La tesi di Thomas Massari presenta 'anatomimo', un'applicazione interattiva per l'apprendimento dell'anatomia, utilizzando un modello anatomico 3D animato in tempo reale tramite la tecnologia Kinect. Essa affronta le sfide della cattura dei movimenti e della rappresentazione realistica delle strutture anatomiche, proponendo un approccio innovativo che migliora l'interazione e la comprensione della dinamica anatomica. Infine, la demo del progetto sarà presentata in una mostra itinerante in Francia nel 2017.










![1 – Introduzione
1.1 Contestualizzazione
L’anatomia è composta da conoscenze complesse, numerose, strutturate, statiche
e dinamiche. Capire come l’anatomia funziona e comprendere la sua cinematica è
importante per gli studi medici, sportivi ma anche per l’educazione in generale.
Nel corso degli anni, diversi supporti di conoscenza hanno visto la luce con lo
scopo di rappresentare e strutturare l’anatomia: dai disegni su lavagna, ai libri di
anatomia, passando per la tappa fondamentale della dissezione e dei lavori prati-
ci sui modelli plastici in 3D. È peraltro difficile imparare la dimensione dinamica
dell’anatomia attraverso gli strumenti di apprendimento tradizionali, nozione che è
tuttavia essenziale alla formazione dei medici.
Per colmare questa mancanza, l’obiettivo che ci si è proposti è quello di sviluppare
un sistema tempo reale che permetta di visualizzare il corpo in azione, chiamato
«AnatoMimo».
1.1.1 Il progetto AnatoMimo
Attraverso AnatoMimo, un qualsiasi utilizzatore, muovendo il proprio corpo, potrà
osservare attraverso una resa di immagini e tecniche di interazione adeguate il fun-
zionamento dei diversi elementi anatomici messi in gioco all’interno di un’azione di
movimento.
L’idea consiste nell’animare un modello anatomico 3D (pelle, scheletro,
muscoli, organi e sistema vascolare) mimando i movimenti di un utiliz-
zatore. Si parla qui di un’applicazione in tempo reale di tipo «specchio
interattivo».
Supponendo che l’esperienza corporea, nel senso di utilizzare il proprio corpo,
possa aiutare chiunque voglia imparare, specialmente uno studente di medicina, nel
processo di apprendimento, di comprensione e di memorizzazione [1], si propone
d’innovare il campo dei metodi di apprendimento dell’anatomia. Il lavoro svolto è
basato su due ipotesi:
• La visualizzazione spaziale è fondamentale per la comprensione e l’apprendi-
mento di forme 3D articolate complesse [2, 3]. Le tecniche interattive basate
sulla visualizzazione spaziale, possono fortemente facilitare la comprensione,
la memorizzazione e l’apprendimento del contenuto dinamico complesso [4, 5].
• Il «Somatic Learning» fa riferimento all’idea di apprendere attraverso l’eserci-
zio corporeo specificamente elaborato per mettere in collegamento la coscienza
e la sensazione dei movimenti: il nostro sistema motore influenza la nostra
cognizione [6, 7]. Si parla qui di incorporamento o «embodiment».
2](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-13-320.jpg)






![2 – Stato dell’arte
2.2b) o «Il signore degli Anelli». Basato su dati ottenuti da MRI di vere persone, il
sistema permette la visualizzazione di deformazioni dovute alle ossa, ai muscoli, ai
depositi di grasso o anche ai tendini.
Alcuni film utilizzano questo genere di sistema per animare gli animali. In figura
2.2c si può vedere il modello utilizzato per rappresentare la tigre in «La vita di Pi»,
costituito da uno strato superficiale di pelle, da uno scheletro minimalista e da zone
simulate (in verde) che rappresentano i tessuti molli (muscoli, organi, ecc.).
(a) (b) (c)
Figura 2.2: Utilizzo dell’anatomia per il cinema e gli effetti speciali. (a) Shrek -
DreamWorks 2001. (b) Avatar - Weta Digital 2009. (d) La vita di Pi - 2012.
2.2 Storia dei supporti di conoscenza anatomica
Dopo aver rapidamente fatto un trascorso dei settori non direttamente legati alla
medicina ma che si basano comunque su conoscenze anatomiche, si vorrebbe ora fare
uno stato dell’arte dei supporti di conoscenza anatomica esistenti, spiegare il loro
contesto di utilizzo e la loro evoluzione verso gli strumenti che si usano oggigiorno.
Nel seguito di questa sezione, si richiameranno brevemente le nozioni di «visualiz-
zazione». Si vedranno in seguito i diversi tipi di supporto di conoscenza: dall’utilizzo
del corpo, passando per le rappresentazioni iconografiche, gli atlanti anatomici, le
rappresentazioni in volume fino ad arrivare alle rappresentazioni virtuali.
2.2.1 Visualizzazione
Il termine «visualizzazione scientifica» o semplicemente «visualizzazione» si riferisce
all’idea di una rappresentazione grafica organizzata che permette di spiegare grafi-
camente un concetto o dei dati sperimentali in maniera semplice e intuitiva ad un
grande pubblico. Si può prendere come esempio l’utilizzo di grafici per conosce-
re le tendenze dei mercati finanziari o l’utilizzo di mappe mentali [8] per aiutare
nell’apprendimento di nozioni.
9](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-20-320.jpg)

![2 – Stato dell’arte
(a) (b)
Figura 2.3: La dissezione come supporto per l’apprendimento. (a) Lezione di
anatomia del dottor Tulp, Rembrandt - 1632. (b) Anatomage - 2012.
di occupare un posto sempre più importante per l’apprendimento dell’anatomia tra
gli studenti.
Si può citare per esempio la tavola di dissezione virtuale Anatomage [9] (vedere
figura 2.3b): un tavolo a misura d’uomo che permette di interagire con un modello
anatomico 3D corredato da annotazioni. Utilizzando uno scalpello virtuale e dei
piani di taglio, questo tavolo permette d’isolare le strutture anatomiche e di navi-
gare tra gli strati anatomici più o meno profondi. Il modello utilizzato può essere
cambiato in funzione dei bisogni pedagogici (ad es.: modello femminile, maschile,
patologico, ecc.). Il mondo virtuale permette l’utilizzo di un modello all’infinito e
permette di poter essere confrontato con vari casi alcuni anche molto rari.
Conservazione del corpo
Con lo scopo di fissare e conservare il corpo per preservarlo per le generazioni future,
sono state inventate delle tecniche come la fissazione in formalina o la plastinazione.
Si trovano ancora in alcune esposizioni di anatomia dei corpi o parti di corpi
umani (come gli organi) conservati nella formalina. Questa tecnica consiste nell’im-
mergere il materiale anatomico in un grande volume di liquido di fissazione. La
durata della fissazione varia in funzione della grandezza del campione e sfortunata-
mente i colori del materiale anatomico si sbiadiscono man mano che il tempo passa.
La tecnica di plastinazione è stata introdotta da Gunther von Hagens nel 1977,
anatomista tedesco ed autore delle mostre intitolate “Body Worlds” (vedere figura
2.4a. Questa tecnica mira a conservare i tessuti biologici sostituendo i diversi liquidi
organici con del silicone. Al contrario della conservazione in formalina, la plastina-
zione fissa in modo solido le strutture anatomiche, il che impedisce di poter eseguire
11](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-22-320.jpg)


![2 – Stato dell’arte
2.2.4 Atlanti anatomici
Il termine atlante anatomico fa riferimento, in primo luogo, alle opere che presentano
degli strati successivi del corpo o di una struttura anatomica specifica complessa,
per aiutare a comprenderne la forma ed a posizionarla rispetto al resto del corpo
o ad altre strutture anatomiche. Spesso le pagine sono intercalate da lucidi in cui
sono presenti delle annotazioni per aiutare ad identificare le strutture.
Si trovano ugualmente degli atlanti statistici di un segmento del corpo o di un or-
gano in particolare che descrivono le differenze trovate tra i vari corpi e la percentuale
di apparizione di queste differenze.
Nel corso degli anni sono stati sviluppati degli atlanti anatomici di assoluto rife-
rimento, come per esempio i libri di anatomia clinica di Pierre Kamina [10]. Questi
atlanti, come le illustrazioni, per natura essendo stampati, mancano di interattività.
Atlanti anatomici interattivi: web semantico
Grazie all’acquisizione di popolarità del web semantico - standardizzazione dei pro-
tocolli di condivisione, di lettura e di scambio d’informazioni strutturate - e allo
sviluppo della tecnologia WebGL, che permette la visualizzazione in tempo reale
di un modello anatomico 3D nella maggior parte dei browser, sempre più atlanti
anatomici interattivi sono disponibili in rete.
(a) (b)
Figura 2.7: Atlanti anatomici interattivi. (a) BioDigitalHuman - 2016. (b)
ZygoteBody - 2014.
Si presentano in figura 2.7 un insieme di atlanti anatomici interattivi che per-
mettono di navigare negli strati anatomici in modo semplice e ergonomico. Spesso,
una barra di ricerca è proposta per aiutare l’utilizzatore nella navigazione grazie alla
14](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-25-320.jpg)
![2 – Stato dell’arte
creazione di un lessico anatomico. Il RDF5
è il formato di base utilizzato per creare
e organizzare i lessici anatomici.
