Downloaded 49 times






![Elenco delle figure
1.1 Alcuni robot esploratori . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2 Alcuni robot mobili presenti nel laboratorio SIED . . . . . . . . . . . . . . 11
1.3 Schematizzazione di un robot mobile . . . . . . . . . . . . . . . . . . . . . 12
1.4 Sonar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5 Laser scanner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.6 Alcuni tipi di mappe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.7 Simulatori per robot mobili . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1 Fenomeno di rifrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2 Fenomeno di diffrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3 Il procedimento di trilaterazione . . . . . . . . . . . . . . . . . . . . . . . 37
2.4 Impronte RSS nel sistema RADAR [BP00] . . . . . . . . . . . . . . . . . . 39
2.5 Alcuni approcci di localizzazione range-free . . . . . . . . . . . . . . . . . 40
3.1 Bitrate e range trasmissivi di ZigBee rispetto ad altri standard wireless . . 45
3.2 Lo stack ZigBee completo . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3 Spreading e modulazione in 802.15.4 . . . . . . . . . . . . . . . . . . . . . 47
3.4 Coesistenza di ZigBee con 802.11 . . . . . . . . . . . . . . . . . . . . . . . 48
3.5 Organizzazione in SAP di ZigBee . . . . . . . . . . . . . . . . . . . . . . . 50
3.6 Accesso al mezzo con beacon . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.7 Accesso al mezzo senza beacon . . . . . . . . . . . . . . . . . . . . . . . . 52
3.8 I SAP dello strato MAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.9 Topologie di rete ZigBee . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.10 I SAP dello strato NWK . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.11 Concetto di binding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.1 La Sensor Reference Board (SRB) basata sul SiP MC13213 di Freescale . 61
4.2 Struttura ad F-Antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.3 Test di orientamento dell’antenna . . . . . . . . . . . . . . . . . . . . . . . 64
4.4 Setup per i test outdoor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.5 Andamento del LQI con la distanza (media e varianza) . . . . . . . . . . . 66
4.6 Distribuzione dei valori del LQI per ogni intervallo . . . . . . . . . . . . . 67
4.7 Posizioni e rilevazioni di LQI nell’abitazione . . . . . . . . . . . . . . . . . 69
4.8 Test dinamici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.9 Risultati dei test dinamici . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.10 Posizioni e valori delle rilevazioni LQI al DIS . . . . . . . . . . . . . . . . 72
5.1 Sistema di riferimento per il robot . . . . . . . . . . . . . . . . . . . . . . 75
5.2 Esplorazione basata su frontiere . . . . . . . . . . . . . . . . . . . . . . . . 75
vii](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-9-2048.jpg)



![Introduzione
La possibilit` di creare reti a basso costo e ad alta densit` come le Wireless Sensor
a a
Network (WSN) ha introdotto scenari applicativi prima irrealizzabili, che vanno dal mo-
nitoraggio di impianti alla domotica. Le loro capacit` di mobilit` ed auto-organizzazione,
a a
con la caratteristica, inoltre, di non dipendere da un’infrastruttura di rete fissa, le hanno
rese ormai l’icona dell’Ubiquitous Computing.
La funzione principale di una WSN ` quella di riportare eventi relativi all’ambiente
e
controllato, oltre a trasportare dati e informazioni provenienti dai molteplici sensori pre-
senti. In letteratura, tuttavia, ` sempre pi` frequente l’idea di aggiungere funzionalit`
e u a
differenti dal controllo e dal monitoraggio; si pensi ad esempio al contributo informativo
apportato dalla localizzazione di un sensore, oltre al valore della grandezza fisica misu-
rata. In definitiva, per un utente ` importante sapere, sia che una soglia di attenzione `
e e
stata superata, sia in quale punto preciso della rete, dato che informazioni non associate
alla loro localizzazione potrebbero essere prive di significato.
Le possibilit` offerte dalle WSN e dalle capacit` di localizzare dei nodi al loro interno
a a
[MFA07], le rendono appetibili anche nel campo della robotica, ad esempio per l’impiego
`
su robot mobili. E facile immaginare come informazioni sulla localizzazione di punti di
interesse possano divenire di estrema importanza in problemi di SLAM (Simultaneous
Localization and Mapping) [DWB06a, DWB06b] oppure per diminuire i tempi nella
ricerca di oggetti o zone particolari. Si comprende inoltre, quanto ci` sia di interesse
o
primario in ambienti indoor (industrie, uffici, abitazioni), o dove comunque non c’` la
e
possibilit` di utilizzare altri sistemi di posizionamento (come ad esempio GPS).
a
Attualmente, l’esplorazione rappresenta la tecnica principale mediante il quale pos-
sono essere risolti i problemi di ricerca [BFDW03, BCC+ 04] in ambienti non noti a
priori, in quanto gradualmente l’area sconosciuta viene ridotta, fino a permettere di
trovare l’obiettivo. Se ne deduce facilmente che, se non si hanno informazioni ag-
giuntive sulla localizzazione dell’obiettivo, si procede praticamente per tentativi, con
una ricerca cieca. Effettivamente, questa ` la metodologia seguita da molti approcci
e
[Yam98, BMF+ 00, KPN, MTK, SB03] che si basano sul concetto di frontiera di esplo-
razione [Yam97], ovvero la zona di confine tra lo spazio noto e quello inesplorato. In
tali sistemi, l’esplorazione procede ad ogni passo visitando una frontiera, diminuendo in
1](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-15-2048.jpg)
![Introduzione 2
questo modo lo spazio di ricerca. Il problema principale, risiede nel fatto che la selezione
della frontiera viene effettuata casualmente o al massimo con strategie greedy (scegliendo
ad esempio quella pi` vicina al robot), dato che in molti casi non si hanno altre sorgenti
u
informative per procedere diversamente.
Lo scopo di questa tesi ` l’integrazione di sistemi di robotica mobile con gli strumenti
e
e le potenzialit` offerte dalle WSN, mediante un’applicazione di supporto alla localizza-
a
zione. L’approccio utilizzato in questo lavoro di tesi sfrutta le informazioni sulla qualit`
a
del segnale radio (Link Quality Indicator ) ricevuto dai nodi della WSN, installati a bordo
del robot, per guidarne l’esplorazione al fine di raggiungere zone di interesse segnalate da
altrettanti dispositivi. Come vedremo, alla rete possono appartenere sia i robot, sia altri
nodi che possono segnalare oggetti o essere rilasciati durante l’esplorazione stessa, con
la funzione di landmark [SN04]. I dispositivi selezionati per la realizzazione del sistema
seguono lo standard per le LR-WPAN (Low-Rate Wireless Personal Area Network), Zig-
Bee. La scelta di questa tecnologia ` avvenuta dopo un’ampia fase di studio, effettuata
e
presso il laboratorio RFID-Lab, dell’Universit` di Roma “Sapienza”, in cui sono stati
a
considerati attentamente i requisiti del sistema da realizzare.
Occorre notare che, in questo lavoro, non si cerca di risolvere un problema di loca-
lizzazione wireless assoluta, affrontato gi` ampiamente in altri lavori [Pat05, BGGT07,
a
SKOM06, PHP+ 03, BP00, HHB+ 03] e peraltro di non facile soluzione se si considera-
no ambienti indoor, a causa di fenomeni fisici come attenuazione e multipath [Rap01].
Tali considerazioni hanno richiesto un lungo periodo di sperimentazione, in cui sono
stati realizzati test sia in ambienti outdoor che indoor, orientati a dimostrare quanto
gi` noto in letteratura e a far comprendere le modalit` con cui affrontare un problema
a a
di localizzazione basato su dispositivi wireless. L’approccio proposto tenta di applicare
i meccanismi alla base della localizzazione, al problema dell’esplorazione, presentandosi
come un algoritmo in grado di guidare il robot verso l’obiettivo della ricerca, mediante
un’euristica che si basa sul principio elementare per cui la potenza del segnale decresce
con la distanza. In questo modo, anche se ` difficile ricavare esattamente la distanza che
e
separa trasmettitore e ricevitore, ` possibile stimare qualitativamente quanto si ` vicini
e e
alla sorgente del segnale. Di conseguenza, la ricerca che prima era cieca, si trasforma in
ricerca informata, con il vantaggio non indifferente che per la scelta della prossima fron-
tiera da esplorare, il robot avr` a disposizione qualcosa in pi` di una semplice strategia
a u
greedy.
La possibilit` di effettuare un’esplorazione guidata aiuta, oltre che a diminuire i
a
tempi di ricerca, anche ad aumentare l’autonomia energetica del robot, evitando zone
dell’ambiente non rilevanti ai fini della missione. Uno degli scenari mediante il quale
si pu` comprendere l’utilit` dell’idea presentata, ` l’impiego del sistema in problemi di
o a e
Search and Rescue [HSI+ 99], in cui i robot mobili forniscono il loro supporto a squadre
di soccorritori umani, in operazioni di ricerca e salvataggio in ambienti che hanno subito](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-16-2048.jpg)
![Introduzione 3
`
catastrofi o devastazioni, ad alto rischio per i soccorritori stessi. E facile immaginare
come informazioni sulla localizzazione di punti di interesse (ostacoli, feriti, punti di
raccolta, altri robot) possano divenire di estrema importanza per diminuire i tempi di
esplorazione di aree devastate, con la conseguenza di aumentare la probabilit` di salvare
a
anche vite umane. Inoltre, considerate le possibilit` di miniaturizzazione che possono
a
essere raggiunte nella produzione di dispositivi ZigBee, possiamo pensare ad uno scenario
in cui ogni persona pu` indossare un ricevitore e che, nel caso di incidenti o devastazioni,
o
esso possa essere interrogato, in modo da facilitare il raggiungimento della vittima stessa.
Ad esempio, tali situazioni possono verificarsi in impianti industriali ad alto rischio, dove
sono potenzialmente possibili incendi, crolli strutturali o emissioni di sostanze tossiche.
Altri possibili esempi di applicazione, in cui l’approccio pu` portare i suoi vantaggi,
o
sono il problema del rendezvous [DR97, ZLV07] tra robot, il deployment di reti ad-
hoc in situazioni di emergenza [RB05, HMS02] e alcuni scenari di sorveglianza robotica
[HBB+ 00].
Questa tesi si focalizza sul problema base del raggiungimento da parte di un robot
mobile equipaggiato con un dispositivo wireless ZigBee di un punto di interesse dove `
e
presente un altro di questi dispositivi, non in movimento. La soluzione di tale problema,
per motivi di complessit`, non considera un ambiente multi-robot, ma ` sicuramente
a e
estendibile a scenari di tale tipologia. Il sistema ` stato implementato in C++, su piat-
e
taforma Unix, sotto forma di moduli indipendenti per il framework per robot mobili
SPQR-RDK [FGI05]. La tesi ` stata sviluppata presso il laboratorio SIED (Sistemi
e
Intelligenti per le Emergenze e la Difesa civile), nato dalla collaborazione tra l’Istituto
Superiore Antincendi ed il Dipartimento di Informatica e Sistemistica (DIS) dell’Univer-
sit` di Roma “Sapienza”, con l’obiettivo di svolgere attivit` di ricerca volte allo sviluppo
a a
di metodologie, tecniche e strumenti prototipali da utilizzare in operazioni di soccorso.
Problematiche affrontate
La realizzazione di questo lavoro mi ha permesso di studiare diverse problematiche,
inerenti sia al campo delle reti di sensori che della robotica mobile. In particolare sono
stati affrontati i seguenti temi:
• Sperimentazione e selezione, presso l’RFID-Lab, di una piattaforma hardware/-
software per WSN, al fine di individuarne una idonea all’implementazione di un
sistema di localizzazione wireless.
• Studio del protocollo per LR-WPAN ZigBee, in particolare gli strati MAC, rete e
applicazione, in modo da acquisire i primi strumenti concettuali e applicativi per
progettare e implementare piccole applicazioni.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-17-2048.jpg)

![Introduzione 5
del LQI). L’idea presentata pu` inoltre essere estesa a scenari multi-robot, agevolando
o
la soluzione di problemi come il rendezvous [DR97] o il coordinamento durante alcune
fasi dell’esplorazione multiagente [ZKNN07].
Traccia dell’esposizione
L’esposizione ` organizzata come segue:
e
• Capitolo 1: Presentazione di tematiche relative all’esplorazione di robot mobili e
dei componenti hardware/software necessari per l’esplorazione autonoma. Ven-
gono descritti i concetti e gli strumenti della robotica disponibili per sviluppare
l’approccio descritto, sottolineando alcune tecniche per l’esplorazione autonoma.
• Capitolo 2: Introduzione agli approcci per la localizzazione wireless e descrizione
dei fenomeni fisici che influenzano le trasmissioni wireless. Lo studio effettuato, ha
permesso di comprendere in dettaglio i problemi da tenere in considerazione nella
realizzazione di un sistema di localizzazione.
• Capitolo 3: Descrizione dello standard per le LR-WPAN, ZigBee, focalizzando
l’attenzione sulle funzionalit` dello stack che sono risultate di interesse per nel-
a
la valutazione e la successiva implementazione delle applicazioni. Tale studio ha
permesso di avere le prime indicazioni da cui partire per risolvere un problema di lo-
calizzazione, ottenute analizzando le informazioni restituite dalle primitive relative
alla qualit` del segnale (Link Quality Indicator ). Sono inoltre riportate le motiva-
a
zioni che hanno portato alla selezione di dispositivi ZigBee per la realizzazione di
questo lavoro di tesi.
• Capitolo 4: Illustrazione di esperimenti indoor/outdoor sulla variazione della qua-
lit` del segnale e presentazione della piattaforma hardware selezionata per gli espe-
a
rimenti. Il capitolo contiene i numerosi test trasmissivi, effettuati al fine di deter-
minarne l’idoneit` alla realizzazione di un sistema di localizzazione. La grande
a
quantit` di dati raccolti ci ha permesso, non solo di verificare in parte alcuni
a
concetti teorici sulle trasmissioni wireless, ma anche di definire gradualmente il
problema reale che si voleva risolvere.
• Capitolo 5: In questo capitolo viene illustrata l’idea dominante di questa tesi, ov-
vero l’uso dell’informazione sulla qualit` del segnale per effettuare una esplorazione
a
guidata. Viene fatta una descrizione approfondita dell’algoritmo euristico ideato,
motivando le scelte effettuate nella sua progettazione. Vengono inoltre citati alcuni
scenari significativi di applicazione.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-19-2048.jpg)


![Capitolo 1. Robot per l’esplorazione autonoma 9
inoltre introdotte alcune conoscenze di base sui robot idonei all’esplorazione autonoma,
mettendo in evidenza l’importanza dei sensori impiegati e dei moduli software necessari
alla navigazione. Una sezione ` riservata alla descrizione di alcuni approcci esistenti per
e
effettuare esplorazione autonoma, mentre la parte conclusiva ha lo scopo di presentare
gli strumenti software disponibili, come i simulatori e il framework per robot mobili,
SPQR-RDK.
1.1 Possibili scenari
Un robot mobile, in grado di esplorare autonomamente un ambiente, introduce sicura-
mente nuove possibilit`. Nel seguito vengono descritti alcuni scenari significativi, in cui
a
essi forniscono il loro importante contributo, sostituendo effettivamente o potenzialmente
operatori umani.
Ambiente domestico e medico Uno dei primi impieghi dei robot mobili ` stato quel-
e
lo di sostituire l’uomo in task ripetitivi in ambiente domestico, come pulire i pa-
vimenti o tagliare l’erba. Uno scenario altrettanto importante ` quello di fornire
e
servizi di assistenza alla persona, in strutture mediche o paramediche (si veda ad
esempio il progetto RoboCare1 ). All’interno della RoboCup 2 , esiste da qualche
anno la competizione RoboCup@Home, in cui viene incoraggiato lo sviluppo di
applicazioni robotiche in grado di assistere l’uomo nelle operazioni di tutti i giorni.
Sicurezza L’utilizzo di robot in ambienti dove la sicurezza ` importante sta guada-
e
gnando sempre maggiori spazi, ad esempio in ambienti dove l’intervento umano
` rischioso (demining, operazioni militari) o dove il monitoraggio richiede accura-
e
tezza e tempestivit` (sorveglianza). Altri possibili impieghi prevedono il controllo
a
ambientale, per rilevare la presenza di sostanze tossiche, fumi o radiazioni in aree
industriali.
Soccorso Gli interventi in emergenza condotti in ambienti disastrati, rischiosi per l’uo-
mo e con tempi limitati sono di vitale importanza per operazioni antincendio, di
salvataggio o di tipo militare. L’utilizzo di robot al posto di operatori umani o
come supporto in tali condizioni pu` ridurre drasticamente i rischi possibili. Tali
o
scenari vengono spesso denominati Search and Rescue e sono il tema principale
della competizione RoboCup Rescue [TKT+ 00, HSI+ 99], in cui viene incoraggiato
lo sviluppo e la ricerca nell’ambito del soccorso robotico.
1
http://robocare.istc.cnr.it.
2
La RoboCup ` una competizione fra robot autonomi a livello mondiale, che si disputa annualmente,
e
col tentativo di promuovere l’intelligenza artificiale, la robotica e altri campi di ricerca correlati.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-23-2048.jpg)

![Capitolo 1. Robot per l’esplorazione autonoma 12
1.3 Moduli funzionali di un robot esploratore
In figura 1.3 ` rappresentata una schematizzazione che rappresenta bene le relazioni
e
tra i componenti funzionali di un robot idoneo all’esplorazione autonoma, presente in
[SN04]. Da questa si comprende immediatamente l’importanza di sensori e attuatori,
con i quali viene gestita l’acquisizione di informazioni e l’interazione con l’ambiente rea-
le. Mediante l’interpretazione dei dati grezzi provenienti dai sensori, vengono costruiti
modelli rappresentativi dell’ambiente (come ad esempio mappe) e ricavate informazioni
sulla posizione del robot all’interno di esso (localizzazione). In base alla strategia desi-
derata ad alto livello (obiettivi di missione), al fine di permettere al robot di raggiungere
l’obiettivo globale prefissato, i moduli di pianificazione provvedono a stabilire i compiti
da assegnare ai componenti di basso livello, come gli attuatori, in modo da garantire la
corretta navigazione del robot verso i vari target. Va notato che per svolgere attivit`
a
di locomozione autonoma ` necessario risolvere una grande variet` di problemi, come il
e a
controllo del movimento (motion control ), il superamento di ostacoli e il rilevamento di
situazioni critiche.
Knowledge, Mission
Data Base Commands
Localization “Position” Cognition
Map Building Global Map Path Planning
Environment Model Path
Local Map
Information Path
Extraction and Execution
Motion Control
Interpretation
Perception
Raw data Actuator Commands
Sensing Acting
Real World
Environment
Figura 1.3: Schematizzazione di un robot mobile
Nelle prossime sezioni tali componenti verranno descritti singolarmente, fornendo
una panoramica che aiuter` a comprendere concetti utilizzati nell’ambito di tutta la
a
tesi.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-26-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 13
1.3.1 Sensori e tecniche per l’esplorazione
Una delle funzioni pi` importanti funzionalit` di un sistema autonomo ` acquisire infor-
u a e
mazioni sull’ambiente che lo circonda, utilizzando misurazioni provenienti da vari sensori
ed estraendone informazioni significative. Esiste un’ampia variet` di sensori impiegati
a
nei robot mobili; alcuni misurano semplici valori come temperature esterne o velocit` di
a
rotazione dei motori. Altri, pi` sofisticati, possono essere usati per ricavare la posizione
u
del robot, ad esempio rispetto agli ostacoli o a punti di interesse per la sua missione.
Dato che il robot ` continuamente in movimento, frequentemente incontrer` caratte-
e a
ristiche dell’ambiente impreviste, per cui le funzionalit` di sensoristica sono alquanto
a
critiche. Inoltre, dato che ogni sensore acquisisce informazioni incerte sull’ambiente, so-
no necessari strumenti stocastici per mantenere limitate ed accettabili la rumorosit` dei
a
dati. Per una trattazione abbastanza completa sui sensori per robot mobili si consulti
[Eve95].
Nelle sezioni seguenti verranno elencati alcuni dei pi` importanti sensori e tecni-
u
che utilizzate per l’esplorazione e la navigazione; gran parte di essi sono presenti del
laboratorio SIED e installati sui robot utilizzati per gli esperimenti descritti in questa
tesi.
1.3.1.1 Odometria
L’odometria ` uno dei metodi pi` utilizzati per conoscere la posizione di robot mobili, in
e u
quanto fornisce una discreta precisione su brevi distanze, non ha alti costi di applicazione
ed ` facilmente integrabile con altri metodi di localizzazione che invece danno misure
e
pi` accurate.
u
L’idea di base della ricostruzione odometrica ` quello del calcolo della nuova posizione
e
del robot in base alla strada percorsa rispetto alla posizione precedente (dead-reckoning).
Il calcolo avviene tramite l’integrazione nel tempo dell’informazione sul movimento. Per
ricavare i valori da integrare, l’odometria utilizza degli encoder, attaccati agli assi delle
ruote o all’armatura del motore, che vanno a misurare la velocit` di rotazione delle ruote
a
e l’orientazione dello sterzo (basandosi sul principio che la rotazione compiuta da una
ruota pu` essere tradotta in spostamento lineare).
o
Questo metodo causa inevitabilmente l’accumularsi di errori, soprattutto di orien-
tazione che causano a loro volta errori in posizione, che crescono proporzionalmente
alla distanza percorsa. Gli errori dell’odometria possono essere sistematici (causati ad
esempio da diametri delle ruote diseguali o disallineate) o non sistematici (movimento
su terreno irregolare e slittamenti delle ruote).](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-27-2048.jpg)

