Download to read offline

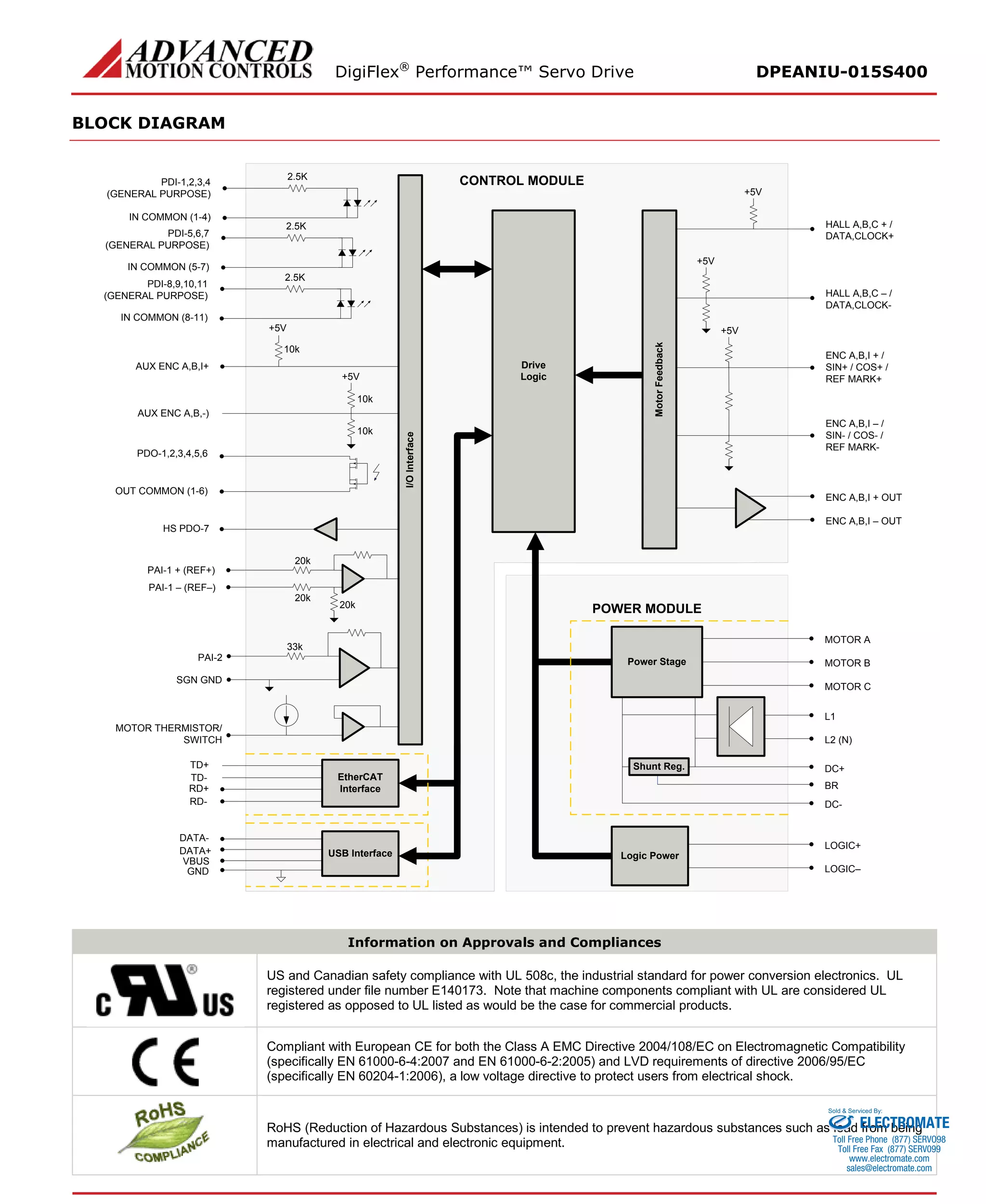
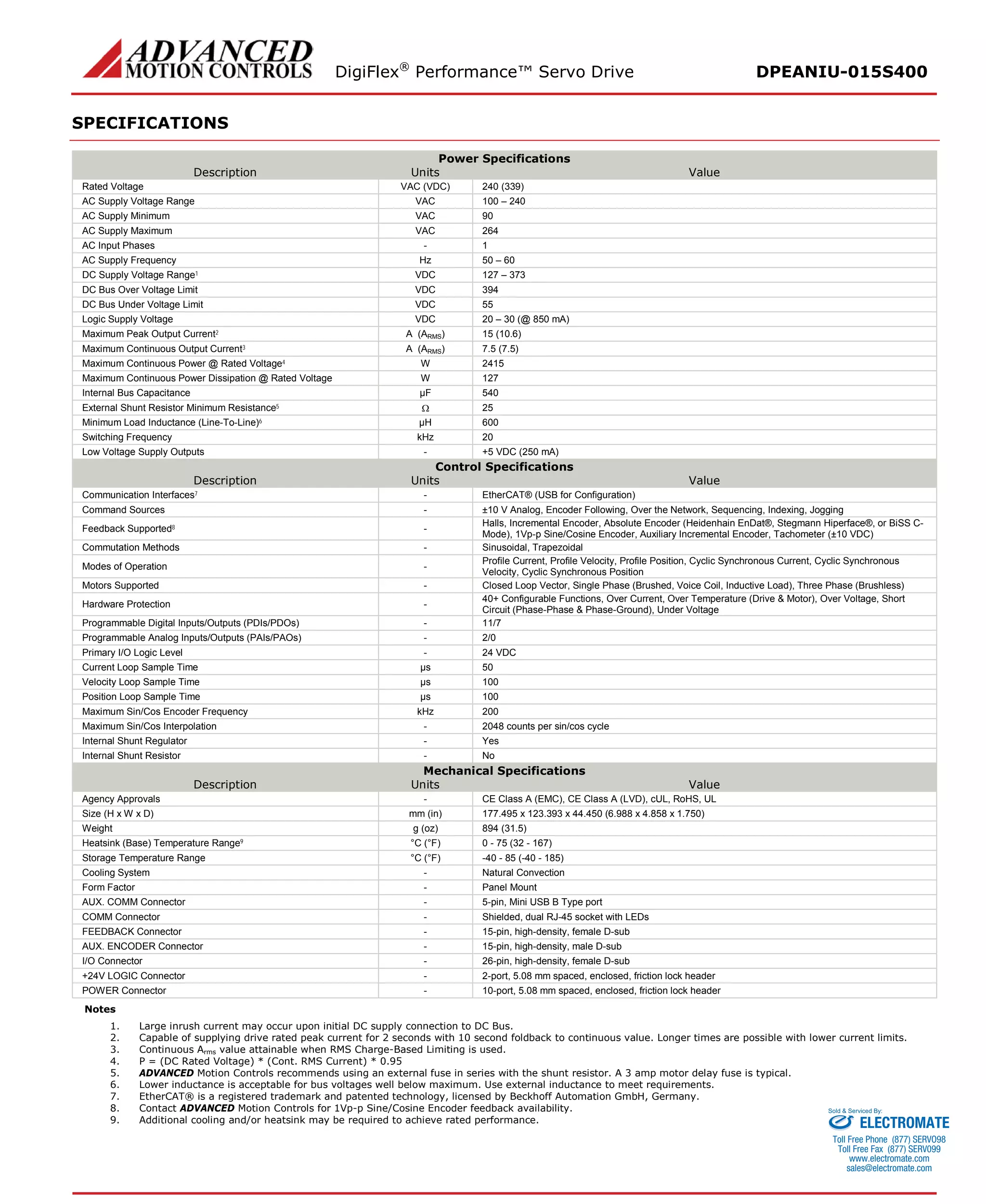