Nel 1999, nasce uno dei primi atlanti interattivi con il nome di InnerBODY
[11], basato su una rappresentazione 2D del corpo sul piano frontale. È possibile
navigare all’interno del modello scegliendo di visualizzare uno specifico sistema (ad
es.: sistema circolatorio, sistema muscolare, sistema scheletrico, ecc.) o selezionando
un segmento anatomico (ad es.: tronco, bacino, arti inferiori, ecc.) o ancora un’entità
anatomica (ad es.: cuore, vena cava, ecc.). Una rappresentazione 3D del corpo
completo è stata poi aggiunta per permettere all’utilizzatore di girare intorno al
modello anatomico nello spazio.
La figura 2.7a rappresenta un progetto di atlante anatomico, basato su una
rappresentazione 3D del corpo intero, che funziona sfruttando la tecnologia Bio-
DigitalHuman [12], da cui deriva il suo nome. Rispetto agli altri atlanti classici,
quest’ultimo permette di poter selezionare delle strutture di interesse corredate da
annotazioni e supporti per domande di apprendimento. È ugualmente possibile
visualizzare dei video e delle simulazioni preregistrate mettendo in risalto dei com-
portamenti fisiologici (ad es: il battito cardiaco) o delle azioni chirurgiche (ad es:
chirurgia del labbro e del palato).
Il ZygoteBody [13], presentato in figura figura 2.7b, propone lo stesso tipo di
servizi che il BioDigitalHuman.
Si noti che, anatomicamente parlando, tutti gli atlanti sono un po’ sbagliati:
sono incompleti e presentano degli errori difficili da trovare per i non esperti.
2.2.5 Rappresentazioni in volumi
Ceroplastica: le statue di cera anatomiche
Le statue di cera anatomiche dell’intero corpo o di un segmento specifico, apparse
nel XVIII secolo, sono una forma di documentazione in volume che permette di
presentare in maniera realistica i risultati delle dissezioni.
Gaetano Giulio Zumbo (1656-1701) fu il primo modellista a utilizzare la cera per
creare dei modelli anatomici (vedere figura 2.8a). Uno studio fu creato a Firenze
nell’edificio del museo La specola [14] con l’idea di creare numerose opere e inviarle
nei grandi centri anatomici europei.
La creazione di tali modelli era lunga, costosa e per un’elevata precisione e qualità
di un solo modello potevano essere necessarie la realizzazione di centinaia di cadaveri
come riferimento. La cera colorata, nonostante la sensibilità ai cambiamenti di
temperatura, permette di conservare a lungo termine delle informazioni molto precise
ma non permette un’esplorazione interattiva come la dissezione.
5
RDF: Resource Description Framework
15](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-26-320.jpg)
![2 – Stato dell’arte
(a) (b)
Figura 2.8: Le statue di cera come supporto per l’apprendimento. (a) Dettaglio di
una statua di cera di Gaetano Zumbo. (b) Venere anatomica di Clemente Susini.
Clemente Susini (1754-1814) ha contribuito in questo settore creando dei modelli
nella categoria «Veneri anatomiche» (vedere figura 2.8b): statue di cera di donne,
a grandezza naturale, le cui costruzioni erano spesso basate sulle illustrazioni come
quelle di Vesalio. Per aumentare il realismo, spesso erano utilizzati dei veri capelli
e degli occhi di vetro. Queste statue di cera sono state create con lo scopo di
demistificare la dissezione tra il grande pubblico.
Stampa 3D
Ai giorni nostri i manichini anatomici sono pro-
Figura 2.9: Manichino
anatomico industriale.
dotti essenzialmente in plastica e se ne possono tro-
vare di industriali, di cui un esempio può essere tro-
vato in figura 2.9, o di modelli in serie limitata.
La comparsa della stampa 3D ha permesso la per-
sonalizzazione dei modelli su un dato individuo per
aiutare la pianificazione e l’allenamento preoperato-
rio. Per esempio, vengono fatte delle stampe 3D
con la tecnologia ColorJet printing (CJP) [15]: a
partire da dati MRI un modello 3D unico nel suo
genere viene stampato. Questi modelli sono sta-
ti presentati durante i CES 2016 da 3D Systems
[16].
16](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-27-320.jpg)

![2 – Stato dell’arte
• Ecografia, una delle uniche tecniche di imaging biomedico in tempo reale,
sfrutta gli ultrasuoni. È spesso usata per osservare i battiti del cuore o durante
la gravidanza per verificare il buono stato di salute del feto. In funzione
della frequenza, l’immagine può essere più o meno precisa, e presentare delle
strutture più o meno profonde.
(a) (b) (c) (d)
Figura 2.10: Diversi tipi di immagini mediche. (a) MRI. (b) TC. (c) PET. (d)
Ecografia.
Strumenti per l’imaging medico
Come si è appena detto, esistono una moltitudine di tipi di immagini cliniche, cia-
scun tipo avente un formato diverso dalle altre. Non è quindi inusuale, per uno
stesso paziente, utilizzare diversi protocolli di imaging medico. Maintz e colleghi
[17] propongono un riassunto dei diversi metodi che permettono di allineare tra di
loro immagini mediche di diversi formati, o anche metodi per allineare immagini
mediche pre-operatorie e post-operatorie.
Con lo scopo di rendere migliore la visualizzazione e la comprensione dei dati,
molti approcci propongono di generare delle immagini volumetriche a partire da
immagini mediche.
Utilizzo delle immagini mediche
Ai giorni nostri, la resa e la visualizzazione volumetrica di immagini mediche, sono
diventate indispensabili per aiutare i clinici nella loro diagnosi e studi preoperatori.
Queste rappresentazioni volumetriche permettono anche ai clinici di conoscere lo
stato di un paziente senza dover far ricorso ad un’operazione.
Tra le applicazioni dell’imaging medico, la diagnosi per pianificazione e la guida
di un gesto chirurgico sono tra le più importanti. Anche la simulazione medica-
le è ugualmente fondamentale per l’apprendimento del comportamento dei tessuti.
Si tratta di simulare in maniera molto realistica il funzionamento o il comporta-
mento di una parte del corpo umano. L’efficacia della simulazione come supporto di
apprendimento è stata validata nel settore medico attraverso numerosi studi [18, 19].
18](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-29-320.jpg)
![2 – Stato dell’arte
La simulazione medicale può ugualmente aiutare l’apprendimento dei gesti da
eseguire durante l’operazione chirurgica senza introdurre rischi per un paziente. Le
simulazioni spesso in tempo reale, possono essere molto diversificate: simulazione di
vasi sanguigni, di fegato [20], etc.
2.2.7 Conclusione
L’apprendimento dell’anatomia implica la comprensione di strutture anatomiche, il
loro funzionamento fisiologico e il loro movimento. Queste conoscenze sono indi-
spensabili a diversi gradi di complessità e precisione per l’educazione generale, per
gli studi sportivi e gli studi i medicina.
Come visto precedentemente, i supporti di conoscenze anatomiche che permet-
tono la condivione e la diffusione del sapere, sono molto numerosi: dall’utilizzo del
corpo all’imaging medicale, passando per le rappresentazioni iconografiche, gli atlan-
ti anatomici e le rappresentazioni in volume. Si è anche parlato ugualmente dei loro
sviluppi attuali.
Si può osservare in tutti i supporti alcune funzioni fondamentali:
• contesto: le strutture studiate sono sempre poste nel loro contesto anatomico
per una migliore cartografia della conoscenza.
• espressione del vivente: le strutture studiate sono sempre illustrate, non come
delle strutture fisiche inerti ma come delle strutture vive, con lo scopo di
esprimerne il funzionamento e la dinamica.
• approccio artistico: le strutture studiate sono corredate da annotazioni o
colorate in modo per meglio visualizzarle e cosi assimilarle meglio.
Una difficoltà importante che continua a permanere viene dal fatto che risulta
difficile illustrare e spiegare l’anatomia in movimento, conoscenza essenziale alla
formazione dei medici, a partire da mezzi statici [21].
Con l’avanzare della tecnologia è diventato comune l’uso di smartphone, tablet
e computer. Un grande sforzo è stato fatto per trovare dei metodi innovativi che
permettano di creare, visualizzare e animare un contenuto di alta qualità per aiutare
l’apprendimento. Questi metodi innovativi sfruttano la personalizzazione del con-
tenuto, l’interazione, il movimento del contenuto e l’apprendimento intuitivo. Nel-
la sezione seguente si presenteranno i progressi tecnologici raggiunti per facilitare
l’apprendimento delle nozioni anatomiche e medicali.
19](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-30-320.jpg)
![2 – Stato dell’arte
2.3 Le nuove tecnologie al servizio del settore me-
dico
La capacità dei chirurghi a creare un modello mentale che mescola le immagini del
singolo paziente con le conoscenze anatomiche generali, fa parte del loro saper fare.
Per aiutare i medici nella fase di apprendimento e nello studio di casi complessi, sono
stati proposti nuovi approcci basati su nuove tecnologie che permettono, per esem-
pio, una comprensione dell’anatomia prendendo in conto fenomeni dinamici legati
alla produzione di un movimento. Le nuove tecnologie sono basate essenzialmente
sui progressi in trattamento di immagini, informatica grafica, visione artificiale e
sviluppo di nuovi sensori.
