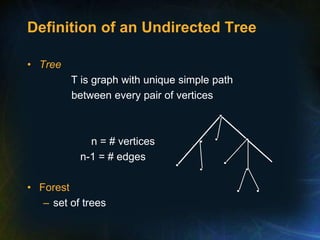
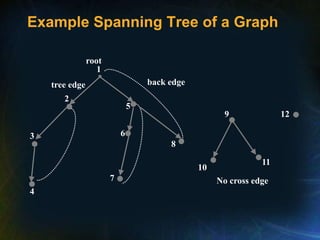
![Postorder Tree Traversal
• Postorder: B,E,D,H,I,F,C,A
[1] postorder left subtree
[2] postorder right subtree
[3] root (order vertices as popped off
stack)
B
A
C
D
E
F
H I](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-19-320.jpg)
![Tarjan’s Depth First Search Algorithm
• We assume a Random Access Machine (RAM)
computational model
• Algorithm Depth First Search
graph G (V,E) represented by
adjacency lists Adj(v) for each v V
[0] N 0
[1] all v V (number (v) 0
children (v) ( ) )
[2] all v V do
Input
for do
od
for
=
Î
¬
Î ¬
¬
Î
number (v) 0 DFS(v)
[3] spanning forest defined by children
if then
output
=](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-23-320.jpg)
![Recursive DFS Procedure
DFS(v)
[1] N N + 1; number (v) N
[2] for each u Adj(v)
number (u) 0
(add u to children (v); DFS(u))
recursive procedure
do
if then
¬ ¬
Î
=
The preorder numbers give the order the vertices are first
visited in DFS.](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-24-320.jpg)
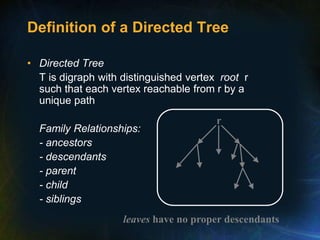
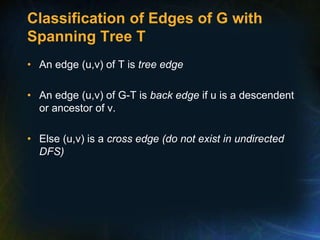
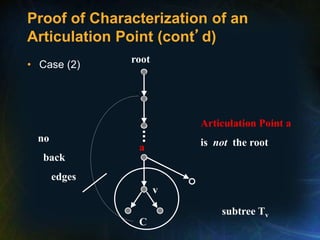
![Graph with DFS Numbering of
vertices [Low Values in Brackets]
7[5]
1[1]
2[2]
4[2]
3[2]
5[1]
8[1]
6[5]
v[low(v)]](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-32-320.jpg)
![Biconnected Components Algorithm
[0] initialize a STACK to empty
During a DFS traversal do
[1] add visited edge to STACK
[2] compute low of visited vertex v using Lemma
[3] test if v is an articulation point
[4] if so, for each u ∈ children (v) in order
where low (u) > v
do Pop all edges in STACK
upto and including tree edge (v,u)
Output popped edges as a
biconnected component of G
od](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-42-320.jpg)
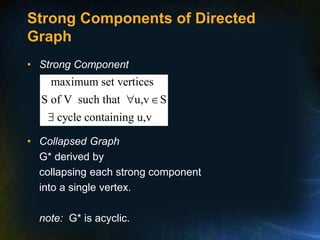
![Algorithm Strong Components
Input digraph G
[1] Perform DFS on G. Renumber vertices
by postorder of the DFS of G.
[2] Let G- be the reverse digraph derived
from G by reversing direction of each edge.](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-51-320.jpg)
![Algorithm Strong Components
(cont’d)
[3] Perform DFS on G-, starting at highest
(in postorder of G) numbered vertex.
Output resulting DFS tree of G- as a strongly
connected component of G.
[4] repeat [3], starting at highest numbered
vertex not so for visited (halt when all
vertices visited)](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-52-320.jpg)
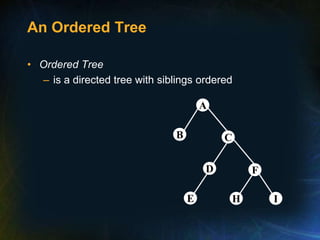
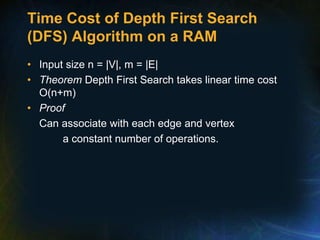
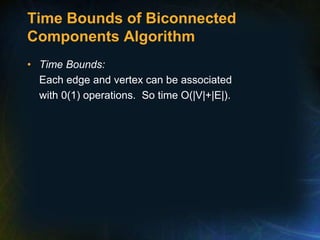
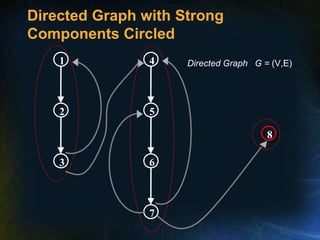
![Example of Step [1] of Strong
Components Algorithm
3
1
2
4
7
5
6
8
8
7
6
5
3
4
2
1
Example Input
Digraph G
(postorder numbering
of G given in gold)](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-54-320.jpg)
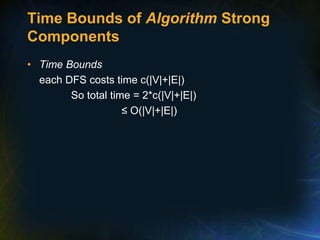
![Example of Step [2] of Strong
Components Algorithm
3
1
2
4
7
5
6
8
8
7
6
5
3
4
2
1
Reverse
Digraph G-
(postorder numbering
of G given in gold)](https://image.slidesharecdn.com/alg5-220723124603-e4c90c96/85/ALG5-1-ppt-55-320.jpg)