![Capitolo 1. Robot per l’esplorazione autonoma 15
tipo di tecnica soffre molto dei fenomeni di riflessione (descritti al paragrafo 2.1.3) e ci`
o
dipende soprattutto dall’angolo con cui l’onda colpisce l’oggetto e dal materiale di cui
esso ` composto. In movimento tali fenomeni sono ancor pi` amplificati e causano una
e u
stima abbastanza grossolana della distanza dagli ostacoli. Numerosi aspetti riguardanti
l’esplorazione con il sonar e alcuni modelli probabilistici sono descritti in dettaglio in
[TBF05].
1.3.1.4 Laser scanner
I laser scanner, chiamati talvolta anche laser rangefinder, possono essere pensati come dei
piccoli sonar che utilizzano la luce invece del suono, per creare una mappa bidimensionale
degli ostacoli che si trovano in prossimit` del robot. L’accuratezza, i consumi energetici
a
ridotti e i costi sempre pi` contenuti di questi sensori li rendono preferibili rispetto a
u
tutti gli altri, per costruire mappe o localizzare il robot.
Range
massimo
Risoluzione
angolare
Area visibile
Range
minimo
Area non visibile
(a) Alcuni laser scanner (b) Parametri di un laser scanner
Figura 1.5: Laser scanner
Il principio di funzionamento ` abbastanza intuitivo; ad ogni scansione vengono emes-
e
si iterativamente dei raggi laser distanziati di un certo angolo, che dipende dalla risolu-
zione angolare del dispositivo, fino a ricoprire l’apertura massima dello scanner (Field
Of View). Per ogni emissione, si conosce la distanza e l’angolo rispetto al sensore, da
cui pu` essere ricavata la posizione dell’ostacolo rispetto alla sorgente di emissione.
o
I differenti tipi di laser scanner si differenziano essenzialmente in base alla risoluzio-
ne sulla distanza, risoluzione angolare, la frequenza di scansione e al range minimo e
massimo raggiungibile. Parametri tipici per questi sensori sono riportati in tabella 1.1.
Come per i sensori ad ultrasuoni, una fonte rilevante di errore ` la riflessione incoe-
e
rente dell’energia del laser. Con la luce questo accade quando essa colpisce una superficie
molto riflettente; ci` si verifica ad esempio con oggetti metallici, di legno lucido e, ov-
o
viamente, specchi. Inoltre, a differenza del sonar, i laser scanner non possono rilevare](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-29-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 16
Risoluzione angolare 0.3◦ -0.5◦
Field Of View 180◦ -240◦
Risoluzione sulla distanza 20 mm
Frequenza di scansione 10-20 KHz
Range minimo-massimo 20 mm - 70 m
Tabella 1.1: Parametri tipici di un laser scanner
materiali trasparenti come vetro, che talvolta pu` essere presente in quantit` significative
o a
in alcuni ambienti (come ad esempio i musei).
1.3.1.5 GPS
L’utilizzo di GPS per la localizzazione outdoor ` una soluzione abbastanza comune quan-
e
do non sono presenti altri riferimenti e non ` richiesta precisione elevatissima. Il problema
e
principale del sistema GPS ` dovuto al fatto che il ricevitore deve avere comunicazione
e
con almeno quattro satelliti, tre per la posizionamento e uno per correggere gli sfasa-
menti del clock. Considerando che le trasmissioni sono a bassissima potenza, ` richiesta
e
necessariamente una condizione di Line-Of-Sight con i satelliti. Di conseguenza, in spa-
zi ristretti come ambienti urbani circondati da edifici alti o foreste molto fitte, ` poco
e
probabile ricevere il segnale in modo affidabile. Ovviamente, anche la maggior parte
degli spazi indoor ` inadeguata per l’impiego di GPS e per tali motivazioni, esso appare
e
adeguato solo in progetti di robotica mobile in ampie aree aperte o per essere installato
su UAV.
1.3.1.6 Landmark
I landmark sono oggetti con caratteristiche distintive che il robot pu` riconoscere at-
o
traverso il suo sistema sensoriale, ad esempio mediante visione artificiale [BB82]. In
generale un landmark pu` avere una locazione fissa e nota a priori, in base al quale il
o
robot pu` stimare la sua posizione, e viene scelto in maniera tale da essere facilmente
o
distinguibile rispetto ad altri oggetti per forma o colore (ad esempio contrasta con lo
sfondo).
Esso pu` essere naturale, se ` un oggetto o una caratteristica gi` presente nell’am-
o e a
biente che si sta esplorando (come porte, lampade, ecc) o artificiale, se ` un marcatore che
e
deve essere posizionato, con il solo scopo di aiutare la navigazione del robot; per esempio
forme geometriche (linee, poligoni) che possono includere informazioni addizionali (ad
esempio sotto forma di codici a barre). Un vantaggio dei landmark artificiali rispetto a
quelli naturali ` che date le loro caratteristiche, note a priori, si possono progettare e
e
costruire sensori ad hoc per quella determinata applicazione.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-30-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 17
L’accuratezza di queste tecniche dipende soprattutto dalla precisione con cui i land-
mark possono essere riconosciuti (matching) e dall’assunzione che posizione e orientazio-
ne siano noti con una buona approssimazione, ad esempio tramite odometria, in modo
tale da diminuire lo spazio di ricerca.
Un esperimento interessante sul riconoscimento di landmark tramite visione artificiale
` riportato in [HLD07], mentre in [ZKNN07] vengono impiegati dei tag a radiofrequenza
e
(RFID) per stabilire dei punti di coordinamento per squadre di robot, con lo scopo di
suddividere in modo intelligente lo spazio di esplorazione dell’ambiente.
1.3.2 Localizzazione e mappe
La navigazione di un robot mobile nell’ambiente che si sta esplorando richiede la co-
struzione di una mappa; senza di essa il robot non pu` ricavare n´ la sua posizione n´
o e e
quella di eventuali ostacoli. Ad esempio ci` ` vero per i moderni navigatori basati sul
oe
sistema GPS; quest’ultimo fornisce la posizione del ricevitore nel mondo reale, ma senza
l’uso di una mappa questa informazione non pu` essere sfruttata adeguatamente per la
o
guida dell’autoveicolo fino alla destinazione. In problemi di complessit` pi` limitata, in
a u
cui l’ambiente ` gi` noto, il robot pu` essere istruito preventivamente mediante map-
e a o
pe metriche o topologiche. In generale, il problema di localizzazione con la conoscenza
della mappa dell’ambiente o la stima della mappa a partire dalla conoscenza pi` o me-
u
no precisa della posizione, sono stati affrontati e risolti utilizzando differenti approcci
[FBT99, TFBD00, BEFW97].
Ovviamente le capacit` di esplorazione autonoma hanno la possibilit` di liberare il
a a
robot dal vincolo di conoscere preventivamente l’ambiente, rendendo possibili applicazio-
ni anche in aree non note a priori. Inoltre, anche se accurate, le mappe fornite al robot
possono non coincidere esattamente3 con l’ambiente in ogni istante a causa di molteplici
fattori: si pensi alla presenza di oggetti e persone in movimento.
In questo tipo di problemi, occorre considerare che mentre il robot cerca di creare la
mappa, deve anche tenere conto della sua posizione, basandosi sulle percezioni dei suoi
sensori. Ne consegue che, per sviluppare un sistema in grado operare in scenari di esplo-
razione, ` necessario che l’acquisizione del modello dell’ambiente e la stima della posa
e
del robot vengano portate avanti concorrentemente (problema chiamato in letteratura
Simultaneous Localization and Mapping - SLAM [DWB06a, DWB06b]), dato che le due
procedure sono fortemente correlate tra loro. Chiaramente, i sensori giocano un ruolo
fondamentale in tutte le forme di localizzazione; ` proprio a causa dell’imprecisione e
e
dell’incompletezza di questi ultimi che la quasi totalit` degli approcci a questo problema
a
sono di natura probabilistica o statistica [CDNDW01, TFB98, SAY99].
3
Si pensi alle conseguenze che si hanno quando le mappe del proprio navigatore satellitare non sono
correttamente aggiornate!](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-31-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 18
Nei paragrafi seguenti verranno brevemente analizzate solo le tecniche principali per
la realizzazione di mappe (mapping), mentre verr` tralasciato il problema della loca-
a
lizzazione del robot rispetto all’ambiente, in quanto problema troppo specifico rispetto
alle argomentazioni di questa tesi (per una trattazione abbastanza completa si consulti
[TBF05]). Va comunque notato che ogni differente approccio per il mapping si presta
a rappresentare pi` o meno correttamente le diverse tipologie di ambienti (strutturati,
u
semistrutturati o destrutturati).
1.3.2.1 Feature maps
In generale, una mappa di un ambiente ` una lista di oggetti con associate, le loro
e
posizioni e propriet` (feature):
a
m = {m1 , m2 , . . . , mN } (1.1)
dove N ` il numero totale di oggetti.
e
Nelle feature maps, un generico elemento mn , contiene le propriet` della feature, con
a
associata la sua posizione geometrica. Spesso si tratta di mappe metriche, caratterizzate
con gli elementi che definiscono l’ambiente come linee, angoli, punti e parametrizzate
in funzione delle dimensioni, colore. In caso di ambienti strutturati (ad esempio un
ufficio), le feature possono essere estratte dalle misurazioni di sonar, laser scanner o da
sistemi di visione artificiale. In caso contrario, l’individuazione e il matching di feature
non ` sempre realizzabile e di conseguenza tali mappe non trovano molte applicazioni in
e
ambienti destrutturati (ad esempio un edificio dopo un crollo).
1.3.2.2 Occupancy grid
Nelle occupancy grid, l’ambiente ` suddiviso in una griglia pi` o meno accurata, dove
e u
ogni cella contiene un valore che rappresenta la probabilit` che essa sia occupata o meno
a
da un oggetto. Queste mappe possono essere rese pi` o meno dettagliate scegliendo la
u
risoluzione di ogni singola cella. Ovviamente, poich´ il numero di celle cresce il modo
e
quadratico con le dimensioni dell’ambiente da descrivere, lo spazio di memoria necessario
per descrivere delle mappe con precisione sufficiente spesso pu` essere molto grande.
o
Risultano particolarmente adatte per sensori sonar o laser, rappresentando uno stru-
mento valido per filtrare e quindi incrementare l’affidabilit` delle misure mediante pro-
a
babilit` condizionate. Tali mappe hanno il vantaggio di descrivere, oltre agli oggetti
a
presenti nell’ambiente, anche lo spazio libero, risultando adeguate alla navigazione di
robot mobili. Un esempio ` riportato in figura 1.6(a). Sempre in riferimento alla nota-
e
zione 1.1, l’elemento generico mn ` riferito ad una particolare posizione sulla mappa; ad
e
esempio nel caso bidimensionale ` pi` chiaro indicare mx,y anzich´ mn per esplicitare il
e u e
fatto che mx,y ` una propriet` di specifiche coordinate (x, y) del mondo reale.
e a](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-32-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 19
(a) Esempio di occupancy grid (b) Esempio di mappa topolo-
gica
Figura 1.6: Alcuni tipi di mappe
1.3.2.3 Mappe topologiche
La rappresentazione mediante mappe topologiche definisce una relazione diretta tra l’am-
biente e un grafo. Esse sono definite attraverso la struttura dell’ambiente che rappresen-
tano; ogni luogo ` caratterizzato in termini di unit` funzionali e topologiche (ad esempio
e a
una stanza o un corridoio) tra loro connesse (ad esempio mediante porte o scale). Nel
grafo che viene costruito, i nodi rappresentano i luoghi e gli archi le connessioni per
raggiungerli, risultando in una notazione molto compatta rispetto alle mappe metriche
e pi` gestibile computazionalmente (fig. 1.6(b)).
u
Tuttavia le mappe topologiche hanno anche alcuni svantaggi: in particolare sono
solitamente limitate agli ambienti che possono essere descritti per mezzo di semplici
forme geometriche. Gli ambienti reali solitamente sono complessi e quindi la lista delle
forme degli oggetti ` tipicamente incompleta. Un modo per aggirare questa limitazione `
e e
quella di utilizzare mappe ibride, che rappresentano alcune parti dell’ambiente per mezzo
di oggetti e altre utilizzando delle rappresentazioni sullo stile delle occupancy grid.
1.3.3 Navigazione
Per un robot mobile, i moduli di navigazione combinano tutti quelli visti precedentemen-
te (sensoristica, localizzazione, mapping), al fine di decidere passo passo la coordinazione
dei movimenti e quindi dei comandi da fornire agli attuatori. Oltre a garantire che il
robot segua il path scelto fino al target, la navigazione deve saper affrontare scenari
in cui gli ostacoli sono dinamici, la mappa ` incompleta e alcune azioni possono fallire
e
[SN04].
Le varie architetture di navigazione esistenti, suddividono spesso i task in globali e
locali. I primi sono visti come problemi di pianificazione a lungo termine, in cui viene
considerata l’intera rappresentazione dell’ambiente, rilassando alcuni vincoli (come ad
esempio l’esatta forma del robot); i secondi dipendono fortemente dalle letture in tempo](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-33-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 20
reale dei sensori e devono consentire al robot di evitare ostacoli (obstacle avoidance),
modulando opportunamente la sua traiettoria.
Spesso pianificazione e reazione sono visti come approcci opposti. In realt`, quando
a
applicate a sistemi fisici come i robot mobili, essi sono complementari e ognuno ` critico
e
per il successo dell’altro. Il problema di navigazione richiede l’esecuzione di un insieme
di azioni (o un piano) per raggiungere il target. Durante l’esecuzione, il robot deve
tuttavia reagire ad eventi imprevisti in modo tale da poter garantire il raggiungimento
dell’obiettivo globale. Senza reazione, lo sforzo della pianificazione non fornisce i risultati
sperati dato che il robot non raggiunger` fisicamente il goal, bloccandosi prima, mentre
a
senza pianificazione, le funzioni di reazione non riusciranno mai a guidare il robot verso
un obiettivo distante.
1.3.3.1 Pianificazione
Un componente importante per garantire al robot di raggiungere un determinato obiet-
tivo ` il path planning. In questo tipo di problemi, l’agente deve spostarsi da un punto di
e
partenza (start) ad un punto di arrivo (target), senza collidere con ostacoli dell’ambiente
circostante. Esso ` essenzialmente un problema di ricerca, in cui viene scelta una tra le
e
sequenze di configurazioni che portano il robot dallo start al target, possibilmente quella
che minimizza la lunghezza del cammino. Lo spazio di ricerca ` l’insieme di tutte le
e
possibili configurazioni del robot e la dimensione di questo insieme aumenta esponen-
zialmente con il numero di gradi di libert` del robot; la crescita rapida dello spazio di
a
ricerca ` una delle maggiori difficolt` nel path planning.
e a
Una prima distinzione tra path planner pu` essere fatta tra quelli deliberativi e reat-
o
tivi. La pianificazione deliberativa pu` essere usata nelle situazioni in cui si assumono
o
come noti a priori l’ambiente e la posizione del robot, generando, se esiste, una tra-
iettoria che consente di evitare gli ostacoli, eventualmente ottimizzando un opportuno
indice di prestazione. La pianificazione reattiva ` un requisito fondamentale per i robot
e
autonomi che passano ciclicamente dalla fase di pianificazione a quella di movimento
(fig. 1.3). Quelli pi` avanzati, cercano di adattare il percorso ai cambiamenti improvvisi
u
nell’ambiente. In generale, occorre combinare questi due tipi di approcci, utilizzando
un pianificatore deliberativo basato sulla mappa dell’ambiente disponibile e poi, quando
il robot sta inseguendo la traiettoria pianificata, utilizzare un pianificatore reattivo in
grado di evitare il contatto con ostacoli precedentemente ignoti, mediante tecniche di
obstacle avoidance.
I metodi utilizzati per il path planning possono essere classificati in base al tipo
di decomposizione effettuata sull’ambiente, trasformandolo dal dominio nel continuo a
quello discreto. I metodi principali sono quelli a roadmap, a decomposizione di celle e a
campi di potenziale [SN04, Doy95].](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-34-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 21
Gli approcci a roadmap cercano di stabilire la connettivit` da un insieme di configu-
a
razioni libere per il robot, per formare una rete di curve o linee unidimensionali chiamate
roadmap. La ricerca del path si riduce al problema di trovare una connessione tra i punti
start e target sulla roadmap, cercando quella ottima.
I metodi basati su decomposizione di celle sono ampiamente utilizzati e prevedono
di suddividere l’insieme delle configurazioni in regioni non sovrapposte, chiamate celle.
La relazione di adiacenza tra queste celle ` rappresentata da un grafo di connettivit`,
e a
in cui i nodi sono le celle libere e gli archi mostrano appunto l’adiacenza tra esse. In
questo grafo viene cercato il path, seguendo le celle libere dal punto di partenza a quello
di arrivo. Il problema principale ` che tutte le celle e il grafo di connettivit` devono
e a
essere costruiti, prima che il path venga trovato, e per alti gradi di libert` del robot, la
a
dimensione dello spazio di ricerca diventa rapidamente intrattabile.
Gli approcci a campi di potenziale utilizzano generalmente l’idea della presenza di un
potenziale repulsivo vicino agli ostacoli e attrattivo vicino all’obbiettivo. Il gradiente dei
potenziali guida il path lontano dagli ostacoli, mentre cerca di avvicinarlo all’obiettivo.
Lo svantaggio maggiore di questi metodi ` che spesso la pianificazione porta a dei minimi
e
locali, causando la presenza di soluzioni non complete.
1.4 Esplorazione autonoma
L’esplorazione in autonomia di un’area sconosciuta ` uno dei problemi fondamentali della
e
robotica mobile. Per la costruzione di un modello dell’ambiente consistente, il robot
deve essere in grado di esplorarlo efficientemente, individuando la posizione di ostacoli,
di oggetti e dello spazio libero, mediante l’utilizzo dei sensori e delle tecniche descritte al
paragrafo 1.3.1. L’esplorazione risulta necessaria in molte applicazioni; per la costruzione
della mappa il robot deve esplorare l’ambiente e la stessa cosa accade in scenari di Search
and Rescue, per trovare persone in situazioni di pericolo. Soprattutto per cercare un
punto di interesse in un ambiente non noto a priori, ` necessario effettuare esplorazione
e
cieca se non si hanno informazioni aggiuntive sulla localizzazione dell’oggetto da trovare,
procedendo praticamente per tentativi.
Una buona strategia di esplorazione dovrebbe essere efficiente, per coprire l’ambiente
velocemente, accurata, per consentire la costruzione di mappe consistenti e adattabile,
in grado da poter essere utilizzata in diversi tipi di ambiente (ad esempio in spazi aper-
ti come in uffici). Durante l’esplorazione quindi, si possono avere diversi obiettivi da
ottimizzare, come ad esempio massimizzare l’area ricoperta in un intervallo di tempo
[Yam98] o incrementare l’autonomia energetica del robot [MLLH06]. A tal fine risul-
tano determinanti le scelte, fatte ad ogni passo, con lo scopo di decidere il prossimo
target da esplorare e verso cui il robot deve spostarsi. Nella maggior parte degli approc-
ci [BMF+ 00, KPN, MLLH06], il target ` selezionato fra i punti di frontiera [Yam97],
e](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-35-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 22
che si trovano cio` sulla linea di confine tra lo spazio esplorato e quello non esplorato
e
(per un approfondimento al riguardo, si rimanda al paragrafo 5.1.2). Alcuni approcci, si
basano su wall-following [Mat92, XKC97], risultando validi solo in ambienti di limitata
complessit` strutturale, altri ancora sul riconoscimento di landmark [TK93].
a
La scelta della frontiera spesso viene effettuata tenendo in conto utilit` e costi del-
a
la stessa, in altri casi addirittura avviene casualmente (procedendo per random walk
[Thr95]). L’utilit` pu` essere stimata in base alla dimensione dell’area coperta dalla
a o
frontiera [SB03], mentre il costo pu` considerare gli spostamenti o le rotazioni necessarie
o
al robot per raggiungerla [Yam97, MTK]. Tipicamente vengono utilizzate delle strategie
greedy, selezionando il target in modo che l’area potenziale ricoperta sia massima e con
minor costo. In altri casi si considera la quantit` di informazione ottenibile da differenti
a
viewpoint (problema chiamato next-best-view [GBL01]).
1.5 Simulatori
Alla complessit` di un robot mobile contribuisce sicuramente l’alto numero di sensori
a
presenti e la capacit` di movimento e interazione nell’ambiente. Per uno sviluppatore,
a
la possibilit` di testare i propri algoritmi in un sistema di simulazione, comporta sicu-
a
ramente molti vantaggi in termini di costi e tempi di implementazione. Per non parlare
delle opportunit` che nascono in ambito multi-robot, in quanto ` possibile avere con-
a e
temporaneamente presenti diverse tipologie di robot, considerando che tale scenario non
sempre ` realizzabile nella pratica.
e
Durante la realizzazione della tesi ` stato possibile vederne in dettaglio sostanzial-
e
mente due: l’accoppiata Player/Stage [GVS+ 01] e USARsim [WLG03]. Essi verranno
brevemente descritti nelle sezioni seguenti.
1.5.1 Player/Stage/Gazebo
La piattaforma Player/Stage ` conseguenza di un progetto open-source, iniziato nel 2000
e
ad opera di Brian Gerkey, Richard Vaughan, Andrew Howard e risulta una delle interfac-
ce pi` utilizzate dalle universit` e aziende che si occupano di robotica mobile. Essa pu`
u a o
essere considerata come due componenti indipendenti di un ambiente di simulazione.
Player ha un’architettura che consente di controllare con un paradigma client/server
il robot e i suoi sensori/attuatori, mediante messaggi scambiati tramite TCP/IP. Esso
fornisce un’interfaccia, indipendente dal linguaggio di programmazione, nei confronti di
dispositivi hardware, come laser scanner e sonar, grazie ai numerosi driver sviluppati
dalla comunit`.
a
Stage invece pu` essere considerato come una plugin per Player e permette di si-
o
mulare un ambiente multi-agente con una rappresentazione bidimensionale, utilizzando
ad esempio da una mappa bitmap. Esso comprende un insieme di dispositivi che rende](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-36-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 23
disponibili a Player e che possono essere assemblati per costituire un robot personaliz-
zato: questa particolarit` permette di sperimentare in simulazione dispositivi che non
a
sono disponibili sul robot nella realt`. Inoltre i client solitamente non percepiscono la
a
differenza tra i dispositivi reali e quelli equivalenti simulati da Stage e ci` permette di
o
passare semplicemente, e spesso senza modifiche, dal mondo reale a quello simulato e
viceversa.
`
E presente anche un’estensione (Gazebo), che consente di ampliare le possibilit` di
a
Player ad ambienti tridimensionali.
(a) Player/Stage (b) USARsim
Figura 1.7: Simulatori per robot mobili
1.5.2 USARsim
USARsim (Unified System for Automation and Robot Simulation) ` un simulatore ad
e
elevato realismo, orientato agli ambienti tridimensionali e soprattutto a scenari di soc-
corso robotico, in particolare in ambito Urban Search And Rescue (USAR). Esso `
e
basato sull’engine grafico Unreal2 del videogame Unreal Tournament 2004 di Epic Ga-
mes e sull’API GameBots, per fornire un buon rendering grafico e allo stesso tempo una
modellazione fisica realistica.
In USARsim sono presenti numerose riproduzioni di ambienti con disastri, modelli di
robot (sia commerciali che sperimentali) e sensori. Inoltre, ` possibile costruire il proprio
e
ambiente di simulazione, controllando tutto tramite una API basata su socket per testare
gli algoritmi e interfacce utente, senza necessit` di programmazione addizionale.
a
Esso ` inoltre il simulatore di riferimento utilizzato nella competizione RoboCup
e
Rescue Virtual [TKT+ 00], data la sua capacit` di riprodurre realmente scenari con
a
differente grado di destrutturazione, per valutare le prestazioni di squadre di robot nella
cooperazione, ricerca di vittime e mapping dell’ambiente.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-37-2048.jpg)
![Capitolo 1. Robot per l’esplorazione autonoma 24
1.6 Il framework SPQR-RDK
La piattaforma SPQR-RDK (Software Per Qualunque Robot-Robot Development Kit)
` stata progettata e successivamente estesa, all’interno del Dipartimento di Informati-
e
ca e Sistemistica “Antonio Ruberti” (DIS), dell’Universit` di Roma “Sapienza”. Essa
a
permette una semplicit` di sviluppo e debugging, con al contempo buone capacit` di
a a
modularizzazione dei nuovi componenti che gradualmente vengono implementati. Essa `
e
composta da un insieme di librerie software, driver di basso livello, moduli per compor-
tamenti ad alto livello, interfacce verso gli agenti robotici ed utility grafiche di ausilio per
l’operatore. Inoltre, come il nome stesso indica, ` possibile impiegarla in diversi sistemi
e
robotici e soprattutto nella robotica mobile. Attualmente l’SPQR-RDK viene impiegato
nella competizioni Robocup Soccer e Rescue, ed ` possibile interfacciarlo a vari tipi di
e
robot (dai Pioneer della ActiveMedia Robotics agli Aibo della Sony).
SPQR-RDK ` sviluppato interamente in C++ ed ` disponibile per piattaforme
e e
Unix (Linux, Mac OS X). Per una descrizione generale si consulti [FGI05]. Nei pa-
ragrafi seguenti viene illustrata la struttura del framework, mettendone in evidenza le
caratteristiche principali.
1.6.1 Agenti e moduli
In SPQR-RDK, l’entit` principale ` l’agente, un processo software che rappresenta il
a e
robot. In esso possono essere caricati dinamicamente moduli, ognuno eseguito nel pro-
prio thread di esecuzione. La possibilit` di avere un ambiente multi-thread, permette di
a
eseguire differenti task concorrentemente e di creare gerarchie produttore-consumatore.
Ad esempio, un generico agente, pu` avere un modulo dedicato al ricevere i dati prove-
o
nienti da odometria e laser scanner, un modulo che con tali informazioni ha il compito
di eseguire lo scan-matching per stimare la posizione dell’agente e infine un modulo che
utilizzando tale stima e le scansioni del laser costruisce la mappa dell’ambiente.
La configurazione di un agente e dei suoi moduli ` abbastanza intuitiva, in quanto `
e e
sufficiente scrivere un file di configurazione XML-based che contiene l’elenco dei moduli
impiegati, settando opportunamente i relativi parametri.
1.6.2 Repository
Lo scambio di dati tra moduli avviene per mezzo di una memoria condivisa, denominata
repository. Nel repository si trovano tutte le propriet` che un modulo condivide con gli
a
altri. Esse sono organizzate in una struttura gerarchica ad albero, individuate tramite
uno specifico URL4 . Le connessioni di dati tra moduli (ad esempio input-output) ven-
gono realizzate collegando le propriet` di un modulo a quella dell’altro, attraverso una
a
4
Ad esempio, la coda contenente i dati provenienti dal laser scanner, ` individuata dall’URL:
e
rdk://agent/laserModule/laserQueue.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-38-2048.jpg)