2.3.1 Realtà aumentata
Il termine «realtà aumentata» ingloba tutte le interfacce in cui è presente una so-
vrapposizione di dati virtuali su degli oggetti reali. Queste interfacce combinano
metodi di interazione, di visualizzazione e permettono di inserire delle informazioni
in un contesto esterno, utilizzando spesso una scala realistica, per esempio inserendo
una struttura anatomica sopra il corpo dell’utilizzatore.
Grazie all’avvento della realtà aumentata, un buon numero di applicazioni hanno
visto la luce nel settore medico, anche nella visualizzazione e l’apprendimento di
conoscenze anatomiche: ci interesseremo solo di queste ultime.
Le applicazioni in realtà aumentata nel dominio medico possono essere suddivise
in due categorie: le applicazioni pedagogiche (imparare grazie all’interazione) [22] e
le applicazioni di aiuto alle procedure mediche [23]. Esistono diversi tipi di interfacce
per le applicazioni in realtà aumentata: occhiali per realtà aumentata, proiezione su-
gli oggetti, sensori di profondità con schermo, ecc. In figura 2.11 vengono presentate
alcune interfacce di realtà aumentata.
Gli occhiali «HoloLens» (vedere figura 2.11a), commercializzati da Microsoft,
permettono la visualizzazione del contenuto anatomico e potranno diventare in fu-
turo supporto per le lezioni in classe. Gli occhiali permettono di girare intorno ad
un oggetto virtuale e interagire con quest’ultimo. Con lo scopo di presentare il
potenziale di questa tecnologia, Microsoft ha sviluppato un’applicazione chiamata
«HoloAnatomy» [24].
Il Virtual-Tee (vedere figura 2.11b) e i sistemi di libri aumentati (vedere figura
2.11c) sono basati su una tecnologia di riconoscimento di forme. Con l’aiuto di
un’applicazione su un device portabile (smartphone o tablet), l’utilizzatore può avere
accesso ad un contenuto virtuale specifico posizionato nell’ambiente reale.
20](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-31-320.jpg)
![2 – Stato dell’arte
(a) (b) (c)
Figura 2.11: Realtà aumentata al servizio del settore medico. (a) HoloAnatomy
che utilizza le HoloLens. (b) Virtual-Tee. (c) Libro aumentato 4D.
Nella sezione seguente si presenterà in maniera più precisa i sistemi che utilizzano
dei sensori di profondità per seguire l’utilizzatore, interfaccia che si vuole mettere in
atto nell’AnatoMimo.
2.3.2 Lo specchio interattivo
Si chiama «specchio interattivo» uno schermo davanti al quale l’utilizzatore potrà
vedere e interagire con del contenuto virtuale anatomico spesso sovrapposto sulla sua
propria immagine. I criteri di qualità per questo tipo di sistema sono l’interattività
e l’integrazione dei dati.
L’interattività viene definita grazie ad un’applicazione tempo reale e grazie al
monitoraggio (più o meno complesso) dell’utilizzatore: i dati sono spesso legati
ad una zona specifica dell’utilizzatore. L’integrazione si definisce attraverso il ri-
dimensionamento dei dati ad una scala adatta e attraverso l’inserimento di questi
nell’immagine dell’utilizzatore.
Gli specchi interattivi sono spesso utilizzati in diversi settori (moda, trucco)
ma nel caso di applicazioni anatomiche lo specchio rileva i diversi strati anatomici
interni ad un utilizzatore e gli fornisce l’impressione di potere vedere all’interno del
suo proprio corpo. Si presenta nel seguito, un insieme di specchi interattivi che sono
apparsi in questi ultimi anni.
Magic Mirror
Dopo diversi anni di ricerca nello sviluppo di strumenti in realtà aumentata per la
chirurgia mini-invasiva, il team Mirracle [25], sotto la direzione del professor Nassir
Navab, ha cominciato nel 2011 un progetto di specchio magico per visualizzare
e interagire con dei dati anatomici. Il «Magic Mirror» [26, 27, 28] è un sistema
interattivo che permette la visualizzazione delle conoscenze anatomiche in tempo
21](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-32-320.jpg)
![2 – Stato dell’arte
Figura 2.12: Magic Mirror sviluppato dal gruppo Mirracle (2011-2014)
reale e basato sul riconoscimento dei movimenti del braccio per navigare tra i vari
strati anatomici. Una Kinect PrimeSense è stata utilizzata, insieme alle librerie
OpenNi e NITE, per stimare la postura dell’utilizzatore.
La figura 2.12 fornisce un esempio di feedback visivo che si può ottenere con
questo sistema. Può essere presentato su uno semplice schermo o anche su un
muro di schermi, in funzione dei bisogni della dimostrazione. Per avere in qualsiasi
momento un effetto di sovrapposizione dell’anatomia sull’utilizzatore, un sistema di
posizionamento dei dati viene applicato. Per gestire l’integrazione dei dati anatomici
sull’immagine dell’utilizzatore, i dati vengono cerchiati in giallo.
Digital Mirror
Figura 2.13: Digital Mirror - Museo delle Arti e dei Mestieri a Parigi - 2014
L’allestimento 3D intitolato «Digital Mirror» [29] presentato al Musée des arts et
métiers di Parigi da Maître e collaboratori è stato creato con lo scopo di visualizzare
in tempo reale l’interno del proprio corpo: scheletro e organi.
La visualizzazione si fa con l’aiuto di un’immagine composita del corpo interno
creata a partire da diverse immagini mediche: PET, raggi X e MRI. Un modello
femminile e un modello maschile sono creati e si alternano grazie ad un algoritmo
di determinazione del sesso dell’utilizzatore.
22](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-33-320.jpg)
![2 – Stato dell’arte
La figura 2.13 fornisce un esempio di questa dimostrazione. Il feedback visivo si
effettua su un insieme di otto schermi di circa 1.65m di altezza ciascuno. L’utiliz-
zo di un sensore Microsoft Kinect permette di catturare i movimenti dei segmenti
anatomici e quindi deformare rigidamente l’immagine, in sincronia con il corpo del-
l’utilizzatore per ottenere una visualizzazione simile in termini di postura. Questo
lavoro è stato presentato a Toronto a CHI6
2014.
Anatomie Spiegel
Figura 2.14: Anatomie Spiegel - http://anatomiespiegel.de - 2015
Presentato al congresso annuale della GMA7
nel 2015 a Leipzig, il progetto «Ana-
tomie Spiegel» [30] è stato sviluppato da due studenti, Simon Kirsch e Alexander
Borner, supervisionati dal professor Bernd Hanisch.
Il sitema «Anatomie Spiegel» permette la visualizzazione di un modello anatomi-
co virtuale corpo completo (sistema muscolare, organi, sistema scheletrico, sistema
circolatorio). La geometria è modellizzata attraverso l’uso dello strumento di scul-
tura 3D ZBrush [31]. Per validare la modellizzazione, gli studenti hanno utilizzato le
opere dell’Istituto d’anatomia dell’Università Martin Luther ad Halle. Un modello
per ogni sesso è stato presentato e può essere modificato in funzione della scelta
dell’utilizzatore. Inoltre i modelli sono corredati da annotazioni.
La figura 2.14 mostra un esempio di questa dimostrazione. Il feedback visivo
tempo reale viene effettuato su uno schermo le cui dimensioni possono evolvere in
funzione delle necessità. L’utilizzo di uno scheletro di animazione dato dal sensore
Microsoft Kinect V2.0 permette l’animazione e l’impostazione della postura dell’uti-
lizzatore. La profondità (spostamento dell’utilizzatore lungo l’asse sagittale) è anche
6
CHI: Computer-Human Interaction conference
7
GMA: società tedesca di formazione medica
23](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-34-320.jpg)












![3 – Anatomia: conoscenze anatomiche e modelli 3D
Strato superficiale di pelle
Esistono diversi metodi per ottenere una superficie esterna di pelle: creazione di
mesh alla mano o per generazione automatica. Per la creazione alla mano, dei sof-
ware di modellizzazione 3D (tra i quali Blender [32]) o di scultura (tra i quali ZBrush
[31]) sono utilizzati. Per la generazione automatica si tratta spesso di scannerizzare
una persona e ricostruire la sua pelle a partire da i dati recuperati (pelle parziale,
nuvola di punti, ecc.)
Esistono diversi sistemi, più o meno pesanti, per scannerizzare la pelle di un
utilizzatore. Ciascun tipo di sistema di acquisizione fornisce dei risultati più o meno
realistici, spesso in funzione del numero e della qualità dei sensori di acquisizione.
(a) (b)
Figura 3.8: Scanner di un utilizzatore: pelle user-specific. (a) Light Stage 6 [33].
(b) Scanner a partire di un sensore leggero.
In figura 3.8a viene presentato il sistema Light Stage 6 [33], composto da teleca-
mere ad alta risoluzione e un insieme di sorgenti luminose che permettono la cattura
di un utilizzatore (corpo intero o semplicemente solo il viso) sotto diverse condizioni
di illuminamento. Questo permette di creare un campo d’illuminamento della pelle
che renderà possibile ottenere una texture3
della pelle fotorealistica [34].
La figura 3.8b presenta una soluzione per scannerizzare il corpo di un utilizzatore
attraverso l’uso di un sensore di profondità. Quattro nuvole di punti parziali (posi-
zioni 3D e colori) sono catturati e poi assemblati per generare una mesh texturata
del corpo intero dell’utilizzatore.