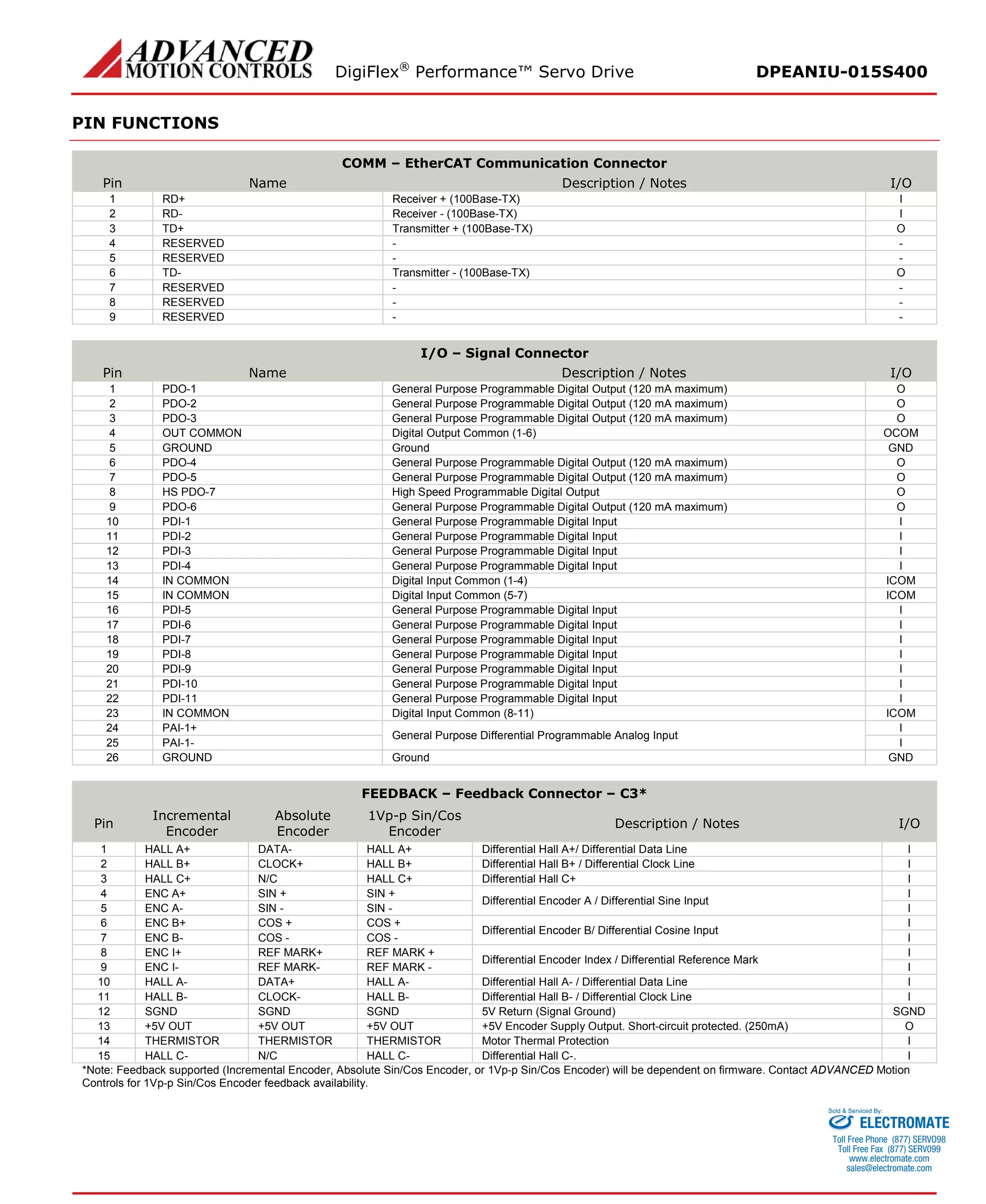
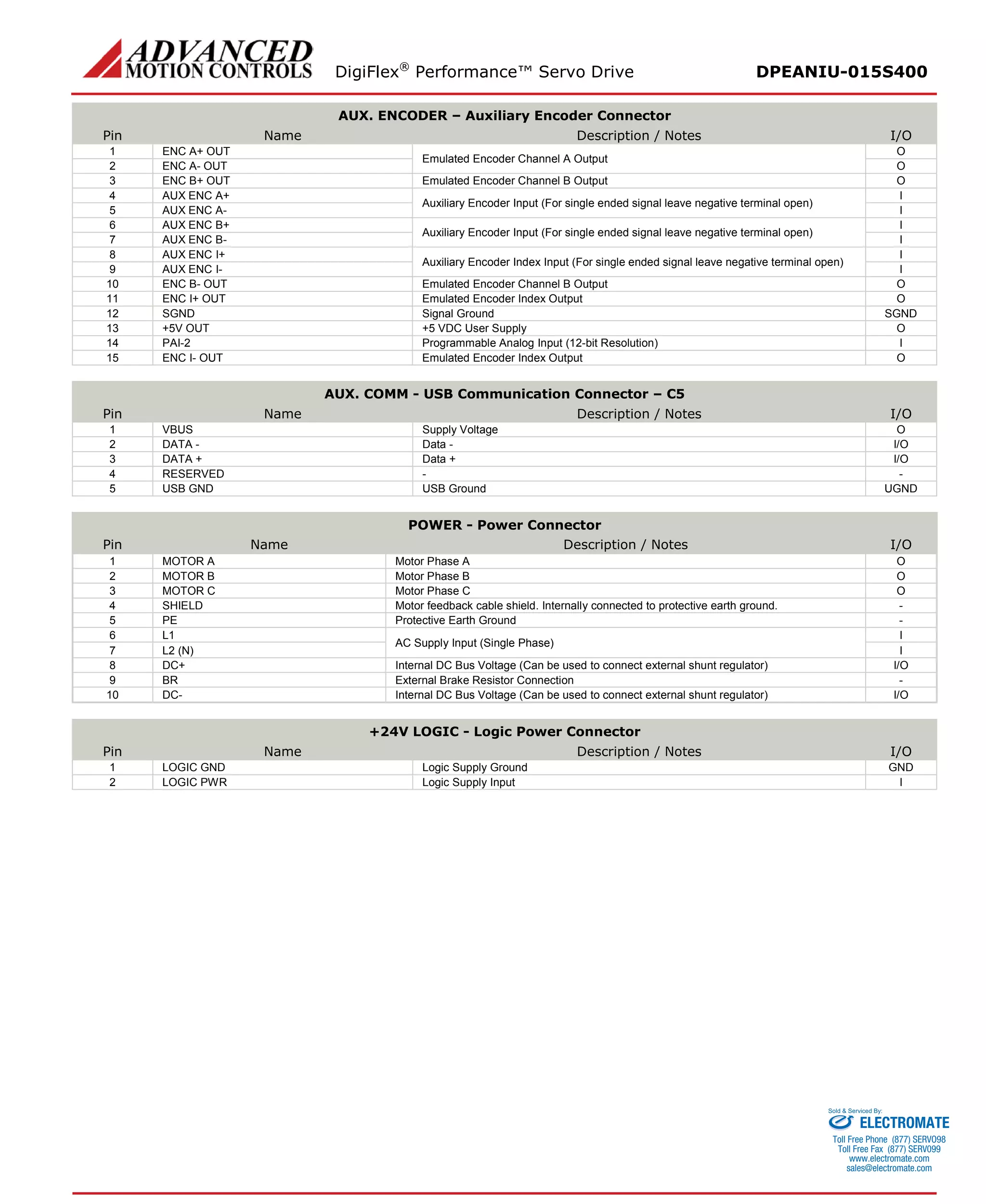
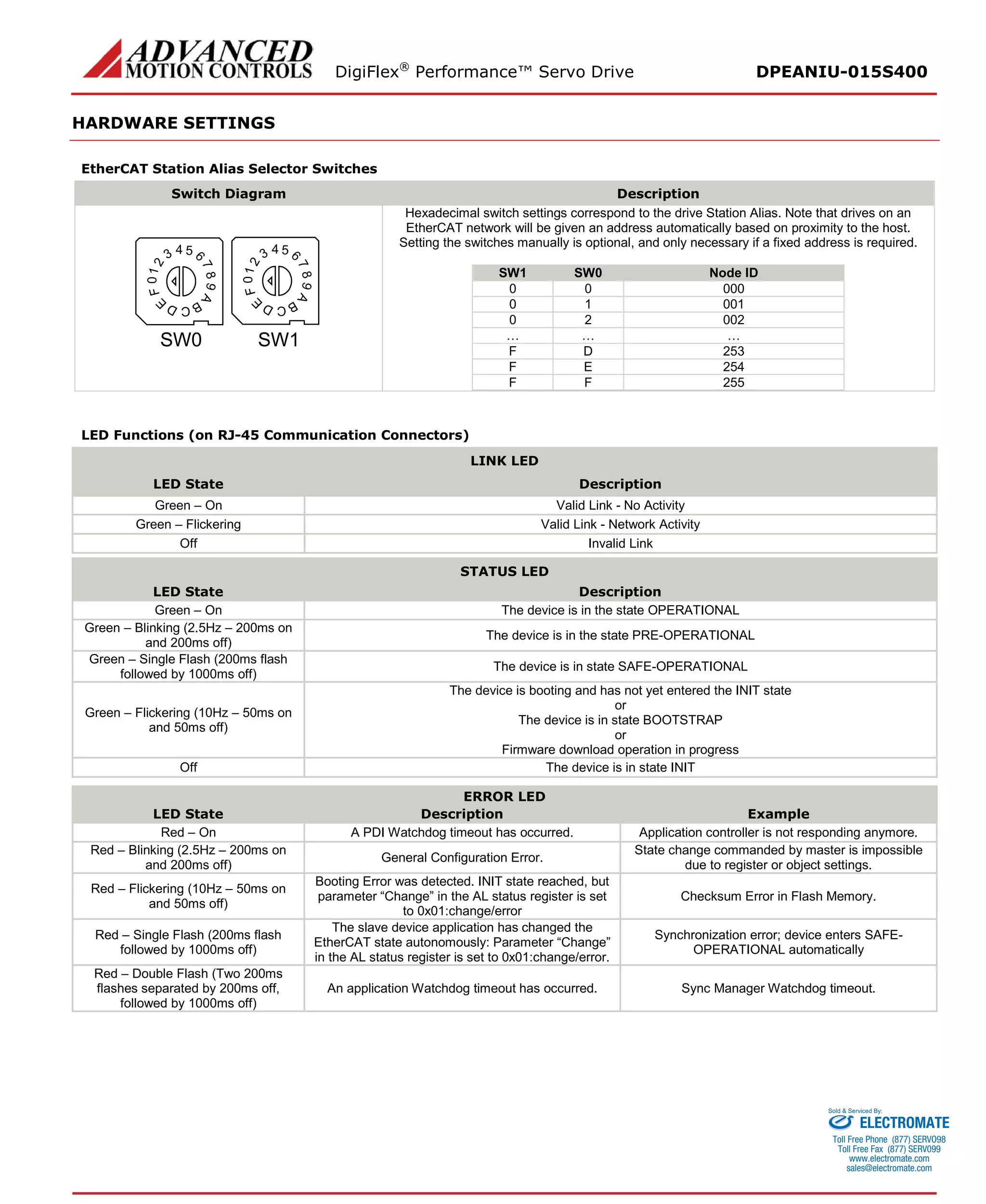