![Capitolo 2
Localizzazione basata su
dispositivi wireless
La localizzazione di un dispositivo all’interno di WSN ` un aspetto sempre pi` rilevante
e u
[MFA07], in quanto consente di associare alla misurazione il luogo in cui si ` verificata.
e
Ovviamente la precisione con cui la posizione viene rilevata dipende dallo specifico con-
testo applicativo: ad esempio per localizzare persone all’interno di un ufficio ` sufficiente
e
sapere in quale stanza si trovano, mentre in uno scenario di monitoraggio di merci in un
magazzino si potrebbe essere interessati in quale particolare imballaggio ` stata superata
e
una soglia di temperatura critica. L’informazione sulla posizione ` importante anche in
e
fasi di amministrazione e configurazione, considerato l’elevato numero di nodi che la rete
pu` contenere1 .
o
I differenti metodi di localizzazione si differenziano oltre per la precisione che riesco-
no a raggiungere, anche per la complessit` richiesta per implementarli. Alcuni di questi
a
fanno delle assunzioni sulla struttura dell’ambiente (indoor/outdoor), sulla configurazio-
ne della rete (ad esempio a griglia) o sulla presenza di nodi con posizione nota a priori
(detti beacon).
Si pu` facilmente immaginare come, l’aggiunta di informazioni sulla localizzazione
o
utilizzando una WSN, possa essere agevolmente integrata su una squadra di robot mobili,
fornendo indicazioni sulla posizione che possono risultare utili sia in fase di creazione
di una mappa globale, sia per coordinare l’esplorazione dell’ambiente da parte della
squadra. In questo modo, ogni robot, pu` avere una visione globale del problema,
o
riuscendo ad evitare azioni che non creano vantaggio per il raggiungimento dell’obiettivo,
come ad esempio visitare una zona gi` esplorata.
a
Lo scopo principale di questo capitolo, ` quello di mostrare lo stato dell’arte nei
e
metodi di localizzazione wireless, in particolar modo utilizzando segnali radio. Lo studio
1
In casi particolari, una WSN, pu` essere composta da diverse migliaia di nodi
o
27](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-41-2048.jpg)


![Capitolo 2. Localizzazione basata su dispositivi wireless 30
si chiama attenuazione dello spazio libero, l’equazione 2.1 si trasforma in:
Ptx · Gtx · Grx
Prx = , (2.2)
Asl
detta anche equazione di Friis. Solitamente le grandezze in sono espresse in decibel, per
cui la 2.2 diventa:
Prx [ dBm] = Ptx [ dBm] + Gtx [ dB] + Grx [ dB] − Asl [ dB].
L’equazione di Friis per l’attenuazione dello spazio libero mostra che la potenza in
ricezione decresce con il quadrato della distanza, ovvero di 20 dB/decade. Ovviamente
se le condizioni di visibilit` tra trasmettitore e ricevitore vengono a mancare, la potenza
a
del segnale ricevuto ` significativamente minore di quanto l’equazione per l’attenua-
e
zione dello spazio libero indica. Inoltre, non necessariamente essa fornisce una buona
approssimazione anche in condizioni di LoS [Rap01].
2.1.2 Assorbimento
In qualsiasi sistema di comunicazione, il segnale si propaga in un mezzo trasmissivo.
Nel caso di sistemi wireless terrestri il mezzo ` principalmente l’atmosfera e, in piccola
e
misura, materiali come vetro, calcestruzzo, legno, ecc. In seguito alle interazioni con
essi, il segnale perde parte della sua energia per ogni unit` di distanza in cui si propaga.
a
Pertanto, l’assorbimento provoca una diminuzione di potenza proporzionale a γ −d , dove
d ` la distanza e γ ` una costante che dipende dalle propriet` del mezzo e dalla frequenza.
e e a
Ragionando in db, questo significa che la perdita di segnale ` lineare con la distanza.
e
L’assorbimento ` particolarmente alto per frequenze oltre i 10 GHz; in questa situa-
e
zione, a causa dell’atmosfera, esso diventa comparabile all’attenuazione, specialmente
durante piogge e con distanze considerevoli. Con le frequenze usate nella maggior parte
dei sistemi di comunicazione wireless (al di sotto dei 10 GHz), l’assorbimento atmosferico
` quasi trascurabile per distanze entro i 10 km.
e
2.1.3 Rifrazione
Il fenomeno di rifrazione si verifica quando l’onda incontra un ostacolo con dimensioni
maggiori della lunghezza d’onda. La parte di essa che non ` riflessa perde parte della sua
e
energia in assorbimento e ci` che rimane riesce ad attraversare il materiale riflettente.
o
Nelle comunicazioni terrestri le onde sono riflesse dal terreno, producendo due percorsi
tra il trasmettitore e il ricevitore, come mostrato in figura 2.1; il piano di incidenza `
e
definito come il piano contenente il raggio incidente e quello riflesso, mentre l’angolo
di incidenza α ` l’angolo tra la superficie riflettente e il raggio incidente. Il segnale al
e
ricevitore arriva quindi come due componenti, con differente fase, che nel caso peggiore](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-44-2048.jpg)

![Capitolo 2. Localizzazione basata su dispositivi wireless 32
all’area in cui il segnale procede quasi linearmente. La potenza del campo generato dalle
onde secondarie ` inferiore rispetto a quello delle onde primarie; in pratica quest’ultime
e
possono essere trascurate se esiste una condizione di LoS tra il trasmettitore e il ricevito-
re. Il fenomeno della diffrazione viene sfruttato, ad esempio, per realizzare comunicazioni
radio oltre le montagne, quando un path LoS non ` disponibile; ovviamente la potenza
e
di trasmissione dovr` essere molto maggiore rispetto ad una trasmissione LoS.
a
Figura 2.2: Fenomeno di diffrazione
2.1.6 Multipath
La conseguenza diretta di tutti i fenomeni citati precedentemente ` il multipath. Tale
e
effetto si verifica in conseguenza agli effetti di riflessione, diffrazione e scattering delle
onde nell’ambiente, che giungono al ricevitore come somma delle copie delle onde stesse.
Questo fatto pu` essere determinato, per esempio, nel caso delle trasmissioni tra cellulari,
o
dal fatto che il trasmettitore o il ricevitore si spostano continuamente costringendo le
onde elettromagnetiche ad effettuare percorsi continuamente variabili con attenuazioni
quindi diverse.
Il risultato pi` rilevante del multipath ` il fading, ovvero il fatto che molteplici copie
u e
del segnale arrivano sovrapposte al ricevitore, con differente fase, ritardo e attenuazione,
rendendo possibile la somma distruttiva delle stesse e causando interferenza intersimbolo.
Il segnale ricevuto ` spesso modellato con l’effetto combinato di slow e fast fading.
e
La componente di slow fading descrive l’attenuazione e l’assorbimento del segnale prima
dell’arrivo al ricevitore; solitamente ha una distribuzione lognormale. Il fast fading
modella invece gli effetti dovuti al multipath. Se esiste almeno un percorso dominante
in condizioni di LOS, quest’ultimo viene rappresentato con una distribuzione di Rician,
altrimenti viene utilizzata la distribuzione di Rayleigh quando tale condizione non si
verifica.
Il fading inoltre, pu` essere selective o flat, in base al fatto che tale fenomeno interessi
o
particolari frequenze oppure si verifichi uniformemente su tutto lo spettro. Maggiori
dettagli sul fading possono essere trovati in [Rap01, Sey00].](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-46-2048.jpg)
![Capitolo 2. Localizzazione basata su dispositivi wireless 33
2.2 Modelli di propagazione
La predizione della propagazione delle onde radio ` molto utile in attivit` come link bud-
e a
geting, cell planning e appunto la localizzazione. I modelli di propagazione sono utilizzati
per prevedere le propriet` delle onde che si propagano, la qualit` del segnale ricevuto
a a
a `
e la sua variabilit`. E possibile inoltre predire polarizzazione, dispersione temporale e
selettivit` in frequenza.
a
Gli aspetti teorici menzionati nei paragrafi precedenti possono essere tenuti da conto
in vari livelli di astrazione, in base alla quantit` di informazioni disponibili sull’am-
a
biente e all’accuratezza richiesta dal modello. Per esempio, durante la pianificazione
di una comunicazione satellitare o in generale di collegamenti estesi su decine di chilo-
metri, una buona precisione ` spesso ottenuta considerando l’attenuazione (path-loss),
e
l’assorbimento e la riflessione della terra. Diversamente, in aree urbane, riflessione e dif-
frazione causati dagli edifici e lo scattering provocato ad esempio da alberi, hanno una
forte influenza sulla propagazione del segnale. In base alle informazioni sull’ambiente
che abbiamo a disposizione possiamo tra tre tipi di modelli:
Empirici Si basano principalmente su statistiche derivanti da misurazioni e su pochi
parametri. Sono abbastanza semplici e non molto accurati. In generale ` possibile
e
applicarli anche in ambienti differenti.
Deterministici Sono realizzati ad-hoc per un particolare ambiente e richiedono un’e-
norme quantit` di dati geometrici su di esso. Spesso sono computazionalmente
a
molto costosi anche se abbastanza accurati.
Semi-deterministici Basati su modelli empirici, considerando anche aspetti determi-
nistici.
In ambienti urbani, uno dei modelli pi` utilizzati, ` quello di Okumura-Hata [Sau00].
u e
Esso include un insieme di curve che indicano il path-loss, prendendo in considerazione
l’attenuazione e un fattore di correzione. Quest’ultimo ` ricavato da una funzione della
e
distanza e della frequenza del segnale. Tale modello ` applicabile quando le frequenze di
e
trasmissione sono comprese tra i 150 e i 1500 MHz, con distanze tra 1 e 10 chilometri.
In ambienti indoor le distanze che separano il trasmettitore e il ricevitore sono molto
minori (nell’ordine dei 100 metri) ma i fenomeni fisici visti precedentemente si verificano
con molta pi` variabilit`. Il tipo di edificio, i suoi materiali da costruzione, le posizioni
u a
delle antenne, possono influenzare in modo rilevante il path-loss. In tali ambienti risul-
tano interessanti l’ITU Model for Indoor Attenuation e il Log-Normal Shadowing Model
che approfondiremo nelle sezioni seguenti.
Essi si basano sul principio generico, descritto dall’equazione di Friis (equazione 2.2),
per cui la potenza del segnale in ricezione decresce proporzionalmente a d−np , sia in](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-47-2048.jpg)
![Capitolo 2. Localizzazione basata su dispositivi wireless 34
Frequenza Abitazione Ufficio Area commerciale
900 MHz - 33 20
1.2 GHz - 32 22
1.3 GHz - 32 22
1.8 GHz 28 30 22
4 GHz - 28 22
5.2 GHz - 31 -
Tabella 2.1: Valori del parametro N nell’ITU Model
Frequenza Numero di piani Abitazione Ufficio Area commerciale
900 MHz 1 - 9 -
900 MHz 2 - 19 -
900 MHz 3 - 24 -
1.8 GHz n 4n 15+4(n-1) 6+3(n-1)
2.0 GHz n 4n 15+4(n-1) 6+3(n-1)
5.2 GHz 1 - 16 -
Tabella 2.2: Valori del parametro Pf (n) nell’ITU Model
ambienti indoor che outdoor, dove d ` la distanza tra trasmettitore e ricevitore, mentre
e
np ` detto esponente di path-loss ed assume valori tipicamente tra 2 e 44 . Il path-loss
e
alla distanza d (P L(d)[ dB]) ` modellato come:
e
d
P L(d) = P0 − 10np log , (2.3)
d0
dove P0 [ dB] ` la potenza ricevuta alla distanza di riferimento d0 [ m].
e
ITU Model for Indoor Attenuation
L’ITU Indoor Propagation Model [IR01], ` un modello di propagazione del segnale che
e
stima il path-loss dentro un edificio delimitato da muri di qualsiasi forma e materiale.
Esso prende in considerazione anche l’attenuazione fra diversi piani dell’edificio (fino a
3) ed ` adatto per segnali a frequenze comprese tra i 900 MHz e i 5.2 GHz. L’equazione
e
caratteristica del modello ` la seguente:
e
L = 20 log f + N log d + Pf (n) − 28,
dove L ` l’attenuazione totale [dB], f ` la frequenza di trasmissione [MHz], N ` il
e e e
coefficiente di perdita di potenza con la distanza, d ` la distanza [m], n ` il numero
e e
di piani che separano trasmettitore e ricevitore e Pf (n) ` il fattore di penetrazione del
e
piano. N e Pf (n) sono ricavati empiricamente; alcuni valori sono elencati nelle tabelle
2.1 e 2.2.
4
np = 2 nello spazio libero e maggiore di 2 in presenza di ostruzioni](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-48-2048.jpg)
![Capitolo 2. Localizzazione basata su dispositivi wireless 35
Ambiente Frequenza 10γ σ
Negozio 914 MHz 22 8.7
Alimentari 914 MHz 18 5.2
Ufficio con muri spessi 1.5 GHz 30 7
Ufficio con muri 900 MHz 24 9.6
Ufficio con muri 1.9 GHz 26 14.1
Tessile o chimico 1.3 GHz 20 3.0
Tessile o chimico 4 GHz 21 7.0-9.7
Metallico 1.3 GHz 16 5.8
Metallico 1.3 GHz 33 6.8
Tabella 2.3: Coefficienti del Log-Distance Path-Loss Model
Log-Normal Shadowing Model
Il Log-Normal Shadowing Model ` un modello di propagazione del segnale radio che
e
predice l’attenuazione che il segnale incontra all’interno di un edificio, correlata alla
distanza. Esso ` descritto in dettaglio in [Rap01]. L’equazione da cui si ricava il path-loss
e
` la seguente:
e
d
L = L0 + 10γlog 10 + Xg ,
d0
in cui L ` il path-loss totale all’interno dell’edificio [dB], L0 ` il path-loss alla distanza
e e
d0 [dB], d ` la distanza che separa trasmettitore e ricevitore [m], d0 ` la distanza di
e e
riferimento [m], γ ` l’esponente di path-loss e Xg ` una variabile casuale gaussiana a
e e
media nulla e varianza σ 2 , relativa ai fenomeni di fading (shadow fading). Anche questi
questi coefficienti sono ricavati empiricamente; alcuni loro valori sono elencati in tabella
2.3.
2.3 Il processo di localizzazione
La localizzazione ` un processo mediante il quale i nodi determinano la loro posizione.
e
In termini semplici, la localizzazione ` un meccanismo per scoprire le relazioni spaziali
e
tra oggetti. I differenti approcci scelti in letteratura differiscono dal punto di vista delle
assunzioni fatte sulle capacit` della rete e dei nodi utilizzati. Una lista dettagliata di
a
assunzioni possibili, seppur non esaustiva, comprende assunzioni sul tipo di hardware
disponibile, modelli di propagazione del segnale, requisiti energetici e di temporizzazione,
tipo di ambiente (indoor o outdoor), densit` di nodi beacon, precisione necessaria e
a
mobilit` dei nodi. In particolare, in condizioni di mobilit`, possono presentarsi quattro
a a
differenti scenari, in base al fatto che i nodi o i beacon hanno la possibilit` di spostarsi.
a
Nel seguito verranno presentati alcuni tra pi` rilevanti approcci al problema della
u
localizzazione, raggruppandoli in due principali categorie: i metodi di localizzazione
range-based e range-free.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-49-2048.jpg)

![Capitolo 2. Localizzazione basata su dispositivi wireless 37
(x2,y2)
(x1,y1)
d1 d 2
(x,y)
d3
(x3,y3)
Figura 2.3: Il procedimento di trilaterazione
mobile ad altri due nodi. Se la posizione dei quest’ultimi ` nota, ` possibile utilizzare la
e e
triangolazione per determinare la posizione dell’unit` mobile. Se sono disponibili pi` di
a u
tre misurazioni di angoli, esse non necessariamente sono compatibili a causa di possibili
errori e perci` devono essere applicate delle medie complicate per ottenere la posizione
o
[NN03].
Un approccio comune per misurare l’AOA ` utilizzare un array di antenne e ci` lo
e o
rende quasi inapplicabile nelle WSN, a causa del suo costo e della sua complessit`.
a
2.4.3 Received Signal Strenght
Una possibilit` per acquisire informazioni sulla distanza ` correlarla alla potenza del
a e
segnale ricevuto, denominata Received Signal Strenght (RSS). L’idea fondamentale die-
tro questo approccio ` che la potenza di trasmissione Ptx influisce direttamente sulla
e
potenza di ricezione Prx . Secondo l’equazione 2.1, Prx varia in modo quadratico con la
distanza dal trasmettitore r.
Ovviamente questo ragionamento ` corretto nelle condizioni ideali di LoS tra tra-
e
smettitore e ricevitore, nel vuoto e in assenza di fenomeni come rifrazione, diffrazione e
multipath. In scenari reali, e in particolar modo in ambienti indoor, l’andamento rea-
le dell’equazione 2.1 non ` applicabile direttamente, in quanto il RSS ` influenzato da
e e
molteplici fattori:
Variabilit` del trasmettitore Differenti tipi di trasmettitori si comportano differen-
a
temente, anche se configurati nello stesso modo. In pratica, questo significa che
quando un trasmettitore ` configurato per inviare dati ad un livello di potenza di
e
p dBm, il valore reale non sar` esattamente uguale a quanto impostato. Questo
a
pu` alterare il RSS in ricezione e portare pertanto a stime inaccurate.
o](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-51-2048.jpg)
![Capitolo 2. Localizzazione basata su dispositivi wireless 38
Variabilit` del ricevitore La sensibilit` del ricevitore, su diversi circuiti radio ` dif-
a a e
ferente. In pratica, questo significa che il RSS misurato su pi` tipi di ricevitori
u
pu` non coincidere, anche se tutti gli altri parametri che lo influenzano rimangono
o
costanti.
Orientamento dell’antenna Ogni tipo di antenna ha il proprio pattern di radiazione
e anche se essa idealmente ` isotropa, nella realt` il suo guadagno non sar` uni-
e a a
forme. Ci` significa che alla medesima distanza, modificando l’orientamento del
o
dispositivo di trasmissione o ricezione, la misurazione del RSS sar` differente.
a
Multipath fading Come descritto al paragrafo 2.1.6, in ambienti indoor, il segnale tra-
smesso viene riflesso dopo aver colpito muri o altri oggetti. Sia il segnale originale
che quello riflesso raggiungono il ricevitore quasi allo stesso istante, considerata la
velocit` di propagazione pari a quella della luce. Come risultato di questo, il RSS
a
viene calcolato per entrambi i segnali dato che essi non sono distinguibili.
Interferenze La presenza di altri campi elettromagnetici generati da altre fonti pu`
o
ampliare o attenuare il segnale e di conseguenza influire sul RSS.
In molte applicazioni, tali effetti, possono degradare la bont` della misurazione fa-
a
cendo ottenere un’alta varianza ed una bassa entropia sui dati rilevati. Spesso quindi,
correlare la potenza del segnale ricevuto alla distanza e, successivamente, alla posizione,
richiede la progettazione di sistemi che tengano conto della rumorosit` del RSS.
a
Il fattore positivo negli algoritmi che utilizzano il RSS ` il basso costo e complessit`;
e a
come vedremo al capitolo 3, nello standard IEEE 802.15.4 sono previste delle primitive
del livello fisico che permettono di estrarre il valore del RSS su ogni pacchetto ricevuto.
In questo modo ` possibile implementare algoritmi di localizzazione su qualsiasi tipo di
e
nodo compliant con lo standard, senza la necessit` di hardware costosi.
a
In letteratura, esistono molti approcci basati sulle considerazioni fatte, tra cui prin-
cipalmente [SHS01, PHP+ 03, BGGT07, SKOM06].
2.4.3.1 RSS fingerprinting
Alcuni metodi di localizzazione non impiegano il RSS per ricavarne informazioni relative
distanza; l’idea ` quella di identificare una locazione sulla base della sua impronta RSS
e
(RSS fingerprint) rispetto a diversi nodi beacon, sotto l’assunzione che essa ` univoca
e
per tutte le posizioni dell’ambiente in esame. Generalmente, un’impronta I ` associata
e
alle informazioni sulla posizione P , costruendo una tupla < I, P > che viene inserita in
un database durante una prima fase off-line, denominata RSS profiling. La dimensione
delle coordinate reali nella tupla pu` variare da 1 a 5, considerando uno spazio tridimen-
o
sionale e due variabili di orientamento. Ad esempio, le informazioni sulla posizione di](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-52-2048.jpg)
![Capitolo 2. Localizzazione basata su dispositivi wireless 39
un sistema bidimensionale con orientamento, possono essere rappresentate dalla tripletta
P = {(x, y, o)|x, y ∈ R2 , d ∈ {Nord,Est,Sud,Ovest}}.
Nonostante il RSS risulti molto pi` dipendente dalla posizione, rispetto al SNR, es-
u
so pu` variare nel tempo rispetto al medesimo beacon e deve essere considerato come
o
una variabile casuale; possono essere utilizzate statistiche descrittive, approssimando
la distribuzione delle misurazioni, oppure mantenendo tutti i dati. Indipendentemente
dall’approccio scelto, l’impronta RSS di una determinata posizione conterr` un vettore
a
I = {RSS1 , RSS2 , ..., RSSn }, dove n dipende dal numero di beacon considerati. Ovvia-
mente, il numero di campioni raccolti per rappresentare correttamente la locazione deve
essere adeguato all’ambiente, al fine di eliminare eventuali mismatch nell’algoritmo che
effettuer` la corrispondenza. In figura 2.4 ` possibile osservare un ambiente in cui sono
a e
state effettuate misurazioni di impronte RSS (RADAR [BP00]).
Wireless Access Point
RSS ngerprint
Figura 2.4: Impronte RSS nel sistema RADAR [BP00]
Dopo la fase di profiling, il problema di localizzazione entra nella fase on-line, in cui
l’impronta RSS del nodo viene campionata a intervalli regolari e se ne cerca l’eventuale
corrispondenza nel database costruito. Esistono vari algoritmi per trovare tali corrispon-
denze, alcuni deterministici basati su reti neurali o classificatori nearest neighbour, altri
probabilistici che impiegano l’inferenza bayesiana. Ad esempio la soluzione descritta
in [BP00] utilizza la metrica definita nearest neighbour in signal space (NNSS) che usa
essenzialmente la distanza euclidea.
Come si pu` comprendere, questa classe algoritmi richiede molto tempo per la fase
o
di profiling e una modifica nella configurazione dei beacon comporta la ripetizione di](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-53-2048.jpg)
![Capitolo 2. Localizzazione basata su dispositivi wireless 40
tutte le misurazioni. Risultano tuttavia molto robusti rispetto ai fenomeni che di soli-
to influenzano il RSS, soprattutto indoor. Essi sono utilizzati con successo in scenari
abbastanza statici, come la localizzazione in uffici. Un altro sistema basato su quanto
appena descritto ` Motetrack [LW04].
e
2.5 Metodi di localizzazione range-free
L’approccio alla localizzazione range-free non si occupa di calcolare le distanze basandosi
sulla potenza del segnale ricevuto o altre caratteristiche del segnale come tempo, angolo,
ecc. Piuttosto, la posizione dei nodi viene calcolata sfruttando delle propriet` topologiche
a
della rete, ad esempio tenendo presente il numero di hop tra trasmettitore e ricevitore
oppure considerando informazioni sulla connettivit` con i nodi vicini [SRZF07].
a
Un semplice algoritmo range-free ` quello basato sul centroide [BHE00]; il nodo che
e
vuole conoscere la sua posizione calcola il centroide delle posizioni inviate dai beacon
che lo circondano. Esso genera un errore sulla localizzazione che ovviamente dipende
dalla configurazione dei beacon e dalla posizione del nodo.
Un approccio interessante ` APIT (Approximate Point In Triangulation), descritto
e
in [HHB+ 03]. Esso richiede che una piccola percentuale di dispositivi conosca la sua
posizione e sia equipaggiato con un trasmettitore ad alta potenza. Ogni nodo stima se
si trova all’interno di una regione triangolare tra i beacon (fig. 2.5(a)); la presenza di un
nodo dentro o fuori queste aree permette di restringere l’area in cui esso potenzialmente
risiede. Utilizzando di volta in volta combinazioni di tre beacon, la precisione sulla
localizzazione aumenta ad ogni iterazione.
(a) APIT [HHB+ 03] (b) DV-HOP [NN01]
Figura 2.5: Alcuni approcci di localizzazione range-free
Un altro algoritmo di localizzazione range-free ` DV-HOP [NN01] che impiega un
e
numero costante di beacon ed ` basato su un’euristica che mette in relazione la distanza
e
con il numero di hop in reti isotrope 2.5(b). Sostanzialmente ogni nodo calcola il numero](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-54-2048.jpg)