Per ottenere delle mesh più generiche, sono nati degli approcci con delle basi
di dati. Questi permettono, a partire da un gran numero di mesh, di generare dei
modelli statistici, basati su delle misure antropomorfiche indotte.
3
Texture: un’immagine bidimensionale che viene riprodotta su una o più facce di un modello
poligonale tridimensionale
36](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-47-320.jpg)
![3 – Anatomia: conoscenze anatomiche e modelli 3D
Nasce nel 2005 SCAPE [35], una delle prime basi di dati ma anche la più utilizzata
(vedere figura 3.9a). Raggruppa due set di dati: il primo è composto da 37 mesh di
persone diverse in posizioni simili; il secondo è composto da 70 mesh di una stessa
persona in diverse posizioni. La cattura della mesh si esegue grazie a 50-60 marker
e uno scanner Cyberware WBX corpo intero che cattura simultaneamente quattro
nuvole di punti parziali.
La base di dati Dyna [36] è un’estensione di SCAPE e permette la deformazione
del corpo intero basandosi non più su delle posizioni statiche ma su dei dati dinamici,
prendendo in considerazione la deformazione dei tessuti molli sottostanti alla pelle.
Si può anche citare la base di dati FAUST [37], composta da 300 mesh di 10
persone in posizioni molto diverse (vedere figura 3.9b). Un approccio multi camera
è stato utilizzato per catturare la geometria.
(a) (b)
Figura 3.9: Database di dati composti da un insieme di mesh della superficie della
pelle. (a) Database SCAPE [35]. (b) Database FAUST
Anatomia interna
Esistono diversi modi per ottenere un modello di riferimento dell’anatomia inter-
na: utilizzando direttamente il corpo (con preparati istologici), utilizzando delle
immagini mediche o utilizzando delle opere anatomiche (illustrazioni, foto).
Si chiama preparato istologico una porzione di tessuto animale o vegetale adatta
ad essere analizzata tramite microscopio ottico o elettronico. Dopo il taglio, le strisce
sottilissime vengono colorate e fissate con della resina o della formalina per evitare la
decomposizione. Si può citare la costruzione e la messa in opera di «Visible Human
Project» [38] negli Stati Uniti, il progetto di atlante radiologico «VOXEL MAN 3D
Navigator» [39] e il progetto coreano «Visible Korean Human».
Alcuni metodi sfruttano le immagini mediche per ricostruire dei corpi completi
o dei sistemi specifici [40]. Si tratta spesso, in un primo momento, di segmentare le
immagini mediche per separare le strutture anatomiche le une dalle altre e quindi
ottenere il contorno delle strutture. Questo settore è molto vasto in termini di
metodi ma il fatto di segmentare automaticamente immagini mediche risulta ancora
molto difficile.
37](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-48-320.jpg)
![3 – Anatomia: conoscenze anatomiche e modelli 3D
Sim4Life [41] è un insieme di strumenti per la simulazione. Utilizza come modelli
di riferimento la popolazione virtuale VIP 3.0 [42], composta da modelli di ogni tipo
(donne e uomini medi, bambini, obesi, ecc.) Questi modelli di riferimento sono stati
costruiti a partire da immagini mediche.
La soluzione che utilizza opere anatomiche consiste nel modellizzare alla mano
l’insieme della geometria attraverso software di modellizzazione 3D come Blender
[32] o di scultura 3D come ZBrush [31].
Per esempio si può prendere come esempio lo Zygote [43], modello di riferimento
completo che propone un modello femminile e maschile (vedere figura 3.10a). Il
modello Adrienne [44], proposto dall’azienda Ziva Dynamics per la realizzazione
di animazioni foto-realistiche nel settore del cinema (vedere figura 3.10b), contiene
tutte le strutture anatomiche necessarie per definire la forma e il movimento del
personaggio: sistema scheletrico, muscolare, pelle, tessuti connettivi. Per creare la
geometria dell’anatomia interna gli autori si basano su dei dati MRI come standard
di riferimento. Per quanto riguarda la superficie della pelle e della sua texture,
utilizzano un sistema di cattura. Un sistema di allineamento è utilizzato per far
combaciare l’anatomia interna con la struttura della pelle esterna.
(a) (b)
Figura 3.10: Modellizzazione di modelli anatomici alla mano. (a) Modello Zygote
[43]. (b) Modello Adrienne [44].
3.2.2 Tipi di dati e livello di dettaglio
Nella sezione 2.2, si è discusso dei diversi tipi di supporto per le conoscenze anatomi-
che. Si è potuto vedere che i tipi di dati presentati sono dipendenti dalle conoscenze
che si vuole comunicare.
38](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-49-320.jpg)
![3 – Anatomia: conoscenze anatomiche e modelli 3D
esempio, si utilizzerà una rappresentazione schematica per spiegare un mecca-
nismo, si darà risalto ad alcuni oggetti colorandoli in maniera non realistica
per rappresentare una nozione pedagogiche e si utilizzerà un oggetto texturato
con una gestione delle ombre per rendere l’oggetto foto-realistico.
(a) (b) (c)
Figura 3.11: Diversi criteri di astrazione per il sistema scheletrico. (a) Vi-
sualizzazione dei volumi, attraverso il mooc FOVEA [45]. (b) Il modello di
riferimento utilizzato. (c) Schema descrittivo dei tessuti connettivi del bacino
(http://www.corpshumain.ca).
Ogni rappresentazione è adattata alla visualizzazione o all’apprendimento di no-
zioni diverse. La rappresentazione scelta è quindi funzione delle informazioni che si
vuole trasmettere. Si può vedere questo concetto messo in atto in figura 3.11 che rap-
presenta diversi livelli di astrazione per il sistema scheletrico. La rappresentazione
schematica proposta in figura 3.11a da [45, 46] permette una visualizzazione globale
delle forme e delle loro orientazioni, e quindi offre una migliore comprensione dei
volumi. La visualizzazione realistica semplificata proposta in figura 3.11b è quella
che si è scelto di adottare poiché mostra sufficientemente dettagli per capire punte
e buchi delle mesh. Nel frattempo rimane sufficientemente semplice per essere facil-
mente manipolabile sempre rimanendo sufficientemente precisa per lo studio delle
forme delle strutture anatomiche e della loro morfologia. La figura 3.11c propone
una resa foto-realistica dove si può osservare il lato rugoso dell’osso dovuto alle sue
asperità.
Ci si concentra ora sui diversi livelli di astrazione possibili per il sistema muscola-
re (vedere figura 3.12). La rappresentazione dei muscoli attraverso le linee di azione
(muscoli 1D) (presentato in figura 3.12a) permette una visualizzazione dei muscoli
superficiali e dei muscoli profondi insieme alle loro posizioni di inserzione sullo sche-
letro. I muscoli semplificati proposti da Maya Muscle [47, 48] (vedere figura 3.12b),
che permettono la visualizzazione dei volumi muscolari, sono utilizzati per ricreare le
deformazioni muscolari e applicarle alla superficie della pelle. Le figure 3.12c e 3.12d
40](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-51-320.jpg)
![3 – Anatomia: conoscenze anatomiche e modelli 3D
forniscono una visualizzazione un po’ più realistica sottolineando le fibre muscolari
o ancora permettendo la visualizzazione delle diverse parti del muscolo. Si è scelto
come per il sistema scheletrico di presentare i muscoli nella loro forma più realista
ma lasciando una topologia semplice (geometria liscia) per guadagnare velocità nel
ritorno visivo.
(a) (b) (c) (d)
Figura 3.12: Diversi criteri di astrazione per il sistema muscolare. (a) Rappre-
sentazione dei muscoli attraverso le linee di azione. (b) Muscoli Maya, dell’artista
Jonathan Chien su Behance. (c) Modello di riferimento utilizzato. (d) Modello
Zygote a cui sono assegnate delle texture.
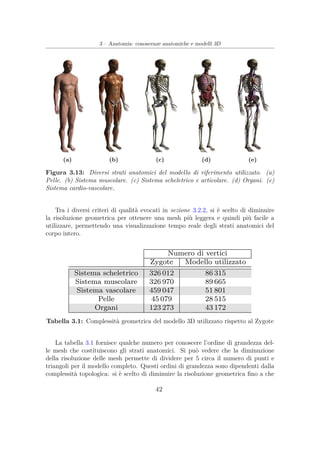
3.2.3 Il modello anatomico di riferimento utilizzato
Ottenere un modello anatomico completo di riferimento è un compito difficile. Si è
parlato nella sezione 3.2.1 di un insieme di modelli esistenti. Per il modello utilizza-
to in questo progetto, si è scelto l’utilizzo di Zygote [43], un modello di riferimento
completo modellizzato da degli artisti. È composto da un modello di sesso maschile
e da uno di sesso femminile. Dal punto di vista anatomico, esiste un insieme di
differenze tra l’uomo e la donna, soprattutto differenze a livello delle strutture ana-
tomiche, che influenzano le proporzioni globali delle parti del corpo. Per semplificare
il lavoro, è stato scelto di fare un’astrazione da queste diversità tra i due modelli,
andando a lavorare su un modello anatomico unisex. Il modello anatomico utiliz-
zato è costituito da un sistema muscolo-scheletrico, da diversi organi, dal sistema
cardiovascolare e dalla pelle (vedere 3.13).