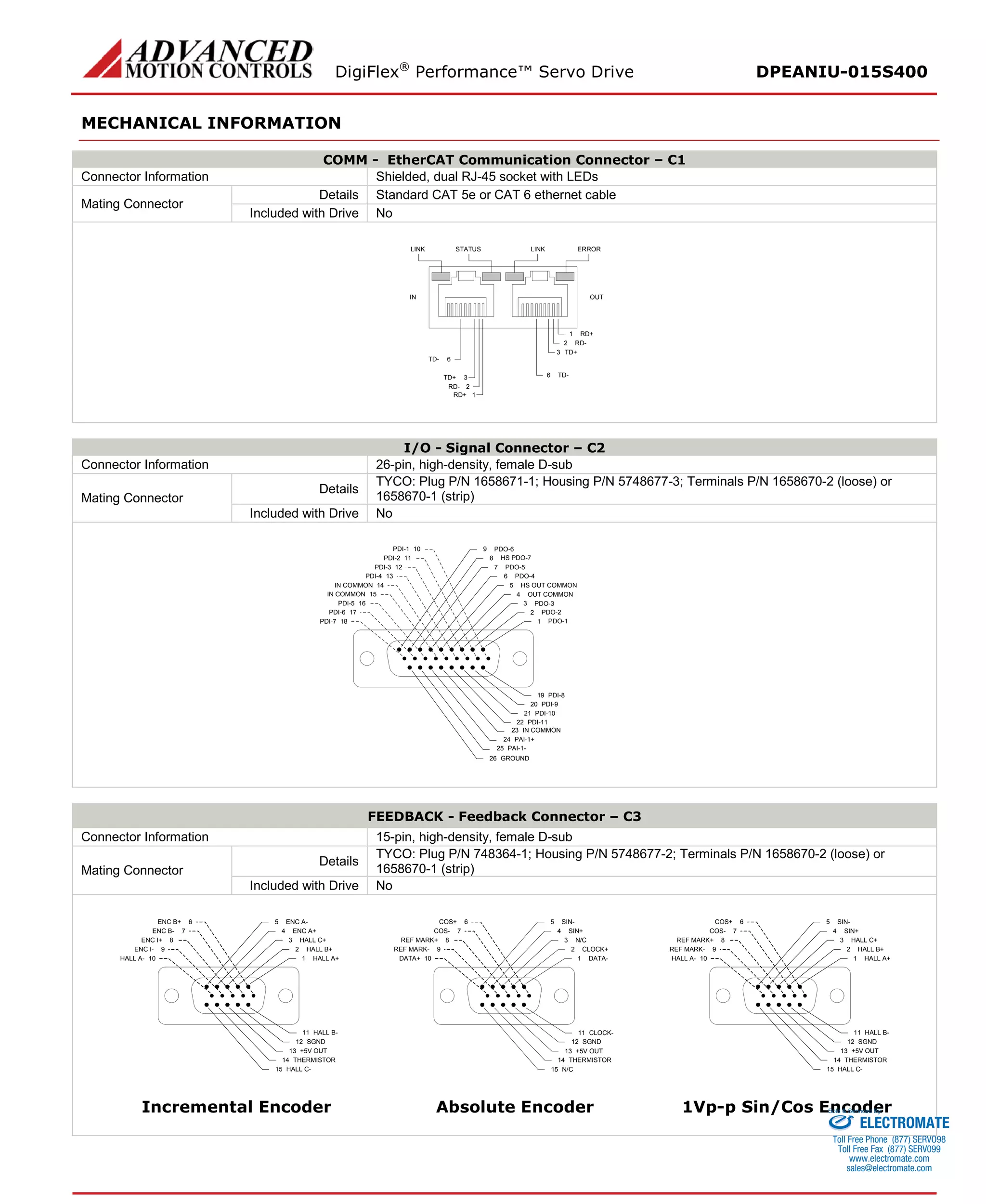
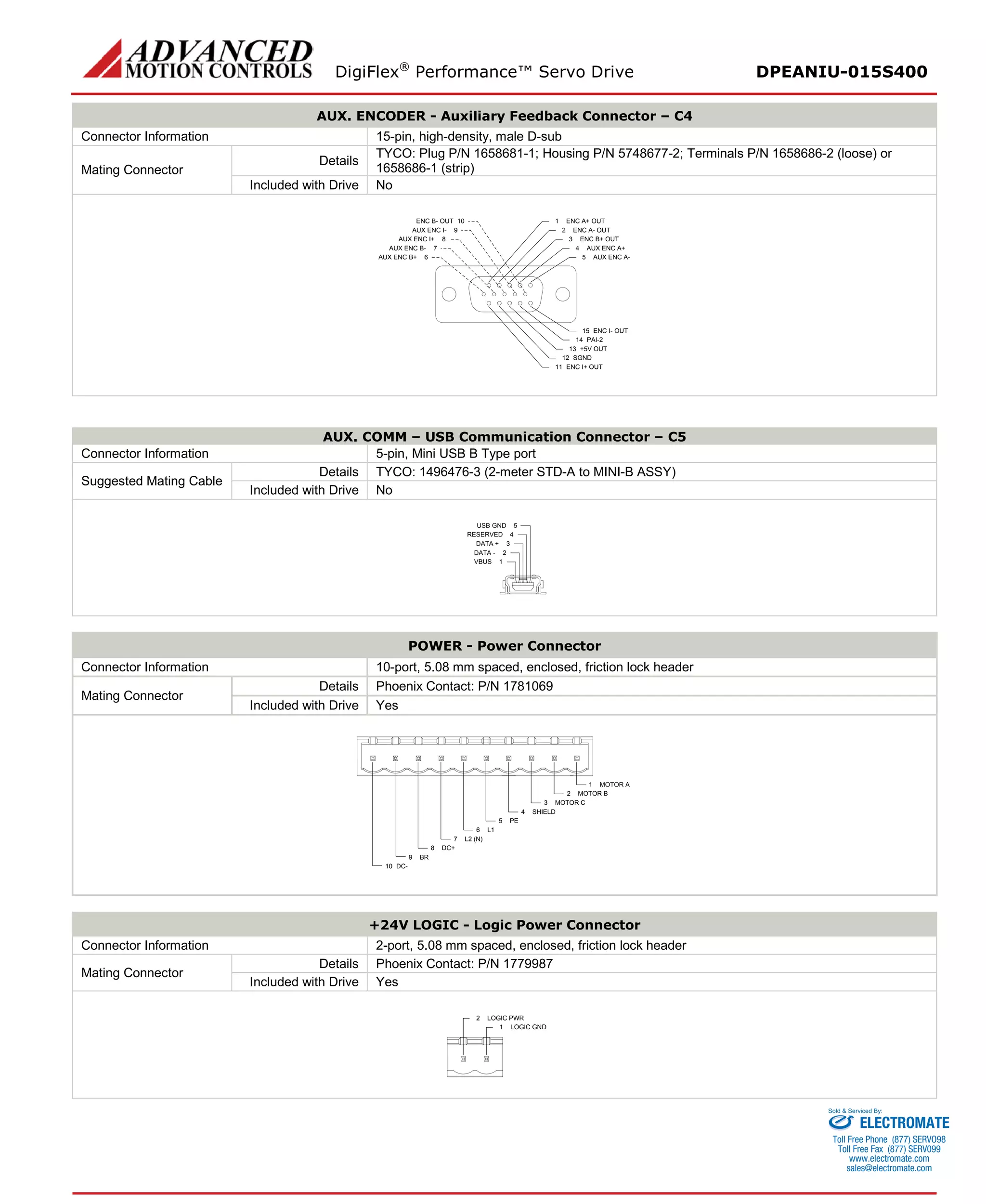

This servo drive is designed to drive brushed and brushless motors in torque, velocity, or position mode. It features an EtherCAT interface for network communication and USB port for configuration. It supports various feedback types including encoders and has programmable digital and analog inputs and outputs. The drive operates in different motor control modes and can be commanded from various sources over networks or analog signals.




















































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)