![Capitolo 3
Lo standard ZigBee
Ad oggi, la realizzazione di Personal Area Network (PAN) basate su protocolli wireless,
sta riscontrando notevole interesse, sia in ambito accademico che industriale. Nono-
stante vi siano molteplici standard e protocolli gi` consolidati ed idonei a questo scopo
a
come Wi-Fi e Bluetooth, esistono tuttavia alcuni scenari applicativi in cui sono richieste
funzionalit` aggiuntive al trasferimento dati. Si pensi ad esempio al monitoraggio di
a
componenti meccaniche in movimento in un’industria, al fine di misurare alcune gran-
dezze fisiche di interesse, come ad esempio accelerazioni e temperature. Una prima
idea potrebbe essere quella di impiegare dei sensori, integrati in nodi basati su Wi-Fi,
collocati sulle parti da monitorare; sorgono immediatamente alcuni dubbi, sia su come
alimentare i nodi a lungo termine (dato il consumo energetico non indifferente di tali
dispositivi non ` praticabile l’impiego di batterie, almeno di ridotte dimensioni), sia in
e
che modo organizzare la rete dal punto di vista gerarchico, per l’aggregazione dei dati.
Tali problematiche sono tra quelle principali per cui sono state introdotte le Wireless
Sensor Network (WSN) [SACO06] e a cui appunto ZigBee1 appartiene.
In questo capitolo verr` illustrata a grandi linee la struttura dello standard, focaliz-
a
zando l’attenzione sulle funzionalit` dello stack che sono risultate di interesse per nella
a
valutazione e la successiva implementazione delle applicazioni. Tale studio ha permesso
di avere le prime indicazioni da cui partire per risolvere un problema di localizzazione,
ottenute analizzando le informazioni riportate dalle primitive relative alla qualit` del se-
a
gnale (Link Quality Indicator ). Sono inoltre riportate le motivazioni che hanno portato
alla selezione di dispositivi ZigBee per la realizzazione di questo lavoro di tesi.
1
ZigBee ` un marchio registrato dalla ZigBee Alliance
e
42](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-56-2048.jpg)
![Capitolo 3. Lo standard ZigBee 43
3.1 Le motivazioni della scelta
L’integrazione di tecnologie per WSN e sistemi di robotica mobile, al fine di realizzare
un’applicazione per la localizzazione, pone dei requisiti abbastanza chiari alla piatta-
forma hardware e software. L’avere a che fare con un sistema che lavora in mobilit`,
a
introduce nuove problematiche, soprattutto per quanto riguarda l’organizzazione e ge-
stione della rete. Inoltre, fattori come basso costo e autonomia in termini energetici,
sono fondamentali al fine di rendere l’applicazione facilmente realizzabile anche nella
pratica. Come ultimo, e non per questo meno importante aspetto, occorre menzionare
le possibilit` di miniaturizzazione dei dispositivi, in modo da poterli facilmente installare
a
su varie tipologie di robot mobili, anche di piccole dimensioni. Per di pi`, essi potreb-
u
bero essere indossati anche da persone o rilasciati dinamicamente nell’ambiente durante
il processo di esplorazione, in modo da garantirne la successiva localizzazione.
Dopo un’attenta analisi, la scelta ` stata indirizzata verso lo standard per LR-WPAN
e
ZigBee, dato che, come vedremo successivamente nel resto del capitolo, presenta molti
dei requisiti descritti in precedenza. La selezione ` stata effettuata dopo due settimane di
e
sperimentazione presso l’RFID-Lab2 , un laboratorio che si occupa principalmente di test
e integrazione di tecnologie wireless, in particolare Wi-Fi, Bluetooth, RFID, e appunto
ZigBee. Effettivamente questo periodo ` stato di fondamentale importanza anche per
e
considerare altre alternative (ad esempio TinyOS) e al fine di valutare anche a livello
applicativo la soluzione che si stava scegliendo.
Le piattaforma selezionata dopo questa fase di studio ` stata quella prodotta da
e
Freescale, per la precisione quella basata sul SiP MC13213 e ZigBee compliant rispetto
alla specifica ZigBee 2006. Per ulteriori dettagli sulla piattaforma impiegata si consulti
il paragrafo 4.1 e per le caratteristiche tecniche l’appendice A.
3.2 La nascita dello standard
I primi studi, che hanno portato alla successiva definizione dello standard, risalgono al
1998 ad opera di Motorola, quando alcuni gruppi di ingegneri si resero conto che effetti-
vamente molti nuovi scenari applicativi non potevano essere risolti efficacemente con le
tecnologie wireless esistenti. La versione 1.0 delle specifiche (ZigBee 2004) viene pubbli-
cata nel dicembre 2004, anche a seguito del lavoro svolto da IEEE per creare uno stan-
dard per il livello fisico e di accesso al mezzo (MAC) per le LR-WPAN, ovvero 802.15.4
[IEE06]. Contemporaneamente, nel 2002, nasceva la ZigBee Alliance, un’associazione di
oltre 200 aziende a cui partecipano alcuni dei maggiori produttori di semiconduttori a
livello mondiale, tra cui Freescale, Texas Instruments, Philips, Honeywell e Oki. Essa si
2
http://w3.uniroma1.it/rfidlab/default.asp](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-57-2048.jpg)
![Capitolo 3. Lo standard ZigBee 44
occupa di gestire l’evoluzione dello standard e di garantire l’interoperabilit` e conformi-
a
t` alle specifiche delle applicazioni sviluppate. La versione attualmente in uso ` ZigBee
a e
2006 (settembre 2006) [Zig06] e dall’ultimo trimestre del 2007 sta per essere finalizzata
la nuova versione ZigBee Pro, che comprende alcune migliorie per quanto riguarda la
scalabilit` e la sicurezza in reti di grande complessit`.
a a
3.3 Caratteristiche
Le migliori peculiarit` di ZigBee, se vogliamo, sono racchiuse proprio nel suo nome. La
a
parola ZigBee infatti, deriva dallo zigzagare delle api durante il volo; ci` rappresenta
o
proprio la semplicit` con cui ` possibile organizzare la struttura della rete e la comuni-
a e
cazione (in particolare l’instradamento), anche in caso di guasti. Quello che aggiunge
altro entusiasmo intorno alla nascita di questo protocollo ` inoltre la sua straordinaria
e
stabilit` ed affidabilit`, a fronte di consumi energetici irrisori; si pensi che con un’ali-
a a
mentazione di 3 V3 , ` possibile mantenere operativo un nodo anche per pi` di un anno.
e u
Tutte queste caratteristiche portano ZigBee ad essere molto indicato in applicazioni di
controllo e monitoraggio, in cui ad esempio ` significativo avere bassa latenza nelle comu-
e
nicazioni, sia per lo scambio di messaggi che per il collegamento alla rete. Al contrario
esso non ` stato progettato per lo scambio dati ad alti data rate; il suo massimo bitrate
e
ottenibile ` di appena 250 Kbps. In figura 3.1 sono stati messi a confronto il bitrate e il
e
range trasmissivo raggiungibili da ZigBee, rispetto ad altri protocolli wireless.
Considerando che la maggior parte dei dispositivi ZigBee compliant permette il col-
legamento di trasduttori e sensori di varie tipologie, possiamo immaginare dei possibili
scenari in cui ZigBee pu` essere impiegato convenientemente:
o
Home automation Sicurezza, controllo illuminazione, HVAC, controllo accessi.
Controllo industriale Monitoraggio dei processi, gestione energia e risorse.
Agricoltura di precisione Irrigazione controllata, dosaggio fertilizzanti.
Health care Sensori e apparecchiature medicali, controllo pazienti, telemedicina.
Elettronica di consumo Periferiche, controllo a distanza elettrodomestici, giocattoli.
Gli altri punti di forza di questa tecnologia risultano essere la bassa complessit` e
a
di conseguenza il costo di produzione. La dimensione dello stack ` molto ridotta (nel-
e
l’ordine dei 50 KB) rispetto a Bluetooth o Wi-Fi e richiede perci` hardware abbastanza
o
economico; una piattaforma hardware tipica ` formata da processore a 16 MHz con 4
e
3
Tensione corrispondente a due comuni batterie AA.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-58-2048.jpg)
![Capitolo 3. Lo standard ZigBee 45
Text Internet/Audio Compressed Video Digital Video
150 m
802.11b
Range (m)
802.11a, g
100 m 802.15.4/ZigBee
Bluetooth 2
802.15.3/UWB
10 m Bluetooth 1
100 Kbps 1 Mbps 10 Mbps 50 Mbps 100 Mbps
Data Rate
Figura 3.1: Bitrate e range trasmissivi di ZigBee rispetto ad altri standard wireless
KB di RAM e 128 KB di memoria flash, modem e porte di I/O. Spesso tali componen-
ti vengono integrati in singoli circuiti, i cosiddetti System-In-Package (SiP), riducendo
anche le dimensioni, oltre al costo e ai consumi energetici.
Molte delle caratteristiche precedentemente descritte risultano di fondamentale im-
portanza nelle WSN, in cui sono richieste le seguenti funzionalit`:
a
• Topologie di rete dinamiche
• Instradamento multi-hop
• Funzionamento con elevato numero di nodi
• Resistenza ai guasti
• Auto-organizzazione e self-healing
• Lunga autonomia energetica
Per quanto riguarda le caratteristiche trasmissive di ZigBee, esso opera nelle frequen-
ze radio assegnate per scopi industriali, scientifici e medici (ISM); 868 MHz in Europa,
915 MHz negli Stati Uniti e 2,4 GHz nella maggior parte dei paesi. Per i dettagli riguardo
il livello fisico consultare il paragrafo 3.4.1.
3.4 Lo stack ZigBee
La specifica ZigBee [Zig06] definisce uno stack protocollare che permette l’interoperabili-
t` di dispositivi wireless a basso costo, a bassi consumi energetici e con data rate limitati.
a
Esso pone le sue basi, per quanto riguarda il livello fisico (PHY) e il livello di accesso al
mezzo trasmissivo (MAC), sullo standard per le LR-WPAN IEEE 802.15.4 [IEE06]. In
questi primi due strati vengono specificati i parametri fisici di comunicazione e accesso
al canale, le primitive di trasmissione/ricezione, una gestione di base dell’autenticazione
e della sicurezza.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-59-2048.jpg)

![Capitolo 3. Lo standard ZigBee 47
Il gruppo di IEEE 802.15.4 ha previsto due differenti specifiche dello strato PHY,
operative in differenti range di frequenze; una specifica a bassa frequenza, che impiega
la banda a 868 MHz in Europa e a 915 MHz negli Stati Uniti e in Australia. La
seconda specifica ad alta frequenza utilizza invece la banda dei 2.4 GHz, disponibile nella
maggior parte dei paesi nel mondo. In tabella 3.1 ` possibile comprendere l’assegnazione
e
delle frequenze, il numero di canali disponibili e la massime velocit` di trasmissione
a
raggiungibili.
3.4.1.1 Modulazione e spreading
La funzione dello strato PHY ` principalmente quella di trasmettere e ricevere dati
e
binari, provenienti e destinati, agli strati superiori. Per le due differenti specifiche (868-
915 MHz e 2.4 GHz) vengono utilizzate tecniche di modulazione e spreading differenti,
il cui principio di funzionamento ` illustrato in figura 3.3.
e
2.4 GHz PHY
Convertitore da Convertitore da Modulazione
bit a simbolo simbolo a chip O-QPSK
DATI SEGNALE
BINARI MODULATO
Encoder Convertitore Modulazione
di erenziale da bit a chip BPSK
868-915 MHz PHY
Figura 3.3: Spreading e modulazione in 802.15.4
DSSS e modulazione O-QPSK (2.4 GHz)
In questo caso lo stream binario viene suddiviso in nibble, che vengono mappati in se-
quenze di 32 bit (dette chip) effettuando uno XOR con sequenze pseudocasuali, anch’esse
di 32 bit. Al termine di questa procedura (che prende il nome DSSS - Direct Sequence
Spread Spectrum) il segnale occupa pi` banda del necessario, permettendo di condivi-
u
dere il singolo canale diversi utenti e di resistere maggiormente a fenomeni di jamming.
Il chip che arriva al modulatore O-QPSK (Offset Quadrature Phase Shift Keying) viene
diviso in due sequenze sfasate di mezzo periodo di chip che vengono modulate separa-
tamente (sequenza in fase [I] e in quadratura [Q]); ci` limita le oscillazioni di fase a 90◦
o
(rispetto ai 180◦ della normale QPSK) fornendo un inviluppo con meno salti in ampiezza
rispetto a QPSK.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-61-2048.jpg)
![Capitolo 3. Lo standard ZigBee 48
DSSS e modulazione BPSK (868-915 MHz)
La sequenza binaria in ingresso all’encoder bit a bit, effettuando uno XOR con il risultato
dell’operazione precedente, secondo la seguente equazione:
En = Rn ⊕ En−1
dove Rn ` il bit in ingresso allo stadio di encoder differenziale, En−1 ` il risultato dell’o-
e e
perazione precedente ed En ` il risultato dell’operazione, riferito all’indice n. Successi-
e
vamente il singolo bit viene espanso con una procedura di spreading in una sequenza di
15 bit, utilizzando un chip a 15 bit (generato in modo pseudocasuale). La sequenza pro-
dotta viene poi inviata sul canale wireless utilizzando una modulazione BPSK (Binary
Phase Shift Keying) con un impulso a coseno rialzato e fattore di rolloff α = 1.
3.4.1.2 Coesistenza con interferenze
Per un dispositivo wireless, operare nelle bande ISM, pu` diventare problematico data
o
la numerosa presenza di altri apparecchi che utilizzano quelle frequenze. Per ZigBee le
potenziali interferenze si presentano a 2.4 GHz, frequenza a cui lavorano anche 802.11
b/g e Bluetooth. In questo interessante articolo [Cro07] ` riportato un esperimento in cui
e
viene misurato il PER (Packet Error Rate) su una rete ZigBee funzionante in presenza
di una Wi-Fi 802.11b attiva; dai risultati si apprende che ZigBee ` abbastanza tollerante
e
alle interferenze, avendo uno spettro di ampiezza nettamente inferiore a Wi-Fi. Ad
ogni modo, durante le fasi di installazione di diverse tecnologie wireless operanti sulla
medesima banda, ` bene scegliere canali che siano ortogonali tra loro, come ` possibile
e e
osservare in figura 3.4.
2.40 2.41 2.42 2.43 2.44 2.45 2.46 2.47 2.48
Figura 3.4: Coesistenza di ZigBee con 802.11](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-62-2048.jpg)



![Capitolo 3. Lo standard ZigBee 53
Come accadeva nello strato PHY, la comunicazione avviene mediante i SAP riservati
ai dati e al controllo (fig. 3.8, il MCPS-SAP (MAC Common Part Sublayer-SAP) e il
MLME-SAP (MAC Layer Management Entity-SAP) rispettivamente. Anche in questo
caso lo strato conserva un PIB in cui saranno contenuti ad esempio il periodo di beacon,
l’extended address e i parametri della funzione di backoff.
MCPS-SAP MLME-SAP
MLME
MAC Common
Part Sublayer MAC
PIB
PD-SAP PLME-SAP
Figura 3.8: I SAP dello strato MAC
3.4.3 Lo strato NWK
Come accennato precedentemente e come si pu` osservare in figura 3.2, le fondamenta
o
su cui ZigBee fa affidamento sono lo strato PHY e MAC definiti da IEEE 802.15.4. Alle
funzionalit` di questi, esso aggiunge la definizione dello strato di rete (NWK) e dello
a
strato applicazione (APL). In particolare il primo dei due, del quale ci occuperemo in
questo paragrafo, permette di creare delle topologie di rete complesse che vanno oltre
quelle disponibili fino allo strato MAC4 . Tale strato si occupa principalmente di: gestire
la connessione alla rete di nuovi dispositivi, instradare pacchetti verso destinazioni non
direttamente raggiungibili, identificare le route verso nuove destinazioni, assegnare di
indirizzi (short address e PAN address) coerenti e infine applicare la sicurezza sui nodi
che ne fanno richiesta.
3.4.3.1 Tipi di dispositivi ZigBee
Nelle reti ZigBee, i dispositivi ricalcano fedelmente quelli precedentemente descritti nella
sezione 3.4.2.1. Anche in questo caso essi si distinguono dalle funzionalit` offerte e, di
a
conseguenza, dalla complessit`. I possibili dispositivi ZigBee rientrano in una delle
a
seguenti categorie, con le responsabilit` e funzionalit` elencate:
a a
• ZigBee Coordinator (ZC)
– Startup della rete e decisione del relativo PAN-ID
4
Anche se non specificato esplicitamente, al livello MAC sono disponibili solo due topologie di rete:
quella a stella e quella peer-to-peer [IEE06]](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-67-2048.jpg)

![Capitolo 3. Lo standard ZigBee 55
Mesh Questa interessante topologia consente a dispositivi che si trovano nel medesimo
range di trasmissivo di comunicare direttamente, a differenza di quello che accade
nelle reti cluster-tree. In questo modo se il destinatario ` direttamente connesso, il
e
messaggio impiegher` un hop, altrimenti esso verr` instradato seguendo il percorso
a a
deciso dall’algoritmo di routing (fig. 3.9(c)).
Occorre specificare che, sebbene lo ZC sia richiesto per avviare la rete, esso non
` necessario per il suo successivo funzionamento (tranne che per la topologia a stella
e
ovviamente). Questa ` una caratteristica che ritroviamo anche nei ZR e che rappresenta
e
una delle peculiarit` di ZigBee, ovvero la capacit` di resistere ai guasti organizzandosi
a a
autonomamente.
(a) Topologia a stella (b) Topologia cluster-tree
ZigBee Coordinator
(802.15.4 PAN
Coordinator)
ZigBee Router
(802.15.4 FFD)
ZigBee End Device
(802.15.4 RFD o FFD)
(c) Topologia mesh
Figura 3.9: Topologie di rete ZigBee
3.4.3.3 Algoritmi di routing
ZigBee essendo un protocollo per WSN, richiede algoritmi di routing che non generino
traffico eccessivo per aggiornare le strutture dati dello strato di rete, come pu` accadere
o
ad esempio in soluzioni basate su Distance Vector e Link State [PD03]. Risulta necessario
pertanto riferirsi a classi di algoritmi di routing dedicati alle MANet (Mobile Ad Hoc
Network).
Nello strato NWK ZigBee vengono impiegati sostanzialmente algoritmi gerarchici con
qualche ottimizzazione sulle tabelle di instradamento quando possibile. In particolare
vengono utilizzati:](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-69-2048.jpg)
![Capitolo 3. Lo standard ZigBee 56
1. Ad Hoc On Demand Distance Vector (AODV)
2. Motorola Cluster-Tree algorithm
descritti ampiamente in [Lan03, Per03, Erg04].
3.4.3.4 Sicurezza
Come ` possibile osservare in figura 3.2, ZigBee offre anche meccanismi di sicurezza,
e
gestiti dal livello SSP. Tali meccanismi sono basati su un algoritmo AES a 128 bit,
aggiungendo alle funzionalit` di base offerte dal MAC, servizi per la scelta delle chiavi
a
e il loro trasporto, la gestione dei dispositivi e la protezione dei frame. La gestione `
e
affidata ad un trust center che si occupa principalmente di:
• Autenticare i dispositivi possono accedere alla rete
• Aggiornare periodicamente le chiavi di rete
• Abilitare la sicurezza end-to-end tra dispositivi
Di solito queste responsabilit` sono affidate al coordinatore o comunque ad un dispo-
a
sitivo con maggiori risorse di calcolo. Ovviamente, in ambienti in cui la sicurezza non
` fondamentale (come ad esempio nel monitoraggio nell’agricoltura di precisione), tali
e
servizi vengono disattivati per aumentare l’autonomia energetica e le prestazioni della
rete. Per maggiori dettagli sui meccanismi di sicurezza si consulti [Zig06].
3.4.3.5 Primitive offerte dallo strato NWK
Lo strato NWK ha la responsabilit` di fornire le seguenti funzionalit` ai livelli superiori:
a a
- Applicare gli algoritmi di routing idonei alla topologia di rete utilizzata
- Capacit` di garantire l’autenticit` e la confidenzialit` delle trasmissioni
a a a
- Creazione di una nuova rete (ZC)
- Gestire la connessione e disconnessione (join/leave) a reti esistenti (ZR,ZED)
- Assegnazione di indirizzi ai nuovi dispositivi
- Conoscenza dei dispositivi nel proprio raggio trasmissivo (neighborhood )
- Possibilit` di scoprire nuove route (route discovery)
a
La comunicazione del NWK con gli strati superiori avviene mediante due SAP, il NLME-
SAP (Network Layer Management Entity-SAP) e il NLDE-SAP (Network Layer Data
Entity-SAP) (fig. 3.10). Mediante il primo vengono gestite tutte le primitive di ricerca](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-70-2048.jpg)
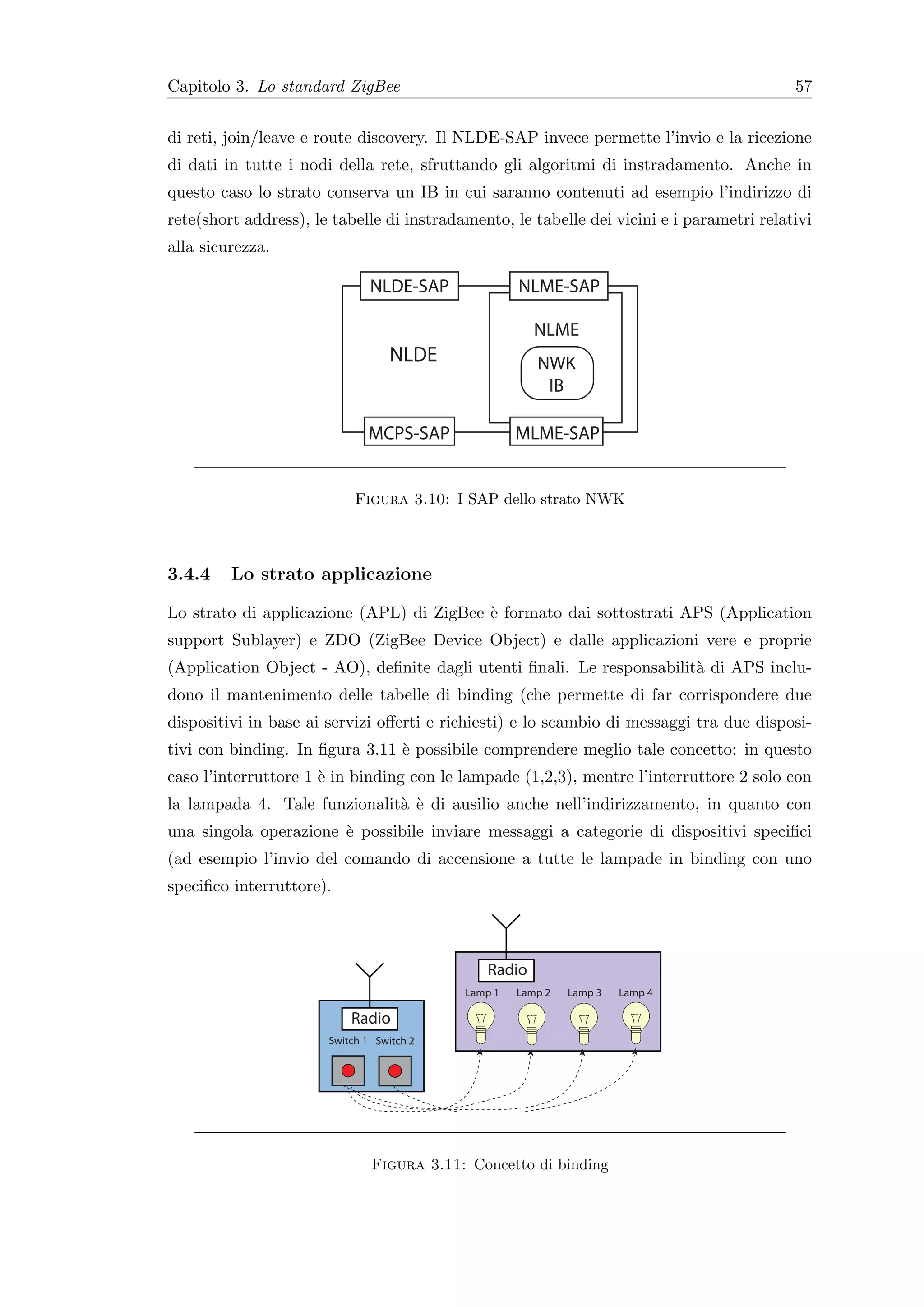