41](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-52-320.jpg)


![4 – Cattura e resa del movimento
(a) (b) (c) (d)
Figura 4.1: Diverse strutture di controllo del movimento. (a) Scheletro di ani-
mazione [49]. (b) Curve di deformazione. (c) Linee d’azione. (d) Gabbia di
controllo.
migliore visualizzazione della gerarchia, i legami tra i sistemi di riferimento
sono spesso rappresentati in maniera schematica con dei bastoncini. Si noti
che la complessità della struttura, come la quantità dei sotto-oggetti necessari,
è dipendente della precisione dei movimenti che si vuole poter ottenere. Per
esempio, la figura 4.1a rappresenta una struttura articolare che non permette
il piegamento delle dita. La struttura si utilizza andando ad applicare delle
rotazioni a livello dei sistemi di riferimento articolari e viene spesso definita
manualmente, riferimento dopo riferimento.
• la curva di controllo, o curva di deformazione, è una struttura che si sta sem-
pre più sviluppando. Si tratta di definire una curva in 3D (composta da un
insieme di maniglie di deformazioni). Il numero di maniglie è dipendente dal-
la precisione voluta nella deformazione. La figura 4.1b presenta questa curva
permettendo di deformare la schiena e la testa di un personaggio. La ridefini-
zione di questa curva e la preservazione di volume fanno in modo di indurre il
movimento.
La figura 4.1c raffigura un altro tipo di curva di controllo che viene chiamata
linea d’azione e rappresenta la linea che percorre il personaggio e definisce la
sua dinamica.
• la gabbia di controllo, o griglia di deformazione, è utilizzata per dare degli
effetti elastici ai personaggi applicando deformazioni volumetriche. Come mo-
strato in figura 4.1d, viene presentata sotto forma di una struttura topologica
semplice e deformabile. Più la struttura è complessa e più permetterà de-
formazioni dettagliate. Per controllare la struttura, basterà all’utilizzatore di
tirare su uno o più vertici di questa.
46](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-57-320.jpg)
![4 – Cattura e resa del movimento
4.1.2 Skinning
Con il termine skinning si definisce il metodo impiegato per associare le strutture
di controllo e le sottoparti di un oggetto insieme. L’idea è quella di definire come
le modifiche applicate alla struttura di controllo si ripercuoteranno sulla geometria
dell’oggetto. I primi metodi di skinning geometrico in tempo reale che sono stati
sviluppati sono dei metodi molto semplici, come il metodo molto conosciuto del «Li-
near Blend Skinning» (LBS) [50, 51] che associa a ciascuna sottoparte di un oggetto
da uno a quattro elementi della struttura di controllo in modo da poter anima-
re l’oggetto (vedere figura 4.2b). Tuttavia questa tecnica comporta degli artefatti
ben conosciuti come l’effetto carta di caramella (riduzione della mesh in un punto
quando la mesh si torce) e il crollo del gomito (perdita di volume a livello di una
articolazione).
L’approccio sviluppato da Kavan e colleghi [52], il «Dual Quaternion Skinning»
(DQS), permette grazie alla sua non linearità di evitare alcuni artefatti del LBS
(vedere figura 4.2c). In più questo approccio è facile da implementare ed è facile
passare da LBS a DQS.
I metodi di skinning pseudo-fisico si basano su delle proprietà fisiche della pelle
umana (materiale elastico) per ottenere delle deformazioni più realistiche. Questi
metodi danno dei risultati molto soddisfacenti ma impiegano spesso molto più tempo
di calcolo.
(a) (b) (c)
Figura 4.2: Diversi metodi di skinning geometrico. (a) Definizione di pesi dello
skinning rispetto alla struttura di controllo. (b) Metodo del linear blend skinning
(LBS). (c) Metodo del dual quaternion skinning (DQS).
Definizione dei pesi dello skinning
Si chiamano pesi dello skinning la ponderazione che definisce per ciascun punto
di una mesh, gli elementi della struttura di controllo che andranno a controllarlo
e in che misura (vedere figura 4.2a). Un punto può essere influenzato da uno o
47](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-58-320.jpg)
![4 – Cattura e resa del movimento
Si chiama cattura del movimento1
una tecnica che permette di registrare le posi-
zioni e le rotazioni dei segmenti di un soggetto (ad es.: oggetto, animale, umano) nel
corso del tempo, per in seguito ritrascrivere questi movimenti in uno spazio virtuale.
Si differenzia generalmente la cattura dei movimenti del corpo intero dalla cattura
delle espressioni facciali. Ci si interessa qui unicamente della cattura dei movimenti
del corpo intero. Si distinguono due grandi tipi di sistema di cattura: i sistemi
pesanti con conseguenti marker che sono cari ma che offrono dati precisi e realistici
e i sistemi leggeri, senza marker.
Sistemi pesanti
Si qualificano come «sistemi pesanti», i sistemi di cattura che necessitano di molti
strumenti, spesso installati in modo permanente in una stanza. Questi sistemi per-
mettono di registrare dei movimenti in maniera molto precisa e dettagliata. Lo stesso
tipo di sistema, chiamato «performance capture», è utilizzato anche per catturare
le espressioni facciali degli attori (come in figura 4.3a).
(a) (b)
Figura 4.3: Cattura dei movimenti, sistemi pesanti. (a) Sistema di cattura del viso
- L’alba del pianeta delle scimmie. (b) Nestera e colleghi [53]
Questa tecnologia è occasionalmente utilizzata per degli studi biomedici, come
lo studio del movimento del piede durante un ciclo di cammino (vedere figura 4.3b),
realizzato da Nestera e colleghi [53].
Sistemi leggeri
D’altro canto, un prezzo abbordabile e la loro semplicità di installazione e di uti-
lizzo, hanno fatto crescere l’interesse dei sistemi di cattura senza marker nei settori
1
Cattura del movimento: motion capture o semplicemente mocap in inglese
49](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-60-320.jpg)
![4 – Cattura e resa del movimento
dei videogiochi, del cinema ma anche nella comunità biomedica. L’imporsi delle
telecamere RGB-D come la Kinect ha permesso lo sviluppo di nuovi strumenti nel
settore medico e sanitario.
Gli autori di [55] dichiarano che i dati ricavati dalla registrazione dei movimenti
grazie ad una Kinect, possono essere sufficienti per lo studio dei movimenti basici,
come l’ampiezza del passo durante il cammino ma sono molto lontani dai risultati
raggiunti con sensori di cattura pesanti.
4.2.1 Metodi di cattura dei movimenti
Il fatto che si voglia utilizzare delle tecnologie semplici e trasportabili, ci impone l’u-
tilizzo di sensori relativamente leggeri per catturare l’utilizzatore. La scelta quindi è
stata portata verso le telecamere RGB-D che forniscono informazioni di profondità,
che permettono di catturare semplicemente i movimenti di uno o più utilizzatori.
Attraverso lo studio delle applicazioni di allenamento sportivo e di fitness che uti-
lizzano telecamere RGB-D, si è determinato che il sensore Microsoft Kinect V2.0 è
quello che fornisce i migliori risultati in termini di cattura dei movimenti.
In sezione 2.3.2 si sono presentati diversi specchi interattivi e ora verranno mo-
strati quali sono i metodi utilizzati da ciascun progetto per indurre il movimento al
loro modello anatomico di riferimento. Nel quadro del «Magic Mirror», la cattura
di uno scheletro di animazione viene fatta attraverso l’aiuto di una libreria NITE.
Per migliorare il riposizionamento dei dati anatomici 3D, in una fase di inizializ-
zazione è chiesto agli utilizzatori di puntare sul loro proprio corpo cinque punti
anatomici specifici [54]. Il sistema andrà quindi a definire i vettori di traslazione
che dovrà applicare sulle articolazioni per applicare queste correzioni e quindi ot-
tenere un miglior posizionamento dell’anatomia. Nel progetto «Digital Mirror», si
tratta essenzialmente di un riposizionamento nello spazio del modello anatomico di
riferimento 3D a ogni step time. La tecnologia Microsoft Kinect è utilizzata per
deformare in maniera rigida i segmenti anatomici e quindi permettere una visualiz-
zazione di una postura simile a quella dell’utilizzatore. La cattura dei movimenti
proposto dal sistema «Anatomie Spiegel» è basato sulla tecnologia Microsoft Kinect
V2.0 che, combinata insieme al motore di gioco Unity [56], restituisce un’animazione
fluida e realistica.
La società israeliana PrimeSense, riacquistata da Apple Inc nel 2013, ha svilup-
pato la tecnologia Kinect: una telecamera RGB dotata di un sistema infrarossi che
permette la cattura in tempo reale di una carta di profondità 3D. A partire dalla
sua prima apparizione nel 2010, la tecnologia Kinect si è resa disponibile a tut-
ti. Diversi sensori sono apparsi sul mercato, tra i quali si possono citare il sensore
Xtion sviluppato da Asus [57] o anche il progetto Tango di Google [58], per uno
sviluppo di un tablet e di uno smartphone che integrano dei sensori di profondità
50](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-61-320.jpg)
![4 – Cattura e resa del movimento
infrarosso. Recentemente, Apple Inc ha rilasciato il sensore Structure [59], che per-
mette di scannerizzare una persona in 3D o proponendo delle appllicazioni in realità
aumentata.
Il sensore più conosciuto e il più comunemente utilizzato è il sensore Kinect di
Windows [60, 61], sviluppato insieme insieme a PrimeSense, che è disponibile in due
versioni ed è associato alla console di videogiochi Xbox.
La scelta del sensore influenza la qualità e il tipo di informazioni che si è in
grado di recepire. Ogni sensore è accompagnato da un kit di sviluppo che permette
l’accesso ai dati acquisisti e ad un numero più o meno importante di utili algoritmi.
Si è scelto di utilizzare il sensore Kinect V2.0 di Windows, che si andrà a presentare
nel dettaglio.
4.2.2 La Kinect V2.0
I componenti della Kinect
La Kinect è una telecamera RGB-D ed è composta da:
• una telecamera a colori RGB. L’immagine stabile a 30 Hz (15 Hz nel caso di
bassa luminosità) e di alta risoluzione (1920x1080 pixels) permette di creare
delle applicazioni interattive di grande qualità.
• un emettitore infrarosso indipendente da tipo di luminosità presente. Emette
un raggio infrarosso a 30 Hz.
• un sensore di profondità stabile a 30 Hz basato sulla tecnologia infrarosso.
Grazie a una miglior fedeltà di profondità (512x424 pixels), il sensore ottimizza
la visualizzazione 3D. I raggi infrarosso riflessi sono convertiti in informazioni
di profondità grazue alla misura delle distanze tra l’oggetto e il sensore.
• quattro microfoni dedicati alla cattura del suono che permettono la registra-
zione del contenuto audio e l’identificazione delle sorgenti sonore e la direzione
delle onde.
La figura 4.4 indica la posizione di questi diversi componenti su una Kinect.
Zona di cattura
Si chiama «zona di cattura», il parallelogramma nel quale la Kinect è capace di
catturare le informazioni di profondità. La figura 4.5 riassume quello che c’è da
sapere riguardo la zona di cattura della Kinect V2.0.
Si può vedere che la Kinect cattura informazioni a partire dai 0.5 m fino ai 4.5
m in termini di profondità, ma è capace di acquisire informazioni su un utilizzatore
51](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-62-320.jpg)









![4 – Cattura e resa del movimento
−0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3
−0.2
−0.1
0
0.1
0.2
0.3
x [m]
y[m]
Grezzo
Filtrato
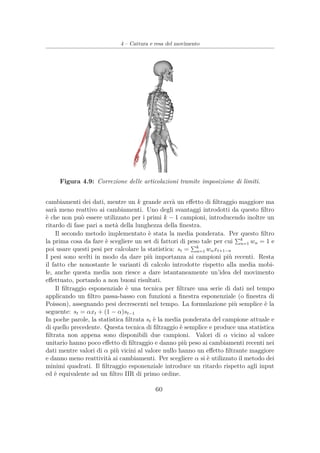
Figura 4.10: Confronto fra dati Kinect grezzi e filtrati
piuttosto che utilizzare una soluzione di tipo biomeccanico. Si è fatto la scelta di
visualizzare il movimento del corpo intero. La sezione 3.1.3 fornisce la terminologia
del movimento: l’insieme di definizioni che definisce l’insieme di movimenti che il
corpo umano è capace di compiere.
Il sistema muscolo-scheletrico è una struttura articolare. Come spiegato in se-
zione 3.1.2, il corpo umano è composto da un’insieme di articolazioni definite in
funzione del loro grado di libertà e dell’ampiezza del movimento che riescono ad
esprimere. Per avvicinarsi il più possibile al fenomeno anatomico, si è scelto di de-
finire e utilizzare lo scheletro di animazione Kinect come struttura di controllo per
poter indurre i movimenti, come spiegato in sezione 4.3.1.
In sezione 4.1.2, si sono discussi i principali metodi di skinning, più o meno
automatici, che forniscono risultati più o meno soddisfacenti. Per questo progetto,
si è scelto il metodo «Linear Blend Skinning» poiché è una delle più semplici da
implementare. In più si è a conoscenza che il LBS è il metodo più utilizzato nel
settore dei giochi video, che necessita una buona efficacia in termini di velocità di
esecuzione.
Si è anche implementato il metodo «Dual Quaternion Skinning», che in teoria
dovrebbe risolvere alcuni problemi del LBS, ma in questa specifica applicazione non
62](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-73-320.jpg)
![4 – Cattura e resa del movimento
si sono riscontrati netti miglioramenti, anzi si sono osservati comportamenti anoma-
li. Questi sono dovuti al fatto che grazie alla natura non lineare dei quaternioni, il
DQS è un metodo che permette il preservamento del volume ma richiede una scelta
più accurata dei pesi per ogni vertice della mesh. Questa scelta più accurata può
essere ottenuta attraverso la tecnica del weight painting, presente in qualsiasi soft-
ware di modellizzazione (Blender ad esempio). Questa tecnica è molto efficace ma
richiede molto tempo ed accuratezza e osservando il risultato più che soddisfacente
del LBS, ottenuto attraverso il calcolo automatico dei pesi, si è optato per l’utilizzo
di quest’ultimo metodo.
Si è presentato fino ad ora il modello di riferimento anatomico utilizzato e il
sistema di controllo utilizzato. Si parlerà ora di come associare i due, con l’aiuto di
un metodo di skinning, per poter visualizzare il modello anatomico in movimento.
4.4.1 Algoritmo di Linear Blend Skinning
In sezione 4.4 si è spiegato la scelta dell’algoritmo di skinning. L’equazione 4.1 illu-
stra il metodo LBS, esprimendo la posizione di ogni punto P della mesh in funzione
della sua posizione al passo di integrazione precedente P0. La trasformazione di
un singolo punto P è definita come la somma 3
i=0 delle matrici di deformazione
M[index[i]] applicate su P0. Ognuna di queste matrici è funzione di uno dei 25
sistemi di riferimento che compongono il sistema di controllo, di indice index[i], e
ponderata attraverso rispettivi pesi w[i]. Nel caso di punti che sono influenzati da
meno di quattro sistemi di riferimento, le matrici sono completate da indici arbitrari
con una ponderazione nulla, in modo che non influenzino lo spostamento del punto.
La somma delle ponderazioni per ogni vertice deve sempre essere unitaria.
LBS : P =
3
i=0
M[index[i]] ∗ P0 ∗ w[i] (4.1)
Le influenze sul sistema cardiovascolare, sulla pelle e sul sistema muscolare sono
distribuite tra diverse articolazioni dello scheletro di controllo gerarchico mentre le
influenze sul sistema scheletrico e gli organi sono associati ad una sola articolazione.
In questo modo durante un movimento, le ossa e gli organi non si deformano ma
si spostano semplicemente seguente il movimento effettuato dall’utilizzatore. Nel
caso delle arterie, della pelle e dei muscoli, le mesh corrispondenti si deformeranno
per meglio adattarsi alla configurazione impartita dall’utilizzatore. Nella realtà le
ossa sono strutture rigide e quindi è corretto assumere che durante un movimento
queste si spostino ma non si deformino. Nel caso degli organi invece, questi sono
strutture deformabili e quindi inizialmente anche alle loro mesh sono state associate
più di un’articolazione ma questo provocava deformazioni innaturali. Si è scelto
allora di associare una sola articolazione permettendo lo spostamento ma non la
63](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-74-320.jpg)
![4 – Cattura e resa del movimento
deformazione, anche se la scelta corretta, ma che non è stata implementata per
mancanza di tempo, sarebbe stata quella di associare per ogni tessuto un modello
che racchiudesse le caratteristiche meccaniche del materiale.
In figura 4.11 viene illustrato il principio dello skinning, attraverso un esempio
di deformazione della mesh della pelle nel software di modellizzazione Blender [32].
Come si può notare in figura 4.11a, dopo aver caricato la mesh della pelle in Blen-
der, si è definito uno scheletro di controllo gerarchico identico e corrispondente al
sistema di controllo gerarchico definito in sezione 4.3.1. Successivamente sono stati
calcolati automaticamente per ogni vertice della mesh quali elementi del sistema di
controllo influiranno sul suo movimento e in che quantità, attraverso la definizione
dei pesi. Prendendo in considerazione l’elemento braccio sinistro del sistema di con-
trollo, questi pesi possono essere visualizzati attraverso una scala a colori: i vertici
colorati in blu sono quei vertici che non saranno per nulla influenzati dal movimento
del braccio sinistro, mentre i vertici rossi si sposteranno totalmente seguendo il mo-
vimento del braccio sinistro. Poiché rosso e blu rappresentano gli estremi di questa
scala, influenze intermedie saranno rappresentate da colori intermedi.
(a) (b)
Figura 4.11: Skinning del modello (a) Modello nella sua postura anatomica di
riferimento. (b) Modello deformato che segue il movimento dello scheletro di
controllo.
Il risultato dell’applicazione di tale metodo è visualizzato in figura 4.11b. Nel
caso in cui l’utilizzatore muova il braccio sinistro in alto, o come in questo caso
64](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-75-320.jpg)
![4 – Cattura e resa del movimento
replicando tale movimento in Blender, verrà modificata di conseguenza la posizione
nello spazio dello scheletro di controllo gerarchico che a sua volta influenzerà gli
spostamenti dei vari vertici della mesh pelle. I vertici marcati in rosso, peso elevato,
seguiranno lo spostamento del braccio, mentre quelli colorati in blu, peso nullo, non
varieranno la loro posizione. Si può notare che i vertici della mano sinistra anche se
colorati di blu si sono spostati. Questo è dovuto al fatto che lo scheletro di controllo
è stato costruito in maniera gerarchica e quindi movimenti di un elemento parente
di ripercuoteranno sugli elementi figli.