![Capitolo 4. Analisi della qualit` del segnale in ambienti indoor/outdoor
a 61
4.1 La piattaforma hardware/software di riferimento
4.1.1 Hardware
La piattaforma utilizzata durante tutto il periodo di tesi ` quella di Freescale, uno dei
e
maggiori produttori di semiconduttori a livello mondiale e membro di ZigBee Alliance.
`
E stato possibile acquistare dei kit di valutazione, avendo a disposizione un buon numero
di nodi e tutto l’occorrente per effettuare i test necessari.
Ogni nodo contiene un transceiver basato sul SiP MC13213 [Sem07b, Sem07a], com-
pliant con lo standard IEEE 802.15.4 e con la specifica ZigBee 2006, funzionante alle
frequenze ISM a 2.4 GHz, con un potenza di trasmissione regolabile tra 3 dBm e -15
dBm e una sensibilit` in ricezione di -95 dBm. All’interno dell’MC13213 ` presente un
a e
microcontrollore (Microcontroller Unit - MCU) della famiglia HCS08 a 40 MHz, con 60
KB di memoria flash e 4 KB di memoria RAM, che permette di avere contemporanea-
mente sullo stesso SiP sia lo stack per le comunicazioni che quello per le applicazioni.
In figura 4.1 ` possibile osservare un dettaglio della Sensor Reference Board (SRB), la
e
scheda su cui sono installati il SiP MC13123, la memoria flash, il circuito di ricezione,
le interfacce I/O e i sensori. Questa scheda, insieme alla NCB (Network Coordinator
Board)1 , viene fornita nei kit di valutazione e permette di testare in modo immediato le
potenzialit` di ZigBee. Spesso l’utente finale pu` essere interessato solo alle funzionalit`
a o a
di comunicazione di queste schede e pu` decidere, in base alle proprie esigenze2 , come
o
progettare un nuovo tipo di scheda basata sul chip MC13213. A livello di interfacce
General purpose Interfaccia BDM
I/O
Sensore temperatura
Accelerometro XYZ
Interfaccia USB
MC13213 Transceiver
Buzzer
Alimentazione Memoria ash
esterna LED
Interruttore
ON/OFF
Tasti funzione
Figura 4.1: La Sensor Reference Board (SRB) basata sul SiP MC13213 di Freescale
1`
E una scheda con le stesse funzionalit` della SRB, ma fornisce in aggiunta un display LCD a due
a
linee e l’interfaccia RS232
2
Ad esempio necessita di un diverso circuito di ricezione per aumentare la portata trasmissiva e non
ha bisogno dei sensori, per ridurre consumi e dimensioni](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-75-2048.jpg)
![Capitolo 4. Analisi della qualit` del segnale in ambienti indoor/outdoor
a 62
di comunicazione, esso supporta due porte seriali (Serial Communications Interface -
SCI), sia RS232 (presente solo sulla NCB) che USB, per il collegamento ad unit` di
a
`
elaborazione mediante UART. E possibile inoltre far comunicare il nodo con dispositivi
esterni (ad esempio particolari sensori) mediante le porte GPIO (General Purpose I/O),
costruendo appositi circuiti di interfaccia.
Sulla SRB sono presenti inoltre un sensore di temperatura (LM61B della National
Semiconductors), un accelerometro a tre assi (MMA7260Q di Freescale) e un buzzer
audio. Essa richiede una tensione di alimentazione di 3.3 V, che pu` essere fornita me-
o
diante due batterie AA, l’interfaccia USB o l’alimentatore esterno. Per quanto riguarda i
consumi, la MCU ha delle modalit` di power-saving, anche se essi dipendono fortemente
a
dal numero di sensori utilizzati e soprattutto dalla frequenza delle trasmissioni dati; con
le sole batterie comunque, il dispositivo pu` avere un’autonomia di oltre un anno.
o
4.1.1.1 Antenna
La progettazione di una antenna ` un fattore critico per ottenere un buon range trasmis-
e
sivo e un throughput stabile in una applicazione wireless. Questo ` vero specialmente
e
in dispositivi a bassa potenza e di dimensioni ridotte come quelli considerati, dove lo
spazio riservato all’antenna ` inferiore a quello ideale.
e
La struttura dell’antenna dovrebbe avere dimensioni ragionevoli rispetto alla lunghez-
za d’onda del campo elettromagnetico. Una dimensione naturale ` ad esempio met` della
e a
lunghezza d’onda; a 2.4 GHz equivale a circa 6 cm e permette di lavorare alla frequenza
di risonanza. Scendere sotto questa frequenza pu` causare una bassa efficienza.
o
Nel nostro caso, lo spazio sulla scheda permette di avere una antenna di un quarto
della lunghezza d’onda con struttura a monopolo, in cui una met` ` formata dal filo
a e
vero e proprio e l’altra dal piano di massa3 . In particolare, sia la SRB che la NCB,
montano una F-Antenna [Sem06] che ` possibile osservare in figura 4.2. Questo tipo
e
di antenna ` utilizzata ampiamente, data la sua compattezza, un pattern di radiazione
e
quasi omnidirezionale e una buona efficienza. Ovviamente le sue ridotte dimensioni
portano a performance minori (in termini di guadagno e range trasmissivi) e non sempre
questo ` accettabile; tuttavia, nei test affrontati, le prestazioni sono risultate adeguate.
e
In particolare, nei primi esperimenti di trasmissione, abbiamo rilevato un range tra-
smissivo massimo di circa 100 m, in condizioni di LOS e con potenza in trasmissione di 0
dBm, ottenendo un Packet Error Rate (PER) del 5% su 1000 pacchetti da 20 byte invia-
ti. Per quanto riguarda il pattern di radiazione, esso appare abbastanza uniforme come
` mostrato in figura 4.2(c); come vedremo ci` risulter` efficace in situazioni di mobilit`
e o a a
dei dispositivi. Al paragrafo 4.1.2 sono riportati alcuni test riguardo l’orientamento delle
antenne.
3
Costituito ad esempio da rimanenze tra i collegamenti sul circuito stampato, come collegamenti di
massa e alimentazione.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-76-2048.jpg)
![Capitolo 4. Analisi della qualit` del segnale in ambienti indoor/outdoor
a 63
Conduttore
Circuito stampato
Piano di massa
(a) Struttura di una F-Antenna (b) Particolare dell’F-Antenna montata sulla
SRB
5
0
-5
-10
-15
-20
Polarizzazione verticale (dBi)
-25 Polarizzazione orizzontale (dBi)
-30
(c) Diagramma di radiazione [Sem06]
Figura 4.2: Struttura ad F-Antenna
4.1.2 Test di orientamento dell’antenna
Per verificare empiricamente il pattern di radiazione dell’antenna, trasmettitore e ri-
cevitore sono stati posti alla distanza di due metri, ad un’altezza di 50 cm dal suolo e
variando l’orientamento del ricevitore ad ogni ripetizione, come ` possibile osservare nella
e
figura 4.3. I valori riportati sono ottenuti mediando il valore del Link Quality Indicator
(par. 4.1.4) su 100 pacchetti ricevuti. Dai risultati ottenuti, le antenne dei dispositi-
vi sembrano avere un pattern abbastanza uniforme in tutte le direzioni, soprattutto se
mantenuti in posizione orizzontale.
4.1.3 Software
Il kit di sviluppo impiegato include tre tipi di stack protocollari, con cui ` possibile
e
sviluppare applicazioni a differente livello di complessit`:
a
`
Simple MAC (SMAC) E uno stack proprietario di Freescale e pu` essere utilizzato
o
per implementare semplici reti di tipo punto-punto e a stella. Data la sua sem-
plicit` ` stato impiegato nelle fasi preliminari, per testare alcune caratteristiche
a e
trasmissive dei dispositivi.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-77-2048.jpg)
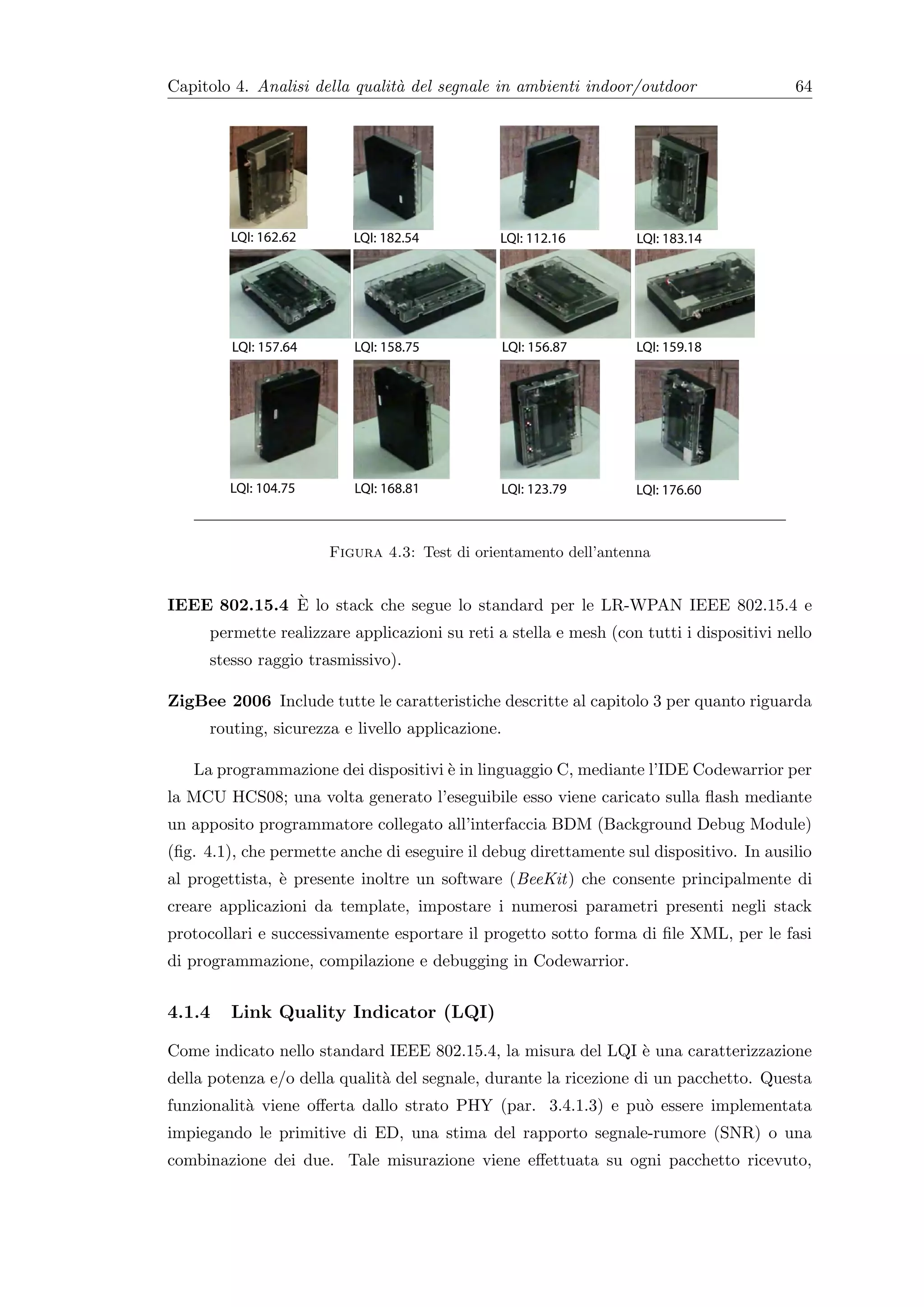



![Capitolo 4. Analisi della qualit` del segnale in ambienti indoor/outdoor
a 68
4.3 Rilevazioni indoor
Nella seconda parte di test, realizzati in ambienti indoor, l’interesse ` stato rivolto a
e
capire come sfruttare le informazioni relative alla qualit` del segnale. In questo ca-
a
so, trasformare la potenza del segnale ricevuto in una distanza, al fine di realizzare
un qualche metodo di localizzazione range-based, ` sembrato quasi immediatamente
e
un procedimento poco realistico e comunque gi` affrontato ampiamente in letteratura
a
[SKOM06, BP00, BGGT07], con risultati poco brillanti.
Anche i modelli di propagazione indoor, descritti al paragrafo 2.2, non risultano
particolarmente utili in quanto troppo dipendenti dallo specifico ambiente in cui, empi-
ricamente, vengono ricavati i diversi parametri, richiedendo una fase di tuning eccessi-
vamente complessa. Inoltre, anche dopo aver prodotto un modello abbastanza preciso,
ogni minima perturbazione nell’ambiente, come passaggio di persone, apertura o chiu-
sura di porte, pu` seriamente compromettere le misurazioni della qualit` del segnale, e
o a
di conseguenza il processo di localizzazione.
4.3.1 Test statici
In prima istanza, la sperimentazione ha previsto uno scenario statico, in cui un nodo
trasmettitore viene mantenuto fisso e un altro ricevitore viene spostato in posizioni ben
determinate, al fine di stilare una specie di mappa del segnale dell’ambiente. Anche
in questo caso, si trovano alla medesima altezza (50 cm), senza considerare importan-
te l’orientamento delle antenne. Le rilevazioni sono state effettuate principalmente in
una abitazione e al Dipartimento di Informatica e Sistemistica (DIS), ed ` possibile
e
consultare integralmente i dati rilevati al paragrafo 4.3.4. Come esempio di riferimento
consideriamo la figura 4.7, in cui ` presente la pianta dell’abitazione, i punti in cui sono
e
state fatte le rilevazioni, il valore LQI medio in quella posizione e l’icona del dispositivo
rappresenta il trasmettitore. Quello che risulta immediatamente ` l’impossibilit` di rica-
e a
vare direttamente informazioni sulla distanza, a partire dal LQI: ad esempio la posizione
a ` pi` vicina a b ma presenta LQI minore. Ci` ` dovuto ovviamente all’attenuazione
e u oe
provocata dalla struttura e dagli altri fenomeni fisici della propagazione del segnale.
Sebbene non sia possibile trasformare direttamente il LQI in una distanza, se con-
sideriamo globalmente tutti i valori, essi forniscono una buona indicazione di quanto i
nodi siano vicini: i valori della stanza in cui ` presente il trasmettitore sono nettamente
e
maggiori rispetto ai valori delle altre stanze.
4.3.2 Test dinamici
L’ultima fase di test, rispetto alle altre, ha previsto la sperimentazione di trasmissioni in
condizioni di mobilit`. A questo scopo ` stato previsto l’utilizzo dei robot mobili su ruote
a e](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-82-2048.jpg)

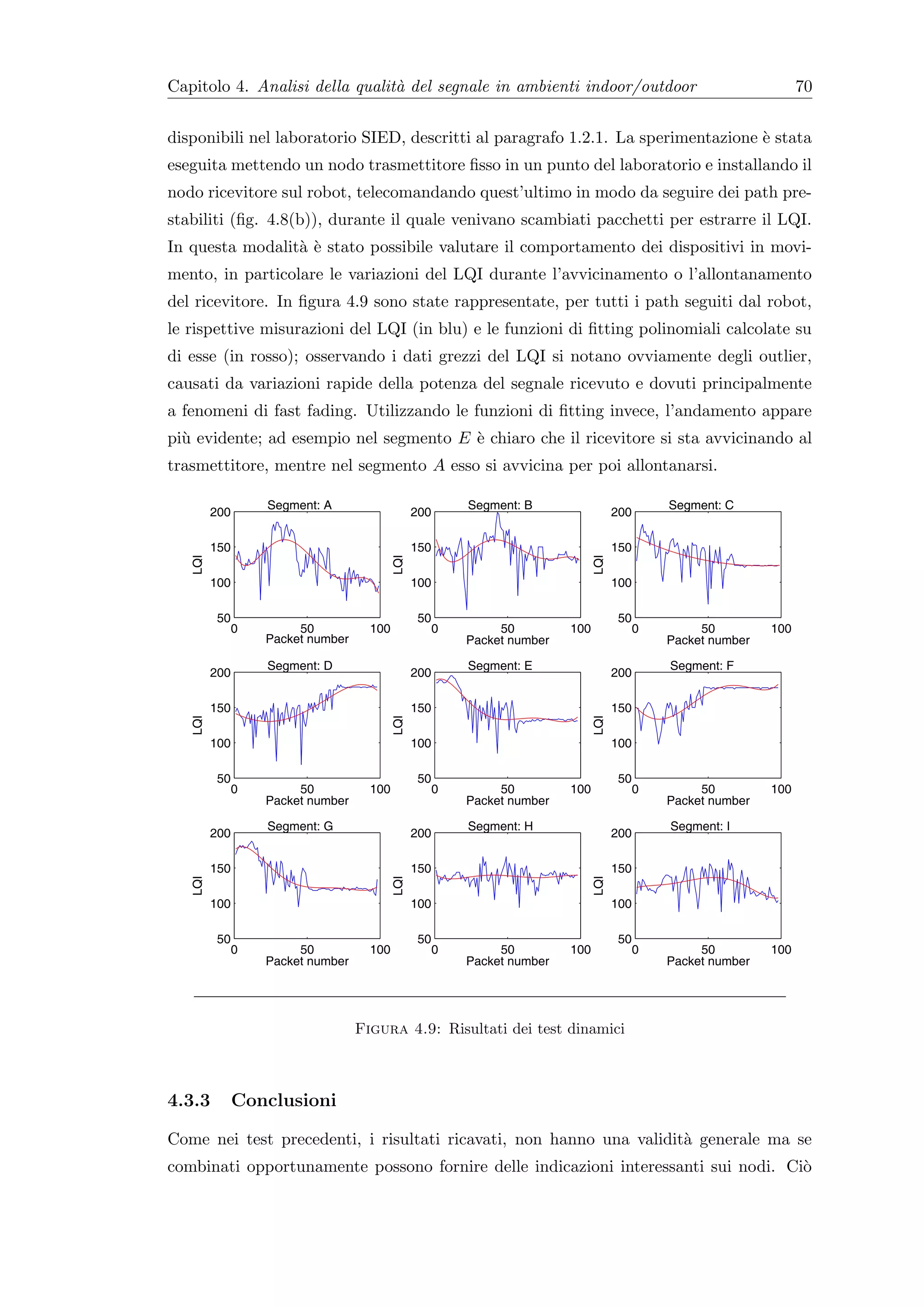
![Capitolo 4. Analisi della qualit` del segnale in ambienti indoor/outdoor
a 71
che appare evidente, almeno indoor, ` la difficolt` di realizzare un sistema di localiz-
e a
zazione range-based che sfrutti esclusivamente le informazioni estratte dalla qualit` del
a
segnale ricevuto. Come abbiamo visto anche al paragrafo 2.4.3, sono molteplici i fatto-
ri che possono influenzare le misurazioni, provocando una stima della posizione molto
imprecisa.
Inoltre, durante la mia permanenza all’RFID-Lab, mi ` stato possibile assistere ad
e
alcune sperimentazioni da loro effettuate sul Location Engine della Texas Instrumen-
ts [Aam06], presente sui dispositivi con SoC (System-on-chip) CC2431: i risultati in-
door, sebbene considerando un alto numero di nodi beacon, non sono stati incoraggianti,
presentando alti errori di localizzazione.
Per questi ed altri motivi, come si vedr` al capitolo 5, l’informazione estratta dal LQI
a
non verr` utilizzata per realizzare un vero e proprio sistema di localizzazione, ma sar`
a a
sfruttata ampiamente per guidare l’esplorazione da parte di robot mobili in ambienti
semistrutturati.
4.3.4 Dati numerici rilevati
Le rilevazioni indoor sono state effettuate in due ambienti differenti: un’abitazione e il
1◦ piano del Dipartimento di Informatica e Sistemistica. La configurazione dei test `
e
descritta al paragrafo 4.3.
Abitazione
In figura 4.7 ` illustrata la pianta dell’abitazione dove sono state fatte le rilevazioni.
e
Per interpretare correttamente i dati riportati in tabella 4.2, occorre considerare esclu-
sivamente le lettere, relative alle diverse locazioni dove il ricevitore ` stato posizionato,
e
mentre l’icona del dispositivo rappresenta la posizione del trasmettitore (mantenuto fis-
so). Ogni valore LQI ` ottenuto effettuando una media su 100 pacchetti ricevuti nella
e
singola posizione, mantenendo i due dispositivi ad un’altezza dal suolo di 50 cm.
LQI in posizione
Data
a b c d e f g h i l m n o p q r s t u
17/12/07 77.39 66.62 46.62 69.83 115.83 91.8 54.31 65.77 69.94 26.52 83.62 30.83 72.04 77.14 66 82.65 108.44 125.44 107.59
20/12/07 69.04 100.16 47.66 59.12 95.39 70.97 92.12 48.41 72.25 40.08 70.62 16.22 68.83 81.93 82.16 51.22 145.27 157.58 156.41
22/12/07 63.78 98.75 44.12 65.50 112.98 85.72 88.96 49.66 70.07 33.62 76.79 30.25 69.46 78.19 84.25 69.03 148.93 148.38 155.67
Tabella 4.2: Misurazioni LQI in una abitazione
Dipartimento di Informatica e Sistemistica (1◦ Piano)
Anche in questo caso, le rilevazioni sono state effettuate nella stessa modalit` dell’a-
a
bitazione, ma ` stato possibile eseguirle una singola volta. Per semplicit` i valori sono
e a
riportati direttamente sulla pianta di figura 4.10, dove l’icona del dispositivo rappresenta](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-85-2048.jpg)