Per esportare i pesi calcolati su Blender nel software utilizzato per realizzare il
sistema AnatoMimo (SOFA, come verrà spiegato in seguito nel dettaglio), è stato
realizzato uno script nel linguaggio di programmazione Python. Tale script legge
in entrata un file di tipo Collada, con tutte le informazioni necessarie (indice del
vertice, quali sono i sistemi di riferimento che ne influenzano la posizione e in che
quantità), per trasformarlo in uscita in un formato leggibile da SOFA.
4.5 Conclusione e discussione
Questo capitolo introduce la struttura di controllo e il sistema di cattura di movi-
mento che si è messo in atto nel corso della tesi. Basato sull’idea di articolare un
modello anatomico utilizzando un sensore di movimenti leggero, si è presentato qui
lo scheletro di controllo gerarchico basato sulla tecnologia Kinect .
Lo studio di Pfister e colleghi [55] suggerisce che i dati forniti dalla Kinect non
permettono un’analisi di movimenti complessi ma attraverso l’applicazione dei vin-
coli anatomicamente realistici sulle articolazioni catturate, si spera di rispondere a
questa problematica, massimizzando il realismo dei movimenti.
Si è notato che durante movimenti rapidi, può essere visualizzato un piccolo
ritardo tra il movimento dell’utilizzatore e il movimento del modello, ma non risulta
disturbante per la comprensione del movimento anatomico.
Inizialmente si è fornito al sistema di controllo gerarchico sia la posizione che
l’orientamento di ogni articolazione. Tuttavia i quaternioni, che sono responsabili
dell’orientamento, pur essendo stati filtrati dal doppio filtro esponenziale di Holt,
risultano instabili e per niente affidabili in termini di robustezza. Due sono state
le idee per risolvere il problema. La prima, più semplice e immediata, è quella che
si è adottata: fornire al sistema di controllo gerarchico solamente le posizioni delle
articolazioni dell’utilizzatore, catturate dalla Kinect. Il risultato è nettamente mi-
gliore in termini di robustezza ma si perde leggermente in termini di realismo del
movimento. La seconda possibilità, ma che non è stata affrontata per mancanza di
tempo, consisterebbe nel fornire al sistema di controllo gerarchico non più i quater-
nioni estratti dalla Kinect ma dei quaternioni costruiti da un algoritmo, a partire
65](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-76-320.jpg)




![5 – Integrazione del sistema
• fase 2: associazione dell’avatar 3D con la struttura di controllo attraverso
skinning
• fase 3: integrazione
In giallo vengono presentati i dati in entrata nel sistema: da una parte si hanno le
informazioni fornite dalla Kinect (scheletro di animazione) e dall’altra informazioni
geometriche sulle mesh del modello anatomico digitale 3D. I rettangoli verdi rappre-
sentano i blocchi del sistema che sono stati sviluppati o modificati, se già esistenti
precedentemente, nel corso dello sviluppo di AnatoMimo. Parte di questi blocchi
sono stati introdotti nel capitolo 4; quelli appartenenti alla tappa di integrazione,
verranno sviluppati nel corso di questa sezione.
Il sistema gira su un computer con processore Intel(R) Core(TM) i7, frequenza
4.00 GHz, carta grafica Nvidia GeForce GTX 960, memoria RAM di 16.0 GB. L’u-
tilizzo della Kinect V2.0 Windows vincola il fatto di dover utilizzare Windows 10 a
64 bit come sistema operativo.
Per gestire la Kinect , molti fanno la scelta di soluzioni software «prefabbricate»
come Unity3D [56], come nel caso del progetto «Anatomie Spiegel». Nell’idea a
lungo termine di poter aggiungere simulazioni biomediche o anche dei vincoli bio-
meccanici complessi e realistici nel sistema, si è optato per l’utilizzo di SOFA [62],
un framework1
interattivo di simulazione fisica sviluppato in C++ a INRIA. Inoltre
SOFA è uno strumento conosciuto in quanto è sviluppato nella squadra in cui viene
svolto il progetto AnatoMimo.
Per tutto quello che riguarda il lavoro sul modello anatomico 3D (ad es.: sche-
letro di animazione, messa in postura, decimazione della mesh, definizione dei pesi,
animazione del battito cardiaco, ecc.) si è utilizzato il software di modellizzazione
Blender [32].
5.2.1 SOFA
SOFA (Simulation Open Framework Architecture) è una libreria open-source svi-
luppata in C++, mirata principalmente alla simulazione medica computazionale [62].
SOFA scompone complessi simulatori in componenti sviluppati separatamente e or-
ganizzati in una struttura di dati chiamato grafo della scena. Ogni componente
racchiude uno degli aspetti di una simulazione, come i gradi di libertà, le forze e i
vincoli, le equazioni differenziali, gli algoritmi, i solutori, i rivelatori di collisione o i
1
Framework: termine della lingua inglese che può essere tradotto come intelaiatura o struttura,
in informatica e specificatamente nello sviluppo software, è un’architettura logica di supporto
(spesso un’implementazione logica di un particolare design pattern) su cui un software può essere
progettato e realizzato, spesso facilitandone lo sviluppo da parte del programmatore.
71](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-82-320.jpg)

![5 – Integrazione del sistema
delle architetture hardware moderne.
Grazie a questa flessibile ma anche efficiente architettura, SOFA può’ essere
usato come banco di prova per confrontare modelli e algoritmi, o come una base
per lo sviluppo di simulatori complessi e altamente performanti. SOFA è stato
rilasciato per la prima volta nel 2007 [63]. Da allora, si è evoluto verso una libreria
globale e altamente performante usata da un numero crescente di università e aziende
commerciali.
In appendice A viene presentato una semplificazione del grafo della scena costrui-
to per realizzare AnatoMimo. Essendo la scena costituita da alcuni componenti che
si ripetono molte volte (ad es.: il caricamento di tutte le mesh, la definizione di tutte
le articolazioni per il sistema di controllo gerarchico, ecc.) questi vengono presentati
solo una volta per rendere l’idea generale del grafo di scena. Il grafo di scena è stato
realizzato utilizzando il linguaggio di programmazione XML.
In appendice B invece viene mostrato quello che rappresenta il cuore del com-
ponente realizzato durante il corso della tesi, per estrarre le informazioni in uscita
dalla Kinect e renderle utilizzabili da altri componenti di SOFA. Tale componente
è stato realizzato come plugin di SOFA, cioè come un programma non autonomo,
a sé stante che interagisce con SOFA per ampliarne o estenderne le funzionalità
originarie, principalmente per due motivi: per privatizzare il codice del plugin, in
quanto il codice sorgente di SOFA è open-source, e per non compromettere il codice
sorgente di quest’ultimo. In parole povere questo componente controlla se il senso-
re Kinect è presente, se è stato aperto correttamente allora acquisisce i frame del
sensore e controlla se nella zona di acquisizione imposta si trova un utilizzatore. In
caso negativo restituisce le posizioni di un utilizzatore generico in posizione ferma
mentre se viene percepito un utilizzatore viene eseguita un’analisi per catturare le
posizioni in tempo reale delle articolazioni del soggetto. Il tutto viene eseguito ad
ogni step time della simulazione.
5.2.2 Tempo reale e cadenza delle immagini
Si è spiegato in sezione 1.1 il contesto importante del tempo reale per questo lavoro.
Qualsiasi sia la tecnica di animazione utilizzata, esistono delle regole per quanto
riguarda la cadenza delle immagini in modo tale che ci sia l’illusione di un movimento
continuo. L’illusione può essere data a partire da 10 immagini al secondo (FPS2
) e
il cervello umano fa tutto il resto. Nel quadro dei film per la televisione, lo standard
è di 25, 30 o 50 immagini per secondo a seconda della zona geografica; per il cinema
invece, lo standard è fissato a 24 immagini al secondo; per i videogiochi, i fabbricanti
di console limitano a 30 immagini al secondo.
2
FPS: Frame Per Second
73](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-84-320.jpg)



![5 – Integrazione del sistema
la posizione dell’articolazione base, si classificano gli utilizzatori in funzione della
distanza dal sensore e quindi si utilizzano i dati delle posizioni delle articolazioni
solamente dell’utilizzatore più vicino alla Kinect. Per ogni utilizzatore la Kinect
invia ad ogni step time, una variabile che dice se l’utilizzatore è catturato oppure no.
Questo permetterà quindi di sapere a che momento l’utilizzatore è uscito dal campo
di visione della Kinect e quindi si potrà interrompere l’esperienza. Tuttavia questa
modalità risulta problematica nel contesto di un’esposizione come quella “De l’Homo
Numericus au Citoyen Numérique”. Oltre al fatto che imporrebbe la presenza di una
persona debita a far ripartire la demo per ogni nuovo utilizzatore, al rilancio della
simulazione questa impiega dai 30 ai 45 secondi per caricarsi e questo causerebbe un
forte rallentamento di afflusso alla demo. Inoltre, la scelta da parte della Kinect di
chi sia l’utilizzatore più vicino ad essa, potrebbe essere compromessa da persone che,
incuriosite, si avvicinano allo schermo per guardare meglio, “rubando” il controllo
del modello anatomico 3D al vero utilizzatore del sistema.