![Capitolo 5
Esplorazione guidata dalla qualit`
a
del segnale
In questo capitolo viene descritta l’idea predominante di questo lavoro di tesi: le in-
formazioni sulla qualit` del segnale provenienti dai nodi ZigBee vengono utilizzate per
a
aiutare l’esplorazione di ambienti sconosciuti per mezzo di robot mobili. Dopo la fase
di studio dei metodi di localizzazione wireless-based (cap. 2) e l’analisi sulla qualit` del
a
segnale (cap. 4), l’obiettivo del lavoro ` evoluto, perdendo le sembianze di un vero e
e
proprio sistema di localizzazione di supporto per robot.
Dai risultati conseguiti nelle sperimentazioni, si evincono le complessit` a cui si va
a
incontro nel realizzare un sistema di localizzazione basato sulla potenza del segnale
ricevuto1 . Le problematiche maggiori si incontrano soprattutto indoor, dato che tale
grandezza fisica non pu` essere facilmente relazionata alla distanza e ci` ostacola non
o o
poco l’applicazione di metodologie range-based. A dir la verit`, sistemi basati sul RSS
a
fingerprinting come Radar [BP00] o MoteTrack [LW04], hanno dimostrato una discreta
precisione, a discapito di tempi di setup onerosi e dipendenza diretta dall’ambiente
in cui vengono impiegati. Gli approcci range-free appaiono senz’altro validi, ma con
considerevoli limitazioni, dovute soprattutto alle topologie di rete e alla densit` di nodi
a
richieste, non applicabili nei nostri scenari di interesse.
Inizialmente, questo lavoro di tesi, era partito con l’intento di elaborare e sperimen-
tare, un sistema di localizzazione che traesse giovamento dall’impiego di tecnologie per
WSN, risultando di notevole interesse nel campo della robotica mobile, ad esempio per
aiutare nella soluzione di problemi di localizzazione globale o, pi` in generale, di SLAM.
u
A seguito delle sperimentazioni effettuate, l’interesse si ` spostato dalla localizzazione del
e
nodo ZigBee, alle strategie efficaci per raggiungerlo; questo, ovviamente, non perch´ il
e
primo problema sia meno interessante, ma perch´ potremmo considerare il secondo una
e
1
Come abbiamo visto al paragrafo 4.1.4, nel caso dei dispositivi impiegati, possiamo parlare
indifferentemente di RSS o LQI, grazie alla relazione 4.1
73](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-87-2048.jpg)
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 74
sua versione “rilassata”. Nell’esplorazione di ambienti effettuata da robot mobili, questa
funzionalit` potrebbe essere pensata come un sensore aggiunto, che riesce ad indicare la
a
vicinanza di un punto sulla mappa, sia esso stabilito volontariamente o meno.
Quello a cui siamo davanti pu` essere pensato come un nuovo approccio all’esplora-
o
zione, che rispetto ad altri [SB03, BMF+ 00, MLLH06, TK03], prende le sue decisioni in
base alla qualit` del segnale ricevuto dal dispositivo ZigBee installato sul robot mobile;
a
in questo caso, il problema della ricerca di un punto nell’ambiente, viene risolto mediante
un’esplorazione guidata e la scelta delle frontiere avviene con un contributo informati-
vo pi` rilevante rispetto ai casi in cui tali scelte vengono effettuate con una strategia
u
greedy (ad esempio, considerando la frontiera pi` vicina [Yam98]). Con tali considera-
u
zioni, la ricerca cieca, risolta mediante esplorazione, diviene quindi ricerca informata e
consente di ridurre notevolmente i tempi per il raggiungimento dell’obiettivo della mis-
sione. L’idea ` quella di riprodurre la situazione vista al paragrafo 4.3, mantenendo un
e
nodo fisso che rappresenta l’obiettivo, in grado di trasmettere un pacchetto beacon, e
pi` nodi installati altrettanti su robot mobili, in grado di ricevere questi avvisi e sce-
u
gliere deterministicamente, basandosi sul LQI ricevuto, quale nuova zona dell’ambiente
esplorare.
Come vedremo successivamente, l’esplorazione ` basata anche in questo caso sul
e
concetto di frontiere [Yam97], la cui selezione ad ogni step ` affidata ad un algoritmo
e
euristico. Ovviamente, considerando che le scelte pi` rilevanti fatte dall’algoritmo ven-
u
gono effettuate elaborando un dato poco stabile e rumoroso come il LQI, esso non sar`
a
infallibile in ogni condizione e necessiter` di strumenti di filtraggio adeguati per ridurre
a
le incertezze sulle misurazioni.
Questo tipo di metodologia di esplorazione, si presta abbastanza bene ad ambienti
indoor strutturati e semistrutturati, con possibili scenari di applicazione sono che de-
scritti nel seguito. L’algoritmo implementato ` stato sperimentato prima in un ambiente
e
di simulazione e, successivamente, su un robot mobile reale. I risultati conseguiti sono
descritti al capitolo 7.
In questo capitolo verr` illustrato in dettaglio il funzionamento generale dell’algorit-
a
mo, mentre al capitolo 6 ` lasciata la descrizione delle scelte progettuali e implementative.
e
La sua presentazione ` stata realizzata con lo scopo principale di dimostrare la validit`
e a
dell’approccio; molte considerazioni possono essere fatte, al fine di migliorarlo e renderlo
pi` efficiente.
u
5.1 Concetti preliminari
Nel seguito vengono introdotti alcuni concetti, necessari per comprenderne al meglio la
struttura dell’intero sistema realizzato.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-88-2048.jpg)
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 75
5.1.1 Sistema di riferimento
Considerando che in questa tesi sono stati prese in considerazione esplorazioni di spazi
bidimensionali, per specificare la posizione del robot ` stata utilizzata la convenzione
e
che prevede un riferimento globale per il piano (XI , YI ) e uno locale al robot (XR , YR ),
come riportato in figura 5.1. Una volta scelto il punto P , la generica posizione (posa)
sulla mappa sar` individuata dalla terna (x, y, θ).
a
YI
YR
XR
θ
P
XI
Figura 5.1: Sistema di riferimento per il robot
5.1.2 Esplorazione mediante frontiere
Per un robot mobile che non ha conoscenza a priori dell’ambiente e deve quindi esplorarlo,
un approccio abbastanza noto in letteratura ` quello descritto in [Yam97], basato sul
e
concetto di frontiera. Essa rappresenta la regione di che delimita lo spazio esplorato e
quello non esplorato; in figura 5.2 ` rappresentato, in bianco lo spazio esplorato, in nero
e
gli ostacoli, in blu lo spazio inesplorato e i punti viola rappresentano il punto selezionato
come rappresentante della frontiera, dato che essa ` composta da tutti i punti bianchi
e
che confinano con il blu. A volte, a partire dai punti di frontiera, per calcolare il punto
Figura 5.2: Esplorazione basata su frontiere
che la rappresenta unicamente, viene utilizzato semplicemente il baricentro di tutti i suoi](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-89-2048.jpg)
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 76
punti. Nel paragrafo 6.2.1 ` possibile consultare dettagli sull’implementazione software
e
concernente la ricerca di frontiere.
In questo la rappresentazione spaziale dell’ambiente viene fatta su occupancy grid,
in cui, ad ogni rilevazione dei sensori del robot (sonar, laser, infrarossi) viene modificata
la probabilit` che in una determinata cella della mappa sia presente un ostacolo o meno.
a
Per la ricerca delle frontiere nella mappa di solito vengono utilizzati strumenti della
computer vision, raggruppando tutte le celle facenti parti dello spazio esplorato (bianco)
e suddividendole in differenti regioni di frontiera, utilizzando tecniche di blob coloring
[BB82]. Ogni regione con un numero di punti maggiore di una determinata soglia `
e
considerata un frontiera.
Questo tipo di approccio, basato sulle frontiere, si presta bene ad ambienti indoor
e outdoor, in cui gli ostacoli possono trovarsi in posizioni arbitrarie, permettendo di
estendere gradualmente gli spazi di esplorazione.
5.1.3 Configurazione dell’agente
Nel seguito si assumer` di lavorare con un agente configurato per l’esplorazione auto-
a
noma, ovvero con componenti software e sensori in grado di permettere lo spostamento
del robot mobile da un punto libero della mappa ad un altro, in maniera indipendente
e senza intervento dell’operatore. Negli esperimenti effettuati, sia in simulazione che
nella realt`, sono presenti dei moduli dedicati al mapping, alla localizzazione, al motion
a
control e alla navigazione, appartenenti alla piattaforma di sviluppo SPQR-RDK, intro-
dotta al paragrafo 1.6. Dal punto di vista dei sensori, oltre all’odometria, ` presente un
e
laser scanner che permette di effettuare agevolmente esplorazione basata su frontiere.
5.2 Esplorazione guidata dal LQI - Descrizione dell’algo-
ritmo
In questa parte della tesi, viene descritto in dettaglio il funzionamento dell’algoritmo
di esplorazione per robot mobili, basato sulla qualit` del segnale ricevuto da disposi-
a
tivi ZigBee. Per il momento la trattazione viene affrontata dal punto di vista teorico,
tralasciando alcuni aspetti implementativi che verranno illustrati al capitolo 6.
Iniziamo col dire che l’assunzione principale che viene fatta dall’algoritmo, ` quella
e
di avere a disposizione dei nodi beacon presenti nell’ambiente da esplorare, in grado di
inviare dei messaggi a dei nodi subscribers che ne fanno richiesta. Nella fase preliminare,
il robot deve scegliere il beacon verso cui avvicinarsi. Considerando che in un dato istante
pi` dispositivi ZigBee possono trovarsi nel raggio di copertura, esso ne seleziona uno
u
come quello obiettivo da raggiungere, basandosi su un determinato criterio (ad esempio
sceglie il nodo con LQI medio maggiore).](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-90-2048.jpg)

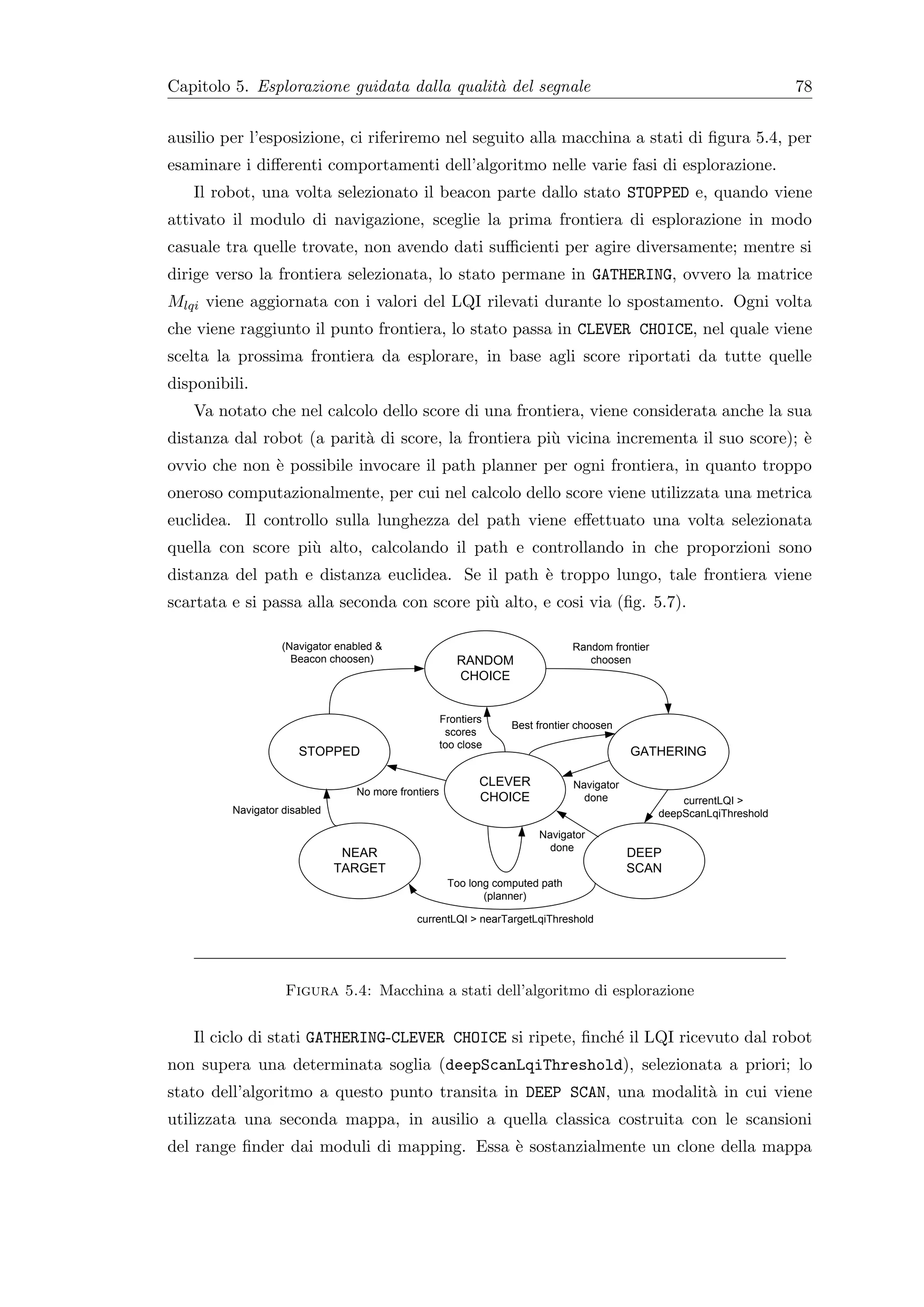
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 79
originale, in cui viene simulata una scansione con raggio di apertura molto minore2 , che
consente di muoversi a step pi` brevi (fig. 5.5). Questa operazione ` necessaria, dato che
u e
una volta che il laser scanner nella sua scansione non trova pi` frontiere, l’esplorazione
u
continua sulle altre, non considerando il fatto che il nodo beacon da raggiungere potrebbe
trovarsi proprio nell’area della scansione appena effettuata. Ovviamente, per semplificare
il riconoscimento di quest’ultimo quando si ` nelle vicinanze, possono essere utilizzate
e
tecniche ausiliarie, come la visione artificiale [BB82].
Figura 5.5: La mappa in modalit` DEEP SCAN
a
Dallo stato DEEP SCAN, si esce quando il LQI supera una seconda soglia, che rap-
presenta una situazione in cui trasmettitore e ricevitore sono ad una distanza di circa 2
metri. In questo caso lo stato diventa NEAR TARGET e il robot si ferma immediatamente
nella posizione in cui si trova, indicando che nodo beacon ` nelle immediate vicinanze.
e
5.2.1 Calcolo degli score delle frontiere
Il punteggio (score) di una frontiera, rappresenta l’indicatore di preferenza principale,
mediante il quale, ad ogni passo dell’esplorazione, viene stabilito l’ordinamento delle
frontiere. L’attribuzione dello score, come vedremo, si basa principalmente sulla matrice
Mlqi e sulla divisione della mappa in celle. Le coordinate di un punto (x, y) sul piano
della mappa (XI , YI ) (par. 5.1.1), quando necessario, vengono convertite nella relativa
cella e quindi in indici sulla matrice Mlqi , come ad esempio accade per la posa del robot
e i punti rappresentanti delle frontiere.
L’esempio esplicativo al quale ci riferiremo per la spiegazione ` illustrato in figura
e
5.8, in una condizione in cui ` necessario scegliere tra due possibili frontiere. La griglia
e
rappresenta Mlqi , con i valori di LQI rilevati nelle differenti celle. Come vediamo, anche
il robot e le frontiere sono posizionate su celle.
2
Ad esempio, nei nostri esperimenti, il laser scanner Hokuyo ha un raggio di 4 metri, mentre la
scansione ridotta viene effettuata con raggio pari a 1 metro](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-93-2048.jpg)
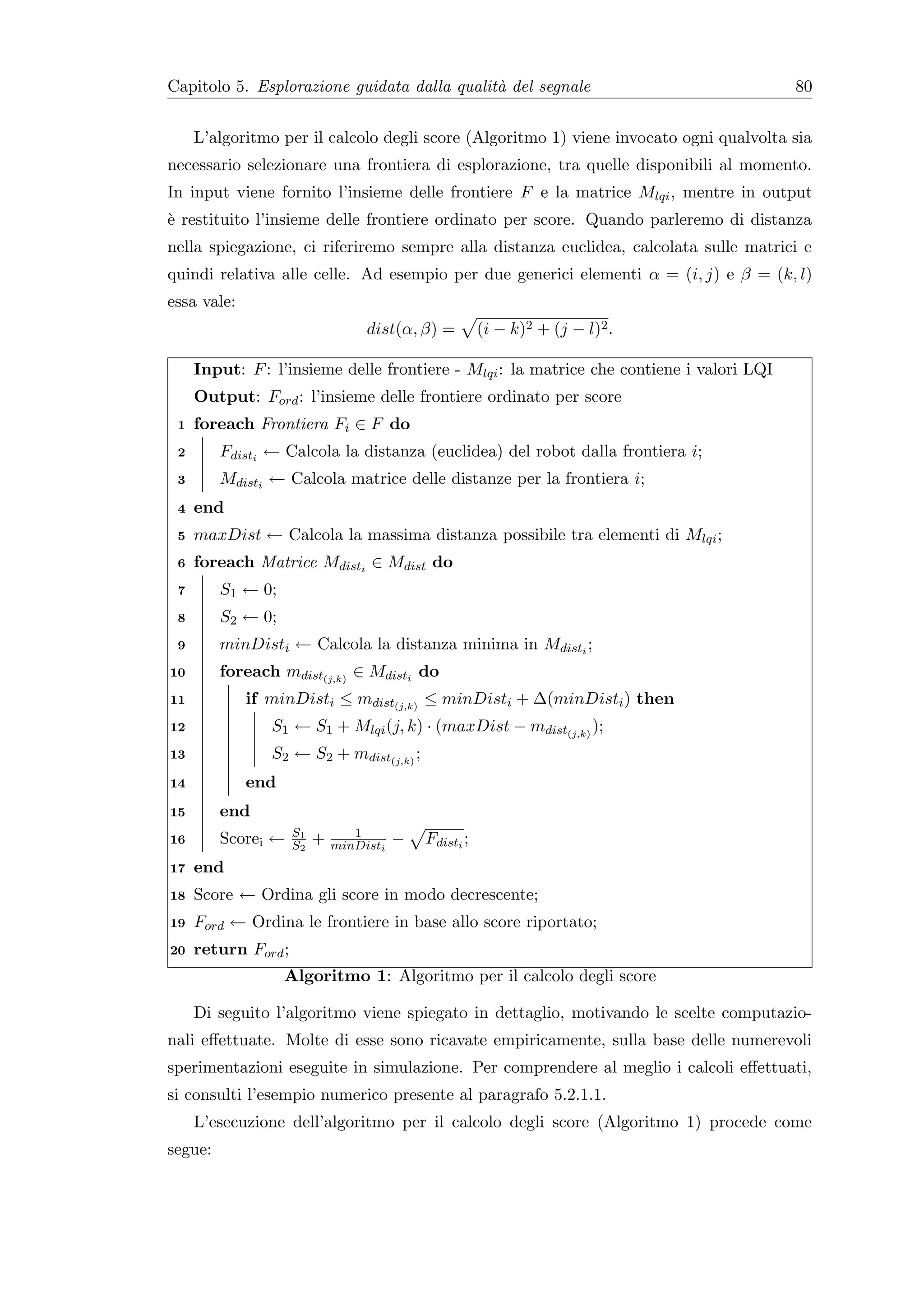

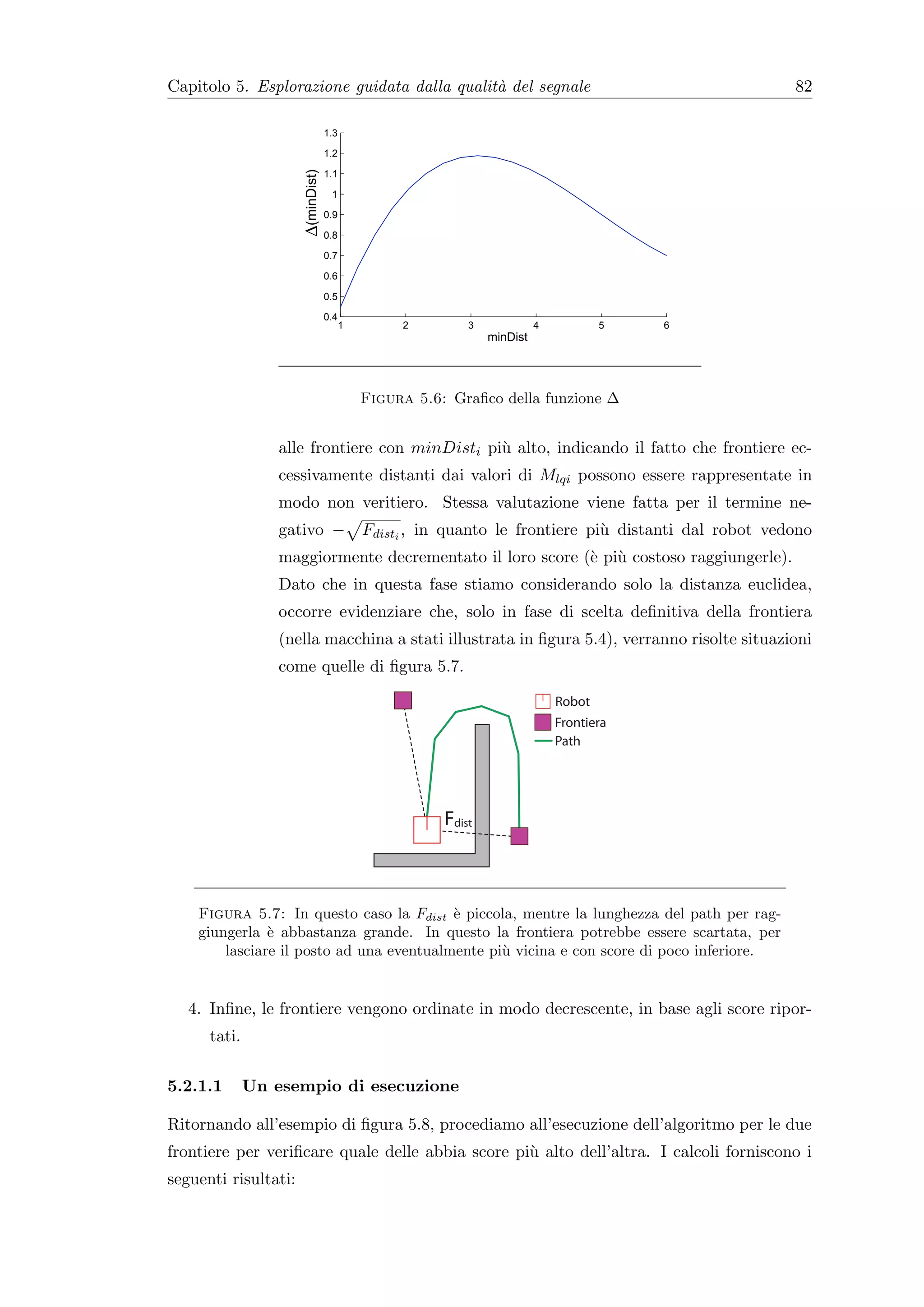
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 83
Robot
156 Frontiera
Celle relative a F1
163 175 minDist1 F1 Celle relative a F2
Obiettivo
151 159 178
Fdist1
121 144 162
minDist2
Fdist
2
F2
Figura 5.8: Calcolo degli score per le frontiere
√ √
• Fdist = [ 8 8 ]
5.01 N.D. N.D. N.D. N.D. N.D. N.D.
N.D.
4 3 N.D. N.D. N.D. N.D.
N.D. 4.12 3.16 2.23 N.D. N.D. N.D.
• Mdist1 =
5.38 4.47 N.D. 2.82 N.D. N.D. N.D.
N.D. N.D. N.D. N.D. N.D. N.D. N.D.
N.D. N.D. N.D. N.D. N.D. N.D. N.D.
5.01 N.D. N.D. N.D. N.D. N.D. N.D.
N.D.
4 4.12 N.D. N.D. N.D. N.D.
N.D. 3 3.16 3.60 N.D. N.D. N.D.
Mdist2 =
2.23 2 N.D. 2.82 N.D. N.D. N.D.
N.D. N.D. N.D. N.D. N.D. N.D. N.D.
N.D. N.D. N.D. N.D. N.D. N.D. N.D.
√
• minDist1 = 5 = 2.23 e minDist2 = 2
• ∆(minDist1 ) = 0.95 e ∆(minDist2 ) = 1
• F1 : 2.23 ≤ mdist(j,k) ∈ Mdist1 ≤ 3.18
– Mdist(2,3) = 3 ⇒ Mlqi(2,3) = 175
– Mdist(3,3) = 3.16 ⇒ Mlqi(3,3) = 159
– Mdist(3,4) = 2.23 ⇒ Mlqi(3,4) = 178
– Mdist(4,4) = 2.82 ⇒ Mlqi(4,4) = 162](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-97-2048.jpg)
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 84
• F2 : 2 ≤ mdist(j,k) ∈ Mdist2 ≤ 3
– Mdist(4,2) = 2 ⇒ Mlqi(4,2) = 144
– Mdist(3,2) = 3 ⇒ Mlqi(3,2) = 141
– Mdist(4,1) = 2.23 ⇒ Mlqi(4,1) = 122
• maxDist = (1 − 6)2 + (1 − 7)2 = 9.21
175·6.21+159·6.05+178·6.97+162·6.38
• LQI 1 = 6.21+6.05+6.97+6.38 = 168.8
1
√
Score1 = 168.8 + 2.23 − 2.82 = 167.36
144·7.21+151·6.21+121·6.97
• LQI 2 = 7.21+6.21+6.97 = 138.26
1
√
Score2 = 138.26 + 2 − 2.82 = 137.08
La frontiera con lo score maggiore risulta essere F1 , che verr` pertanto selezionata come
a
target dal sottosistema di navigazione del robot. Rimane valido in ogni caso il ragio-
namento descritto al paragrafo precedente, che tiene in considerazione la lunghezza del
percorso calcolato dal path planner verso il punto rappresentante della frontiera.
Un aspetto rilevante dell’algoritmo, ` la capacit` di uscire facilmente dai massimi
e a
locali, situazioni che possono facilmente presentarsi in approcci di tipo a gradiente o a
campi di potenziale. L’accumularsi delle letture durante lo spostamento verso le fron-
tiere, aggiorna la conoscenza che il robot ha della mappa, permettendogli di scartare
ad ogni passo le zone che in precedenza apparivano come le migliori, ma che una volta
raggiunte riportano un basso valore LQI.
5.3 Possibili scenari
In questa sezione vengono descritti alcuni degli scenari in cui l’approccio presentato pu`
o
dimostrare la sua utilit`.
a
5.3.1 Rendezvous
Il problema del rendezvous [DR97, ZLV07] consiste nell’incontro, da parte di due o pi`
u
agenti, in un punto e ad un orario ben determinato. Nei sistemi multi-robot avere questo
` un bisogno inerente. La possibilit` di incontrarsi facilita innanzitutto la localizzazio-
e a
ne e facilita il coordinamento nell’esplorazione di grandi ambienti, riducendo il tempo
necessario al completamento.
Nel nostro caso, i punti selezionati per il rendezvous (chiamati anche landmark ),
possono essere pensati come dei nodi ZigBee lasciati nell’ambiente o installati sui robot.
Dato che ogni robot possiede un ricevitore, utilizzando le informazioni sul LQI e un’op-
portuna euristica ` possibile raggiungere il landmark, a patto ovviamente che esso non
e](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-98-2048.jpg)
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 85
sia in condizioni di mobilit`. Considerata l’autonomia energetica e soprattutto il costo
a
contenuto di questi dispositivi, questa situazione ` facilmente realizzabile.
e
Va aggiunto che in scenari di rendezvous esistono due problemi a priori, ovvero come
scegliere il landmark e quale landmark selezionare dall’insieme di quelli potenzialmente
disponibili, temi che vanno oltre gli scopi di questa tesi.
5.3.2 Rescue robots
Nel campo della robotica di soccorso e, in particolare, in ambito Search and Rescue
[HSI+ 99, CFIN07, MNG06, NA07], ` facile immaginare come informazioni sulla loca-
e
lizzazione di punti di interesse (ostacoli, feriti, punti di raccolta, altri robot) possano
divenire di estrema importanza per accelerare i tempi di esplorazione di aree devastate,
con la conseguenza di aumentare la probabilit` di salvare anche vite umane. Si compren-
a
de inoltre quanto ci` sia di interesse primario in ambienti indoor (uffici, abitazioni), o
o
dove comunque non c’` la possibilit` di utilizzare altri sistemi di posizionamento (come
e a
ad esempio GPS).
Considerate le possibilit` di miniaturizzazione che possono essere raggiunte nella
a
produzione di dispositivi ZigBee, possiamo pensare ad uno scenario in cui ogni per-
sona indossi un ricevitore e che, nel caso di incidenti o devastazioni esso possa essere
interrogato, in modo da facilitare il raggiungimento della vittima stessa. Ad esempio,
tali situazioni possono verificarsi in impianti industriali ad alto rischio, dove possono
avvenire incendi, cedimenti strutturali o emissioni di sostanze tossiche.
Nelle squadre multi-robot, l’algoritmo di esplorazione guidata pu` aiutare un robot
o
a trovare un altro membro della squadra in difficolt`, perch´ esso fornisce funzionalit`
a e a
particolari che l’altro non possiede (ad esempio, un robot “demolitore”, potrebbe riuscire
a liberare un passaggio bloccato da eventuali ostruzioni).
5.3.3 Deployment di reti ad-hoc
Sempre per quanto riguarda scenari di soccorso robotico, un’idea interessante ` quella
e
di sfruttare l’approccio presentato per gestire efficientemente il deployment di una rete
di comunicazione wireless ad-hoc, in situazioni di emergenza [RB05]. In molti casi, la
presenza di una infrastruttura di rete, consente il controllo e monitoraggio da parte
dell’operatore esterno, permettendo inoltre di mantenere le comunicazioni tra le squadre
di robot distanti [HMS02].
Il problema che si presenta, ` quello di massimizzare la copertura della rete, mi-
e
nimizzando il numero di nodi necessari. Apportando alcune modifiche all’algoritmo
presentato, ` possibile far trovare autonomamente al robot le zone in cui la qualit` del
e a
segnale ` pi` bassa, considerando ovviamente una mappa del LQI per ogni dispositi-
e u
vo e ragionando sull’intersezione delle stesse. In questo modo ` come ci trovassimo in
e](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-99-2048.jpg)
![Capitolo 5. Esplorazione guidata dalla qualit` del segnale
a 86
una logica invertita rispetto al problema originale, cercando di scegliere le frontiere che
minimizzano il LQI.
5.3.4 Sorveglianza
In scenari di sorveglianza mediante robot mobili [HBB+ 00], l’impiego dell’algoritmo
di esplorazione pu` fornire vantaggi per il monitoraggio di oggetti che frequentemente
o
vengono cambiati di posizione. Si pensi ad esempio a delle telecamere mobili, in grado
di rilevare condizioni di allarme e che sono equipaggiate con un dispositivo ZigBee; il
robot pu` raggiungere pi` efficientemente il luogo in cui si ` verificato l’evento, senza
o u e
conoscenza a priori sulla posizione della telecamera, che pu` quindi essere spostata a
o
seconda delle necessit`, senza il bisogno ogni volta, di registrare su una mappa questi
a
cambiamenti.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-100-2048.jpg)
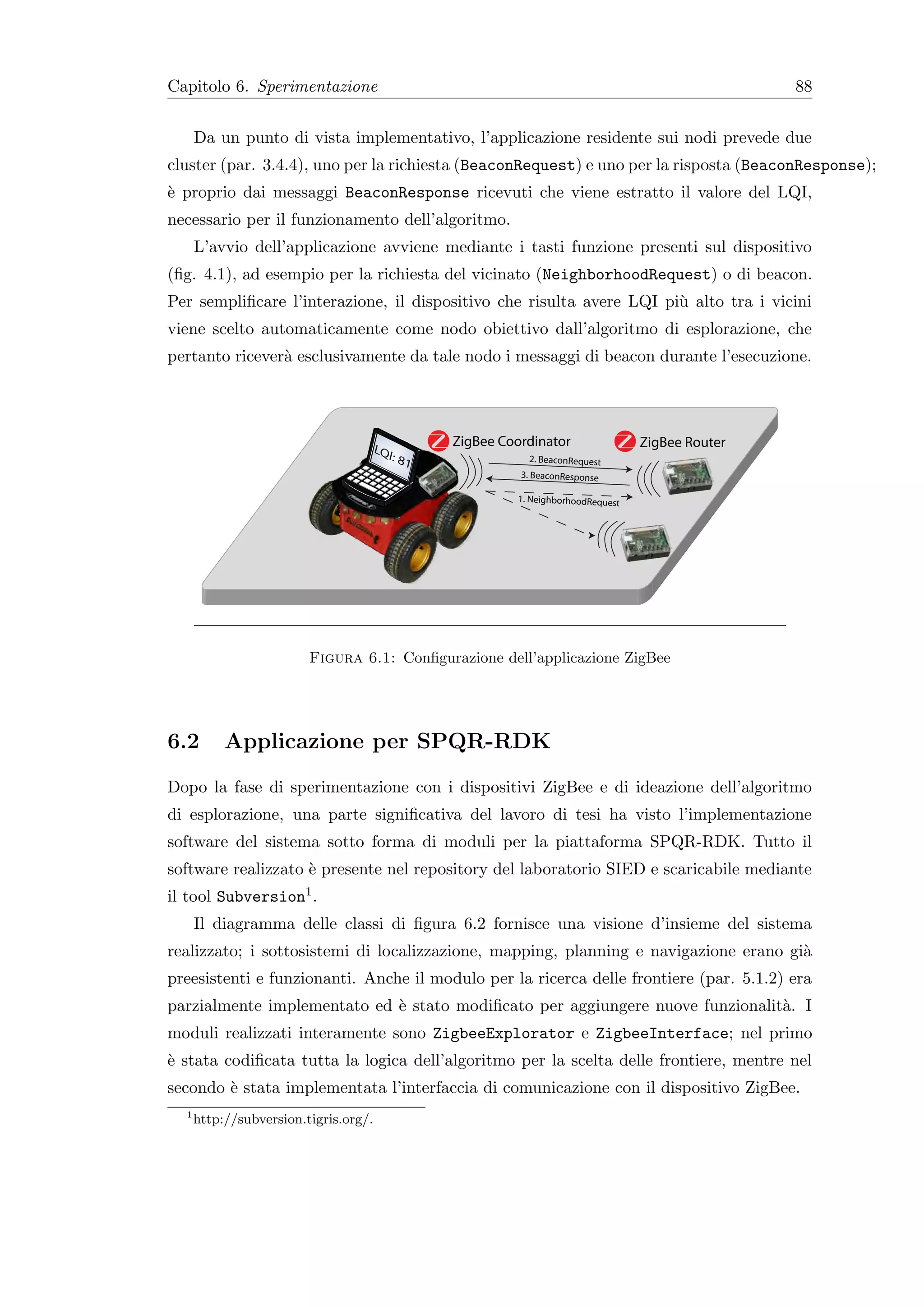
![Capitolo 6. Sperimentazione 89
FrontierFinder Navigator Mapping
ZigbeeExplorator Path Planner
Module
ZigbeeExplorator ZigbeeInterface
Module
Frontier ZigbeeInterface
-score
-distance
+readLqiValue()
LqiGatherer
-lqiMatrix FrontierChooser StaticLqiMap ZigbeeDriver
+updateLqiValue() -lqiMap
+computeFrontiersRank() +readLqiValue() +readLqiValue()
Figura 6.2: Diagramma delle classi del sistema
Il diagramma delle classi, sebbene incompleto di alcuni dettagli, aiuta a comprendere
bene le dipendenze tra i moduli e le loro responsabilit` nell’intero sistema. Nei para-
a
grafi successivi essi verranno descritti dettagliatamente, prestando attenzione ad alcuni
dettagli implementativi e alle problematiche che gradualmente si sono presentate.
6.2.1 Modulo FrontierFinder
La ricerca delle frontiere ` una operazione fondamentale durante l’esplorazione in am-
e
bienti sconosciuti, in quanto gradualmente fornisce nuovi punti della mappa da visitare.
Esse sono rilevate trovando le regioni di confine tra la parte di mappa inesplorata e quella
esplorata; quelle con un numero sufficiente di punti vengono considerate frontiere.
Nel nostro caso, il modulo di ricerca delle frontiere era gi` presente, anche se par-
a
zialmente implementato. Esso era in grado di fornire, per ogni frontiera, l’insieme dei
punti che la costituiva; dal punto di vista della navigazione per`, ` utile trovare anche
o e
un rappresentante di questi punti, in modo che sia possibile fornirlo come target al ro-
bot. Un approccio comune [Yam97] ` quello di calcolare il centroide (o baricentro) dei
e
punti, dato che, considerata la natura convessa delle regioni di frontiera, tale punto per
definizione ricade all’interno della parte di mappa esplorata.
Questo ragionamento, anche se corretto, porta in alcune situazioni particolari a tro-
vare i rappresentanti troppo vicini agli ostacoli. Per questo motivo, ` stata sfruttata una
e
informazione fornita dal modulo di mapping, la cosiddetta distance map; sostanzialmen-
te essa ` una mappa in cui ogni punto indica la distanza dall’ostacolo pi` vicino (fig.
e u
6.3(a)). In questo modo, il rappresentante della frontiera, pu` essere trovato calcolando
o](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-103-2048.jpg)

![Capitolo 6. Sperimentazione 91
LQI in ricezione. Inoltre, considerando i risultati di figura 4.6, ` possibile introdurre
e
una funzione di rumore gaussiano additiva che faccia variare leggermente i valori della
mappa statica, per rendere pi` realistiche le letture del valore LQI2 .
u
(a) Posizioni per le misurazioni (b) Mappa del LQI generata con interpo-
lazione bicubica
Figura 6.4: Generazione della mappa statica per il LQI
L’interfacciamento fisico al dispositivo ` stato tutt’altro che elementare, in quanto i
e
driver esistenti erano solo per piattaforma Windows. Ci` ha richiesto la modifica e la
o
compilazione di un driver per Linux di un altro produttore, adattandolo al dispositivo a
nostra disposizione. Una volta completata questa operazione, ` stato possibile estrarre
e
il valore del LQI scrivendo un piccolo parser per le stringhe ricevute sulla porta seriale.
In condizioni dinamiche inoltre, come ` possibile osservare in figura 4.9, l’andamento
e
del LQI presenta degli outlier che devono essere filtrati. Per completare tutto ci` in
o
tempo reale occorre una computazione efficiente come una media o un filtro di Kalman
[Kal60]. Per i nostri scopi ` stato sufficiente eseguire una media mobile del tipo:
e
LQI t = α · LQIt + (1 − α) · LQI t−1 ,
dove α ∈ R e 0 ≤ α ≤ 1. Tale parametro determina quanto pesa il valore LQI appena
letto rispetto alla media ottenuta al passo precedente. Negli esperimenti effettuati,
ponendo α = 0.85, si ottiene un sufficiente smoothing sui valori rilevati, senza necessit`
a
di implementare altri filtri pi` complessi.
u
Come ` possibile osservare in figura 6.2, il modulo ` stato progettato per essere
e e
trasparente rispetto al metodo utilizzato per leggere il LQI, che sia proveniente dalla
mappa statica o dal dispositivo reale. Il metodo readLqiValue che viene eseguito a
run-time ` specificato nel file di configurazione, mediante una variabile booleana.
e
2
In questo modo, se il robot transita pi` volte nella stessa posizione della mappa, ottiene valori di
u
LQI differenti.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-105-2048.jpg)
![Capitolo 6. Sperimentazione 92
6.2.3 Modulo ZigbeeExplorator
In questo modulo ` racchiusa tutta la logica dell’algoritmo, descritta al paragrafo 5.2. In
e
particolare, nella classe principale ZigbeeExplorator ` stata implementata la macchina
e
a stati di figura 5.4; il suo scopo principale ` coordinare l’esecuzione del FrontierChoo-
e
ser, per l’assegnazione dello score alle frontiere (rappresentate dalla classe Frontier), e
del modulo di navigazione, al fine di raggiungere di volta in volta il target selezionato. Il
modulo ` impostato per essere schedulato ogni 500 ms, che risulta anche l’intervallo con
e
cui l’oggetto LqiGatherer ha la responsabilit` di registrare i dati del LQI, provenienti
a
dalla ZigbeeInterface.
6.2.4 Moduli di navigazione
I moduli per la navigazione autonoma in ambiente sconosciuto erano gi` implementati e
a
funzionanti. L’approccio scelto ` una navigazione a due livelli, in cui viene impiegato un
e
path planner globale (basato sull’algoritmo A∗ ) e un controllore di basso livello (motion
planner ) che suddivide il path in sottobiettivi di rapida attuazione, in cui il robot deve
seguire la traiettoria evitando eventuali ostacoli. In questo modo il movimento del robot
` funzione sia delle percezioni sensoriali che della posizione relativa dall’obiettivo.
e
6.2.5 Moduli di localizzazione e mapping
Per eseguire efficientemente i task di navigazione, sono di primaria importanza i moduli
di localizzazione e mapping, che si occupano di stimare consistentemente la posizione
del robot e la mappa dell’ambiente esplorato, a partire dalle rilevazioni dei sensori (scan
matching [MLM05]). In questo modulo viene costruita anche la distance map, che viene
utilizzata per pesare opportunamente il centroide della frontiera (par. 6.2.1).
6.3 Simulazione
Nello sviluppo e sperimentazione dell’algoritmo, ha avuto importanza rilevante impiegare
un adeguato ambiente di simulazione, nel quale ` stato possibile verificare velocemente
e
le prestazioni su diversi ambienti, senza utilizzare necessariamente il robot reale.
La piattaforma impiegata ` stata esclusivamente Player/Stage, in quanto era suffi-
e
ciente una rappresentazione bidimensionale dell’ambiente da esplorare. La configurazio-
ne del robot impiegato ` molto simile a quella reale; ` stato utilizzato un modello del
e e
Pioneer P2-AT, con laser scanner Sick. Per emulare la lettura istantanea del valore del
LQI dal dispositivo, la mappa generata con interpolazione ` stata sovrapposta idealmen-
e
te a quella del simulatore, facendo in modo che le coordinate del pixel sulla mappa LQI
coincidano con la posizione del robot rispetto alla mappa dell’ambiente, come ` possibile
e](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-106-2048.jpg)


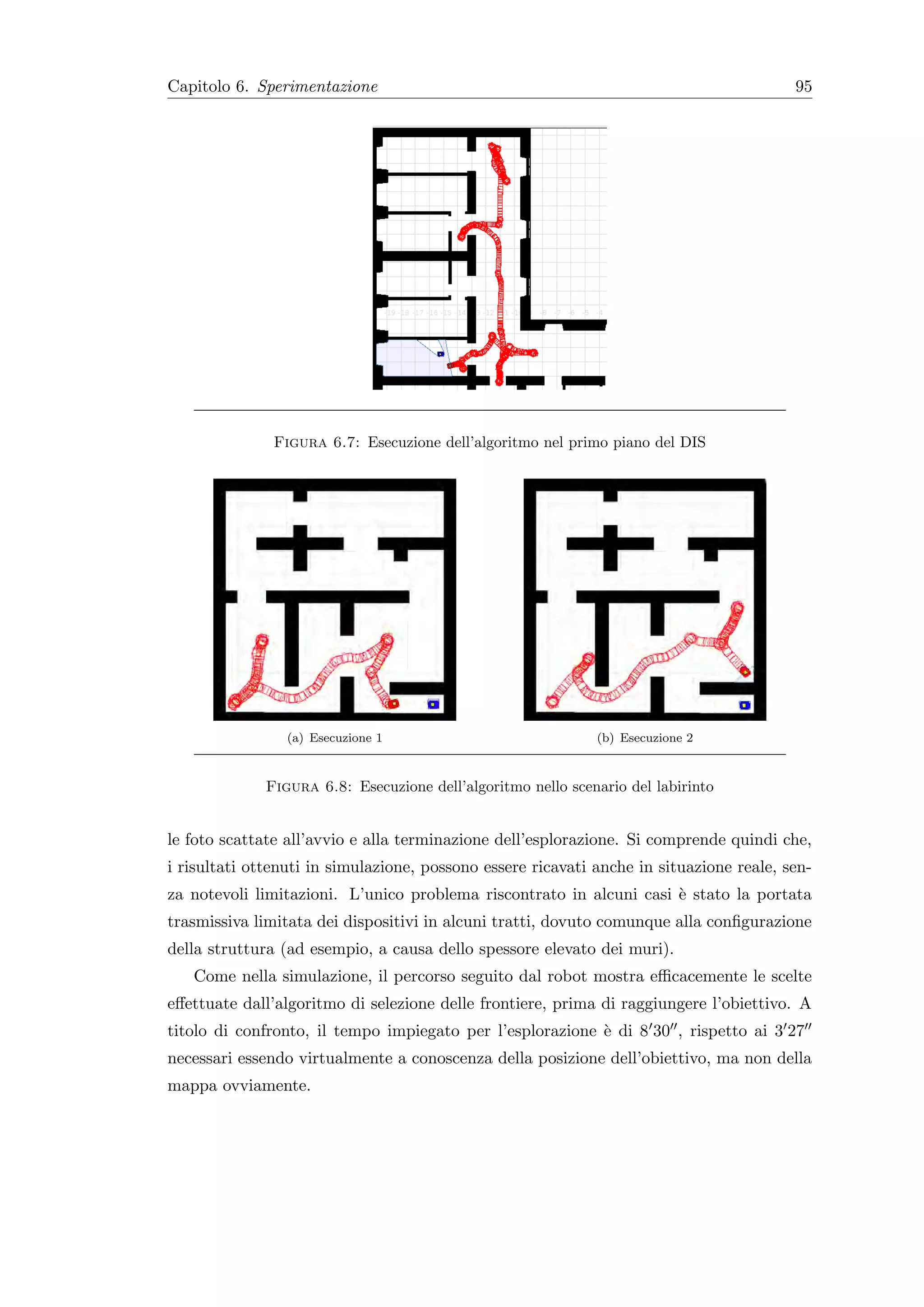


![Capitolo 7
Conclusioni e sviluppi futuri
7.1 Sintesi dei risultati ottenuti
In questo lavoro di tesi ` stato progettato, implementato e sperimentato un algoritmo
e
per l’esplorazione di ambienti semistrutturati da parte di robot mobili autonomi, basato
sulla potenza del segnale ricevuto da dispositivi ZigBee. La sua realizzazione ha richiesto
la trattazione di numerose problematiche; in primo luogo la scelta dei dispositivi da
utilizzare e lo studio dello standard ZigBee per le reti LR-WPAN, in particolar modo
gli strati MAC, rete e applicazione. Successivamente, contemporaneamente allo studio
dello stato dell’arte nei metodi di localizzazione wireless, sono state effettuate una serie
di sperimentazioni in ambienti indoor e outdoor, al fine di valutare le caratteristiche
trasmissive dei dispositivi selezionati per il progetto. I risultati di questi test, hanno
sicuramente aiutato ad osservare il problema originale sotto un differente punto di vista,
consentendo di sfruttare le informazioni ricavate sulla potenza del segnale ricevuta, non
pi` per realizzare un sistema di localizzazione wireless, ma bens` per ricavare indicazioni
u ı
utili durante l’esplorazione di ambienti sconosciuti da parte di robot mobili.
L’algoritmo pensato si presenta come un’euristica basata sul LQI (Link Quality In-
dicator), un dato che rappresenta adeguatamente la qualit` del collegamento tra due
a
dispositivi ZigBee, dove il trasmettitore individua il punto di interesse da segnalare e
il ricevitore ` installato sul robot, in grado di ricevere tali segnalazioni. Come in altri
e
approcci [Yam98, BMF+ 00, KPN, MTK, SB03], l’esplorazione viene eseguita visitando
ad ogni passo visitando le frontiere disponibili; a differenza di essi per`, la selezione della
o
frontiera migliore, ad ogni passo, ` guidata dalle informazioni raccolte sulla variazione
e
del LQI, che spesso forniscono una buona stima del vantaggio ricavabile dalla scelta.
Una tale funzionalit` pu` risultare di notevole interesse, ad esempio, nella soluzione di
a o
problemi di rendezvous tra robot [DR97] o per rendere pi` efficiente la ricerca in ambito
u
Search and Rescue [BCC+ 04].
98](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-112-2048.jpg)
![Capitolo 7. Conclusioni e sviluppi futuri 99
Il sistema ` stato implementato in C++, sotto forma di moduli per il framework
e
SPQR-RDK, permettendo di sperimentare velocemente le prestazioni dell’algoritmo, sia
in ambiente simulato che in condizioni reali. I test effettuati hanno dimostrato la validit`
a
dell’approccio, mostrando i benefici che si ottengono nella maggior parte dei casi ana-
lizzati. L’informazione derivante dalla qualit` del segnale ricevuto pu` essere pertanto
a o
sfruttata positivamente, risultando un buon criterio per la scelta di frontiere, migliore
sicuramente della scelta casuale o greedy (ad esempio, scegliendo la frontiera pi` vicina
u
[YSA98]).
Da un punto di vista personale, posso sicuramente essere soddisfatto dei risultati
ottenuti e delle capacit` acquisite durante tutto il periodo di sviluppo della tesi. Le
a
tematiche affrontate sono risultate di notevole interesse, con la possibilit`, inoltre, di
a
sperimentare i propri studi su un robot reale, oltre che in simulazione.
7.2 Sviluppi futuri ed estensioni
Il sistema presentato pone le fondamenta per la soluzione di un problema base: il rag-
giungimento da parte del robot di un punto nell’ambiente, in cui ` presente un dispositivo
e
che invia dei messaggi di tipo beacon. Tale scenario pu` essere certamente esteso, im-
o
maginando situazioni nel quale diversi robot esplorano l’ambiente e sono equipaggiati
con nodi ZigBee; le funzionalit` dell’algoritmo possono essere sfruttate per effettuare dei
a
rendezvous o coordinare l’esplorazione al fine di aumentare l’area ricoperta nell’intervallo
di tempo disponibile. I dispositivi possono essere rilasciati dinamicamente da un robot
esploratore che magari ` pi` veloce, indicando il percorso da seguire agli altri membri
e u
della squadra perch´ pi` lenti o zone da evitare perch´ gi` esplorate (in questo caso la
e u e a
logica dell’algoritmo andrebbe ovviamente invertita, in modo da fornire le zone con LQI
pi` basso).
u
Possono essere aggiunte inoltre, informazioni sulla topologia dell’ambiente mediante
una semantica ad alto livello, al fine di accelerare la ricerca dei punti di interesse; ad
esempio, se si intuisce di trovarsi in un corridoio, conviene prima effettuare un’esplo-
razione preliminare dello stesso al fine di stimare con maggiore accuratezza le possibili
stanze dove l’obiettivo pu` trovarsi.
o
Altri miglioramenti possono essere introdotti, tenendo conto della variazione del LQI
(praticamente il gradiente del LQI) durante lo spostamento tra una frontiera e l’altra,
ad esempio aumentando lo score per quelle che si trovano nel verso di incremento del
LQI o annullando il raggiungimento di una frontiera se l’andamento ` eccessivamente
e
decrescente, gi` durante la fase di navigazione verso di essa.
a](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-113-2048.jpg)
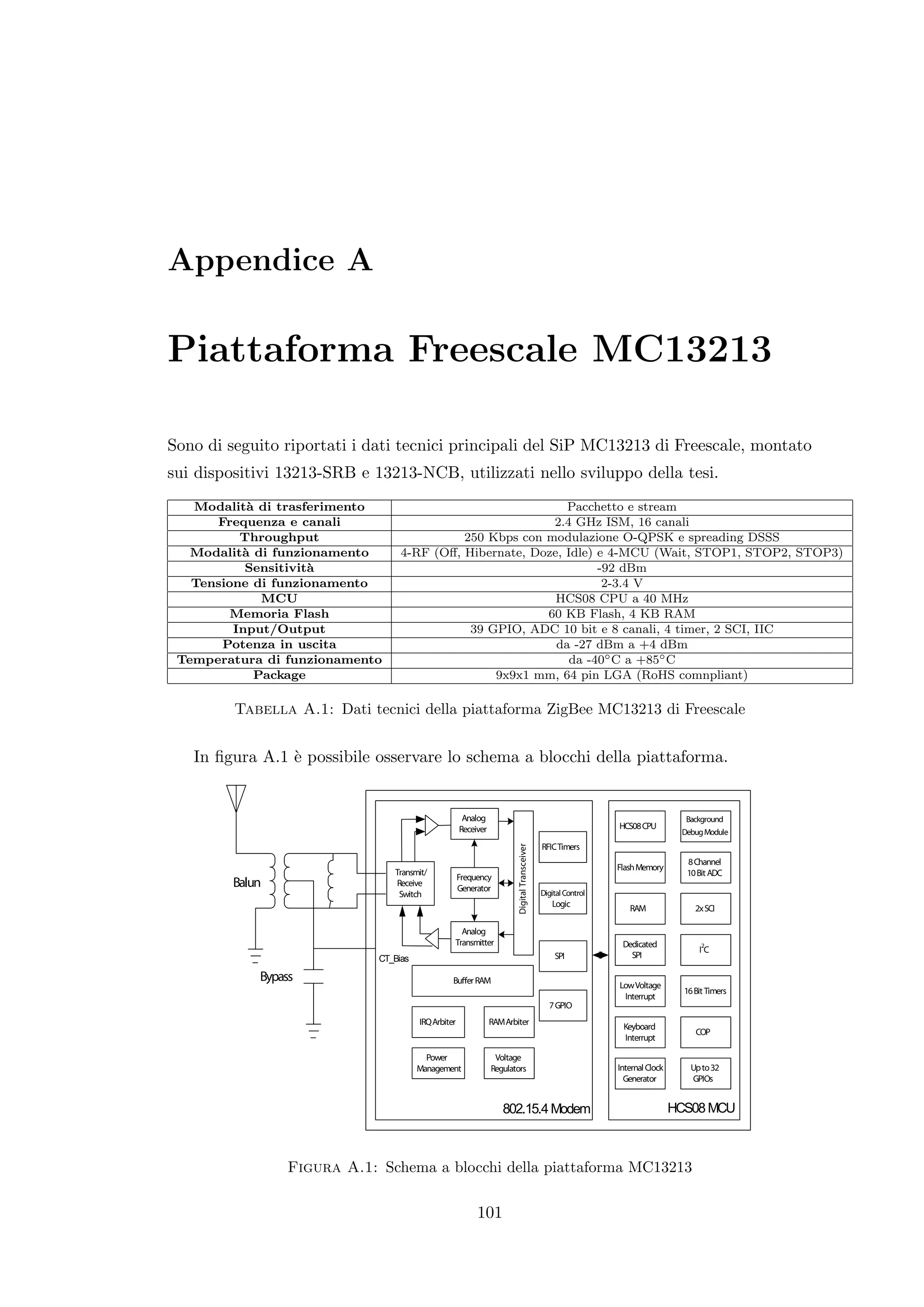
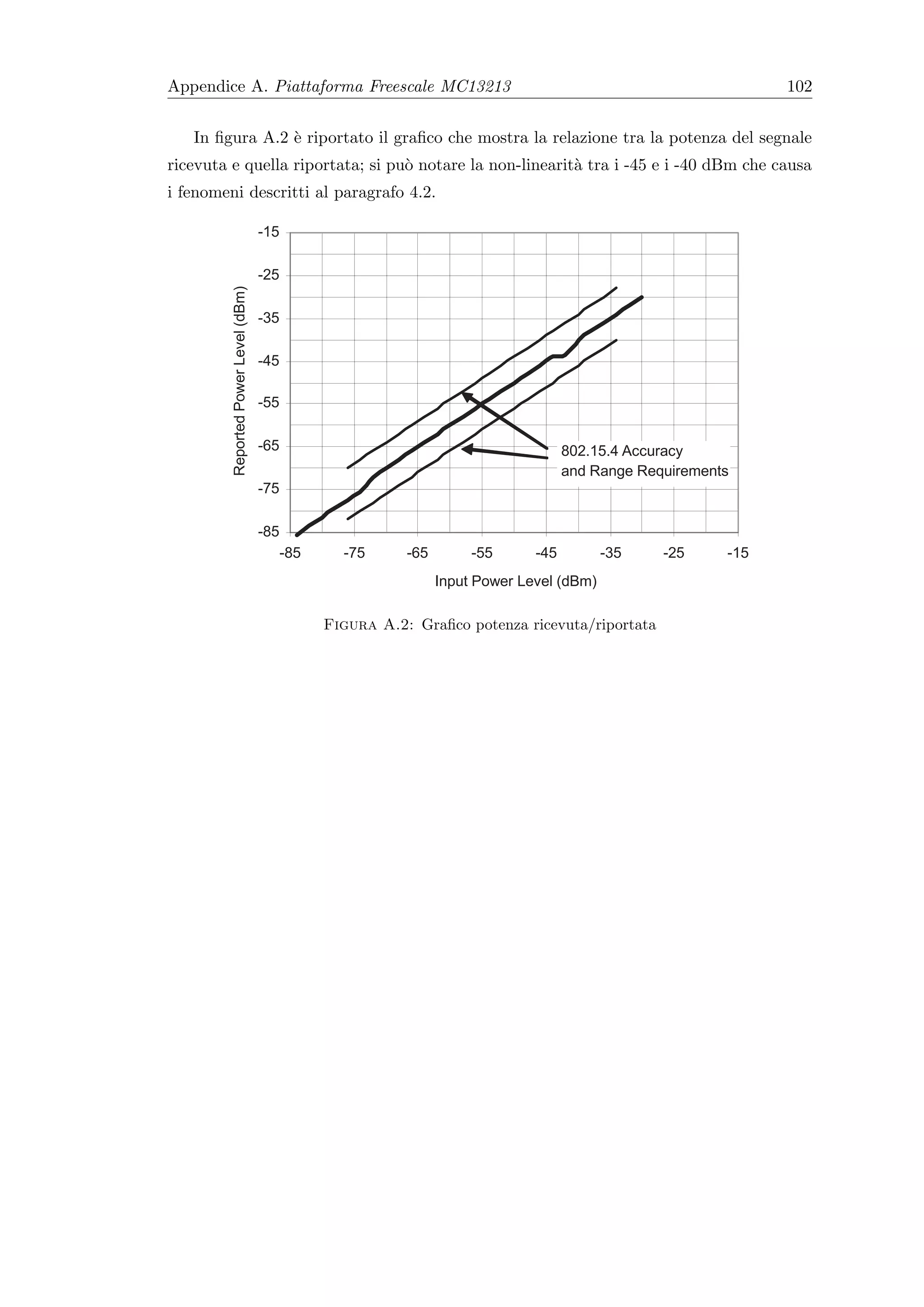
![Bibliografia
[Aam06] K. Aamodt. Texas Instruments CC2431 Location Engine - Application
Note AN042. Texas Instruments, 2006. http://focus.ti.com/lit/an/
swra095/swra095.pdf.
[BB82] Dana H. Ballard and Christopher M. Brown. Computer Vision. Prentice
Hall, 1982.
[BCC+ 04] S. Bahadori, D. Calisi, A. Censi, A. Farinelli, G. Grisetti, L. Iocchi, and
D. Nardi. Intelligent Systems for Search and Rescue. In Proceedings of
Intelligent Robots and Systems Workshop Urban search and rescue: from
Robocup to real world applications, 2004.
[BEFW97] J. Borenstein, H. Everett, L. Feng, and D. Wehe. Mobile Robot Positio-
ning: Sensors and Techniques. Journal of Robotic Systems, 14(4):231–249,
1997.
[BFDW03] F. Bourgault, T. Furukawa, and H.F. Durrant-Whyte. Coordinated De-
centralized Search for a Lost Target in a Bayesian World. In Proceedings
of IEEE/RSJ International Conference on Intelligent Robots and Systems,
2003.
[BGGT07] Jan Blumenthal, Ralf Grossmann, Frank Golatowski, and Dirk Timmer-
mann. Weighted Centroid Localization in Zigbee-based Sensor Networks.
In IEEE International Symposium on Intelligent Signal Processing, 2007.
[BHE00] N. Bulusu, J. Heidemann, and D. Estrin. GPS-less Low Cost Outdoor
Localization For Very Small Devices. IEEE Personal Communication
Magazine, 7(5):28–34, 2000.
[BMF+ 00] W. Burgard, M. Moors, D. Fox, R. Simmons, and S. Thrun. Collabo-
rative Multi-Robot Exploration. In Proceedings of IEEE International
Conference on Robotics and Automation, 2000.
[BP00] Paramvir Bahl and Venkata N. Padmanabhan. RADAR: An In-Building
RF-based User Location and Tracking System. In IEEE INFOCOM, 2000.
103](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-117-2048.jpg)
![Bibliografia 104
[CDNDW01] S. Clark, G. Dissanayake, P. Newman, and H.F. Durrant-Whyte. A So-
lution to Simultaneous Localization and Map Building (SLAM) Problem.
IEEE Journal of Robotics and Automaton, 17(3), 2001.
[CFIN07] Daniele Calisi, Alessandro Farinelli, Luca Iocchi, and Daniele Nardi. Multi-
objective Exploration and Search for Autonomous Rescue Robots. J. Field
Robot., 24(8-9):763–777, 2007.
[Cro07] CrossBow Technology. Avoiding RF Interference Between WiFi and
ZigBee, 2007. http://www.xbow.com/Products/Product_pdf_files/
Wireless_pdf/ZigBeeandWiFiInterference.pdf.
[Doy95] Alexander Benjamin Doyle. Algorithms and Computational Techniques for
Robot Path Planning. PhD thesis, School of Electronic Engineering and
Computer Systems, University of Wales, Bangor, 1995.
[DR97] Gregory Dudek and Nicholas Roy. Multi-Robot Rendezvous in Unkno-
wn Environments. In Proceedings of AAAI International Conference on
Artificial Intelligence, 1997.
[DWB06a] H.F. Durant-White and T. Bailey. Simultaneous Localization and Map-
ping: Part I. IEEE Robotics and Automation Magazine, pages 99–108,
June 2006.
[DWB06b] H.F. Durant-White and T. Bailey. Simultaneous Localization and Map-
ping: Part II. IEEE Robotics and Automation Magazine, pages 108–117,
Semptember 2006.
[Erg04] Sinem Coleri Ergen. ZigBee/IEEE 802.15.4 Summary. Technical report,
Berkeley, September 2004.
[Eve95] H. R. Everett. Sensors for Mobile Robots. A. K. Peters, 1995.
[FBT99] D. Fox, W. Burgard, and S. Thrun. Markov Localization for Mobile Robots
in Dynamic Environments. Journal of Artificial Intelligence Research, 11,
1999.
[FGI05] A. Farinelli, G. Grisetti, and L. Iocchi. SPQR-RDK: a Modular Framework
for Programming Mobile Robots. In Proceedings of International RoboCup
Symposium 2004, pages 653–660, 2005.
[GBL01] H.H. Gonz´les-Banos and J.C. Latombe. Navigation Strategies for Ex-
a
ploring Indoor Environments. International Journal of Robotics Research,
2001.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-118-2048.jpg)
![Bibliografia 105
[GVS+ 01] B.P. Gerkey, R.T. Vaughan, K. Støy, A. Howard, M.J. Matari´, and G.S.
e
Sukhatme. Most Valuable Player: A Robot Device Server for Distribu-
ted Control. In IEEE/RSJ Intl. Conf. on Intelligent Robots an Systems
(IROS), pages 1226–1231, October 2001.
[HBB+ 00] D. Hougen, S. Benjaafar, J. Bonney, J. Budenske, M. Dvorak, M. Gini,
H. French, D. Krantz, P. Li, F. Malver, B. Nelson, N. Papanikolopou-
los, P. Rybski, S. Stoeter, R. Voyles, and K. Yesin. A Miniature Robo-
tic System for Reconnaissance and Surveillance. In Proceedings of IEEE
International Conference on Robotics and Automation, pages 501–507,
2000.
[HHB+ 03] T. He, C. Huang, B. Blum, J. Stankovic, and T. Abdelzaher. Range-free
Localization Schemes in Large Scale Sensor Networks, 2003.
[HLD07] J.B. Hayet, F. Lerasle, and M. Devy. A Visual Landmark Framework for
Mobile Robot Navigation. Image and Vision Computing, 25(8):1341–1351,
August 2007.
[HMS02] Andrew Howard, Maja J. Mataric, and Gaurav S. Sukhatme. An In-
cremental Self- Deployment Algorithm for Mobile Sensor Networks. In
Autonomous Robots, special issue on Intelligent Embedded Systems, 2002.
[HSI+ 99] Kitano H., Tadokoro S., Noda I., Matsubara H., Takahashi T., Shinjou
A., and Shimada S. RoboCup Rescue: Search and Rescue in Large-scale
Disasters as a Domain for Autonomous Agents Research. In Proceedings of
IEEE International Conference on Systems, Man and Cybernetics, 1999.
[IEE06] IEEE Standards 802 Part 15.4. Wireless Medium Access Control (MAC)
and Physical Layer (PHY) Specifications for Low-rate Wireless Perso-
nal Area Networks (WPANs), June 2006. http://standards.ieee.org/
getieee802/download/802.15.4-2003.pdf.
[IR01] ITU-R. Propagation Data and Prediction Methods for the Planning of
Indoor Radio Communication Systems and the Radio Local Area Networks
in the Frequency Range 900 MHz to 100 GHz, 2001.
[Kal60] R.E. Kalman. A New Approach to Linear Filtering and Prediction
Problems. Journal of Basic Engineering, 1960.
[KPN] Alexander Kleiner, Johann Prediger, and Bernhard Nebel. RFID
Technology-based Exploration and SLAM for Search and Rescue.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-119-2048.jpg)
![Bibliografia 106
[Lan03] Daniel Lang. A Comprehensive Overview About Selected Ad Hoc Net-
working Routing Protocols. http://home.leo.org/~dl/TUM-I0311.pdf,
2003.
[LW04] Konrad Lorincz and Matt Welsh. A Robust, Decentralized Approach
to RF-Based Location Tracking. Technical Report TR-04-04, Harvard
University, 2004.
[Mat92] Maja Mataric. Integration of Representation into Goal-driven Behavior-
based Robots. In IEEE Transactions on Robotics and Automation, 1992.
[MFA07] Guoqiang Mao, Barı¸ Fidan, and Brian D. O. Anderson. Wireless Sensor
s
Network Localization Techniques. Computer Networks, 51(10):2529–2553,
2007.
[MLLH06] Yongguo Mei, Yung-Hsiang Lu, C.S.G. Lee, and Y.C. Hu. Energy-efficient
Mobile Robot Exploration. In Proceedings of the International Conference
on Robotics and Automation, pages 505–511, 2006.
[MLM05] J. Minguez, F. Lamiraux, and L. Montesano. Metric-based Scan Matching
Algorithms for Mobile Robot Displacement Estimation. In Proceedings of
the IEEE International Conference on Robotics and Automation, 2005.
[MNG06] Y. Meng, J.V. Nickerson, and J. Gan. Multi-Robot Cooperation Strate-
gies in a Searching Task with Limited Communication. In Proceedings of
Robotic and Applications, 2006.
[MTK] Apurva Mudgal, Craig Tovey, and Sven Koenig. Analysis of Greedy Robot-
Navigation Methods.
[NA07] Rooker Martijn N. and Birk Andreas. Multi-robot Exploration under
the Constraints of Wireless Networking. Control Engineering Practice,
15(4):435–445, 2007.
[NN01] D. Niculescu and B. Nath. Ad Hoc Positioning System (APS). In
Proceedings of GLOBECOM, November 2001.
[NN03] D. Niculescu and B. Nath. Ad Hoc Positioning System (APS) using AOA.
In IEEE INFOCOM, 2003.
[Pat05] Neal Patwari. Location Estimation in Sensors Networks. PhD thesis,
University of Michigan, 2005.
[PD03] Larry L. Peterson and Bruce S. Davie. Computer Networks: A System
Approach. Morgan Kaufman, 2003.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-120-2048.jpg)
![Bibliografia 107
[Per03] C. Perkins. Ad hoc On-Demand Distance Vector (AODV) Routing, July
2003. http://www.ietf.org/rfc/rfc3561.txt.
[PHP+ 03] N. Patwari, A. O. Hero, M. Perkins, N. S. Correal, and R. J. ODea. Lo-
cation Estimation in Wireless Sensor Networks. In IEEE Transactions on
Signal Processing, volume 51, August 2003.
[Rap01] Theodore Rappaport. Wireless Communications: Principles and Practice.
Prentice Hall PTR, Upper Saddle River, NJ, USA, 2001.
[RB05] Martijn N. Rooker and Andreas Birk. Combining Exploration and Ad-Hoc
Networking in RoboCup Rescue. In Nardi Daniele, Riedmiller Martin,
and Sammut Claude, editors, RoboCup 2004: Robot Soccer World Cup
VIII, volume 3276 of Lecture Notes in Artificial Intelligence (LNAI), pages
236–246. Springer, 2005.
[SACO06] Rajeev Shorey, Kkihebbal L. Ananda, Mun Choon Chan, and Wei Tsang
Ooi. Mobile, Wireless, and Sensor Networks - Technology, Applications,
and Future Directions. John Wiley & Sons, 2006.
[Sau00] Simon R. Saunders. Antennas and Propagation for Wireless
Communications Systems. John Wiley and Sons, 2000.
[SAY99] Alan C. Schultz, William Adams, and Brian Yamauchi. Integrating
Exploration, Localization, Navigation and Planning with a Common
Representation. Autonomous Robots, 6(3):293–308, 1999.
[SB03] C. Stachniss and W. Burgard. Exploring Unknown Environments with
Mobile Robots using Coverage Maps. In Proceedings of the International
Conference on Artificial Intelligence, 2003.
[Sem06] Freescale Semiconductors. Compact Integrated Antennas Designs and
Applications for the MC1319x, MC1320x, and MC1321x, 2006. http:
//www.freescale.com.
[Sem07a] Freescale Semiconductors. MC13211/212/213 ZigBee Compliant Platform
- 2.4 GHz Low Power Transceiver for the IEEE 802.15.4 Standard plus
Microcontroller, 2007. http://www.freescale.com.
[Sem07b] Freescale Semiconductors. MC1321x Evaluation Kit (EVK) - Reference
Manual, 2007. http://www.freescale.com.
[Sey00] John S. Seybold. Introduction to RF propagation. John Wiley and Sons,
2000.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-121-2048.jpg)
![Bibliografia 108
[SHS01] A. Savvides, C. Han, and M. Srivastava. Dynamic Fine-grained Localiza-
tion in Ad-Hoc Networks of Sensors. In Proceedings of ACM MobiCom,
pages 166–179, July 2001.
[SKOM06] Masashi Sugano, Tomonori Kawazoe, Yoshikazu Ohta, and Masayuki Mu-
rata. Indoor Localization System Using RSSI Measurement of Wireless
Sensor Network Based on ZigBee Standard, 2006.
[SN04] Roland Siegwart and Illah R. Nourbakhsh. Introduction to Autonomous
Mobile Robots. MIT Press, 2004.
[SRZF07] Y. Shang, W. Ruml, Y. Zhang, and M. P. J. Fromherz. Localization from
Mere Connectivity. In Fourth ACM International Symposium on Mobile
Ad-Hoc Networking and Computing, June 2007.
[TBF05] S. Thrun, W. Burgard, and D. Fox. Probabilistic Robotics. MIT Press,
2005.
[TFB98] S. Thrun, D. Fox, and W. Burgard. A Probabilistic Approach to Con-
current Mapping and Localization for Mobile Robots. Machine Learning,
31:29–53, 1998.
[TFBD00] S. Thrun, D. Fox, W. Burgard, and F. Dellaert. Robust Monte Carlo
Localization for Mobile Robots. Artificial Intelligence, 128(1-2):99–141,
2000.
[Thr95] S. Thrun. Exploration in Active Learning, 1995.
[TK93] C.J. Tailor and D.J. Kriegman. Exloration Strategies for Mobile Robo-
ts. In Proceedings of the IEEE International Conference on Robotics and
Automation, pages 248–253, 1993.
[TK03] C. Tovey and S. Koenig. Improved Analysis of Greedy Mapping. In Procee-
dings of IEEE International Conference on Intelligent Robots and Systems,
pages 3251–3257, 2003.
[TKT+ 00] Satoshi Tadokoro, Hiroaki Kitano, Tomoichi, Takahashi, Itsuki Noda, Hi-
toshi Matsubara, Atsuhi Shinjoh, Tetsuya Koto, Ikuo Takeuchi, Hironao
Takahashi, Fumitoshi Matsuno, Mitsuo Hatayama, Jun Nobe, and Su-
sumu Shimada. The RoboCup-Rescue Project: A Robotic Approach to
the Disaster Mitigation Problem. In Proceedings of IEEE International
Conference on Robotics and Automation, 2000.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-122-2048.jpg)
![Bibliografia 109
[WLG03] J. Wang, M. Lewis, and J. Gennari. Interactive Simulation of the NIST
USAR Arenas. In IEEE International Conference on Systems, Man, and
Cybernetics, pages 1350–1354, 2003.
[XKC97] Yun Xiaoping and Tan Ko-Cheng. A Wall-following Method for Escaping
Local Minima in Potential Field Based Motion Planning. In Proceedings
of 8th International Conference on Advanced Robotics, 1997.
[Yam97] Brian Yamauchi. A Frontier-Based Approach for Autonomous Explora-
tion. In Proceedings of the IEEE International Conference on Robotics
and Automation, 1997.
[Yam98] Brian Yamauchi. Frontier-based exploration using multiple robots. In
AGENTS ’98: Proceedings of the second international conference on
Autonomous agents, pages 47–53, New York, NY, USA, 1998. ACM.
[YSA98] Brian Yamauchi, Alan Schultz, and Williams Adams. Mobile Robot Ex-
ploration and Map-Building with Continuous Localization. In Procee-
dings of the International Conference on Robotics and Automation, pages
3715–3720, 1998.
[Zig06] ZigBee Alliance. ZigBee-2006 Specification, December 2006. http://www.
zigbee.org/en/spec_download/zigbee_downloads.asp.
[ZKNN07] V.A. Ziparo, A. Kleiner, B. Nebel, and D. Nardi. RFID-Based Explora-
tion for Large Robot Teams. In Proceedings of the IEEE International
Conference on Robotics and Automation, pages 4606–4613, 2007.
[ZLV07] P. Zebrowski, Y. Litus, and R.T. Vaughan. Energy Efficient Robot Ren-
dezvous. In Fourth Canadian Conference on Computer and Robot Vision,
2007.](https://image.slidesharecdn.com/adionisithesis-1296651517931-phpapp01/75/A-Dionisi-Thesis-123-2048.jpg)

La tesi di laurea specialistica di Alessandro Dionisi, sotto la supervisione del Prof. Luca Iocchi, esplora l'uso dei dispositivi Zigbee per l'esplorazione autonoma di robot mobili. Il documento analizza vari aspetti dell'architettura dei robot e delle tecnologie di localizzazione, con particolare attenzione ai moduli e ai metodi utilizzati. La ricerca contribuisce alla comprensione e allo sviluppo di soluzioni innovative per la navigazione robotica in ambienti complessi.
























































![[Thesis] IBSS: Intelligent Brake Support System](https://cdn.slidesharecdn.com/ss_thumbnails/tesi-160804132808-thumbnail.jpg?width=640&height=640&fit=bounds)