Queste considerazioni portano di fatto alla definizione di una zona di cattura
della Kinect ben precisa, rappresentata nel mondo reale da un tappeto rettango-
lare di dimensioni 150x120 cm disposto nello spazio come in figura 5.2b. Questo
rettangolo si trova nel sweet spot di cattura della Kinect, come spiegato in sezio-
ne 4.2.2, e permette al sensore di catturare un utilizzatore solo se questo si trova
all’interno del rettangolo, rendendo invisibile alla Kinect qualsiasi utilizzatore che
si trova al di fuori di questa zona. Lanciata la simulazione una prima volta, dopo
che il primo utilizzatore ha interagito con il modello anatomico 3D ed è uscito dal
rettangolo, il sistema, non vedendo più nessuno utilizzatore nella zona di cattura,
fornisce al modello posizioni di un utilizzatore generico in posizione ferma, pronto
ad aspettare nuove interazioni fornite da un nuovo utilizzatore, appena questo entra
nel rettangolo di cattura. Questa modalità è più adatta ad un contesto come quello
di un’esposizione, in quanto permette alla demo di girare in teoria all’infinito, garan-
tendo un’ottima robustezza sulla scelta dell’utilizzatore principale in un ambiente
affollato.
5.3 Visualizzazione
«Qual è la visualizzazione la più adatta al trasferimento delle conoscenze?» È la
domanda alla quale si cercherà di rispondere in questa sezione presentando e spie-
gando le diverse scelte che sono state fatte. King e colleghi concludono, [64], che
lo sviluppo adeguato dell’interfaccia e una visualizzazione adatta ai bisogni, sono
gli elementi chiave per rendere i sistemi virtualmente utilizzabili. Questi punti di-
pendono dalle conoscenze che si vuole visualizzare e dal contesto del lavoro. Inoltre
la percezione delle strutture anatomiche può essere influenzata dal punto di vista,
dall’orientamento e dalla scala dei dati visualizzati.
77](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-88-320.jpg)
![5 – Integrazione del sistema
Questa sezione comincerà con un’introduzione a OpenGL, lo strumento utilizzato
per realizzare il rendering del sistema, per poi parlare effettivamente delle scelte fatte
riguardanti la visualizzazione del modello anatomico 3D.
5.3.1 OpenGL
OpenGL (Open Graphics Library) [65] è una specifica che definisce una API (Ap-
plication Program Interface) per più linguaggi e per più piattaforme per scrivere
applicazioni che producono computer grafica 2D e 3D. OpenGL è quindi un’inter-
faccia a cui un’applicazione può avere accesso e permette di controllare i sottosistemi
grafici della macchina sulla quale l’applicazione sta girando. Prima di OpenGL, ogni
compagnia, che sviluppava un’applicazione grafica, doveva tipicamente scrivere del
codice riguardante la parte grafica per ogni sistema operativo e tenere anche in conto
del tipo di hardware grafico. Con OpenGL, un’applicazione può produrre gli stessi
risultati in qualsiasi sistema operativo usando qualsiasi adattatore grafico aderente
ad OpenGL.
OpenGL specifica una serie di “comandi” o funzioni eseguite immediatamente e
ognuno di questi dirige un’azione di disegno o causa effetti speciali. I comandi del
programma vengono presi da OpenGL e inviati agli hardware grafici sottostanti. In
computer graphic generalmente si hanno tante ripetizioni di compiti molto simili e
questi compiti sono indipendenti gli uni dagli altri. OpenGL può spezzare il progetto
e lavorare sui suoi elementi fondamentali in parallelo attraverso una combinazione
di pipeling e parallelismo. OpenGL porta con sé una grande quantità di capacità
incorporate che possono essere richiamate attraverso l’API. Questo include superfici
nascoste rimovibili, alpha blending (trasparenza), antialiasing, texture mapping,
operazioni con i pixel, trasformazioni visive e di modello.
Le GPU (graphics processing unit) oggigiorno sono molto flessibili e consistono
in un grande numero di piccoli processori programmabili chiamati shader core, che
fanno girare piccoli programmi chiamati shader. Ognuno di questi shader core pos-
siede una bassa produttività, eseguendo una singola istruzione del shader in uno o
più cicli; tuttavia ogni GPU può contenere dai 10 ai 1000 di questi core e insieme
possono eseguire una grande quantità di lavoro.
Il modello seguito da OpenGL è una pipeline. Il flusso di dati è in un senso
solo, con dati creati dai comandi chiamati dal programma, entrando dall’inizio della
pipeline e fluendo da uno stage all’altro fino a raggiungerne la fine. Lungo il percorso
blocchi shaders (che sono programmabili in quanto eseguono gli shaders che vengono
forniti dal programmatore) e funzioni fisse possono prendere diversi dati in input
a partire da buffer o texture, che sono strutture per immagazzinare informazioni
che saranno poi usate nella resa grafica (rendering). Alcuni passaggi nella pipeline
possono anche salvare dati in questi buffer o texture, permettendo all’applicazione
di leggere o salvare dati.
78](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-89-320.jpg)



![5 – Integrazione del sistema
• una scelta in funzione della profondità: si tratta di cambiare il contenuto
visibile in funzione della posizione dell’utilizzatore rispetto alla Kinect . Nel
caso del progetto «Anatomie Spiegel» [30], si tratta di cambiare i sistemi
anatomici visibili e le annotazioni associate.
• una scelta con le mani: si tratta di accedere a delle opzioni attraverso la posi-
zione delle mani o anche i movimenti delle braccia. Il «Magic Mirror» [28] pro-
pone di cambiare lo strato anatomico visibile in funzione del posizionamento
in altezza della mano.
Anche nel contesto del progetto AnatoMimo, si è deciso che questo secondo livello
di interazione venga raggiunto lasciando la libertà all’utente di scegliere quale layer
venga rappresentato a video. L’utilizzatore potrà scegliere tra uno dei cinque layer
possibili attraverso l’utilizzo di un wireless presenter, rappresentato in figura 5.4b.
Partendo dallo strato più esterno (la pelle), schiacciando sul pulsante “avanti” si
potrà scendere al tessuto muscolare e se si schiaccerà ancora lo stesso pulsante si ac-
cederà al sistema vascolare. Ancora altri due click sul pulsante “avanti” permettono
di raggiungere gli organi e in ultimo lo scheletro. Ovviamente cliccando sul pulsante
“indietro” si potrà risalire e tornare in superficie. Questa idea di navigazione all’in-
terno dei diversi strati anatomici è stata presa in prestito dagli atlanti anatomici
interattivi, presentati in sezione 2.2.4.
Ogni volta che un pulsante del wireless presenter viene cliccato, la transizione
tra lo strato anatomico attuale e quello scelto avviene attraverso una dissolvenza.
Ogni transizione, che dura un secondo circa, è stata realizzata modificando il livello
di trasparenza4
della mesh in questione nel tempo. Se si vuol far scomparire lo
strato della pelle e nel frattempo far comparire i muscoli, il livello di trasparenza
deve diminuire linearmente nel caso della pelle fino a che non scompaia totalmente
mentre nello stesso istante il livello di trasparenza dei muscoli deve aumentare fino
a che non siano totalmente visibili.
5.5 Animazione del battito cardiaco
Per rendere più realistica la visualizzazione dello strato interno del corpo umano, si è
deciso di arricchire la visualizzazione del modello del cuore attraverso l’introduzione
di un’animazione del battito cardiaco. Inoltre tale battito cardiaco risulta essere
funzione dell’attività motoria dell’utilizzatore durante la durata della simulazione.
4
Livello di trasparenza: spesso indicato con alpha, rappresenta un intervallo di valori da zero
ad uno, in cui lo zero rappresenta la trasparenza completa e uno identifica l’oggetto associato
completamente visibile.
82](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-93-320.jpg)

![5 – Integrazione del sistema
la frequenza cardiaca, si è pensato di utilizzare come variabile fisica, per discriminare
il movimento dell’utilizzatore, l’energia cinetica. In realtà si utilizza una grandezza
proporzionale all’energia cinetica definita come E = 3
i=0 v2
i , con vi la velocità del-
la i-esima articolazione. Tale grandezza risulta essere proporzionale in quanto nel
calcolo non subentra la massa, poiché nel sistema le articolazioni non presentano
massa. Ad ogni step time della simulazione, si aggiungono le nuove velocità ma
nello stesso tempo si decrementa di un coefficiente scelto il valore appena calcolato
in modo tale che la frequenza possa tornare al minimo nel caso in cui l’utilizzatore
non si muova per un lungo periodo.
Se viene effettuato un movimento brusco, come il picco più alto del grafico in
figura 5.5, le velocità dei segmenti interessati saranno elevate e quindi E si alze-
rà di molto. Se invece vengono effettuati dei movimenti semplici ma ripetuti nel
tempo, come nei primi picchi a sinistra in figura 5.5, le velocità dei segmenti inte-
ressati saranno basse ma prolungate nel tempo e quindi E aumenterà leggermente
nel tempo.
0 5 10 15 20 25 30
0
0.5
1
1.5
2
·104
t [s]
E[J]
Figura 5.5: Grandezza energetica per identificare la quantità di moto
Si è quindi definita una corrispondenza tra il valore della frequenza cardiaca,
ovvero la velocità con cui vengono aggiornati le posizioni dei vertici della mesh del
84](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-95-320.jpg)



![6 – Conclusione
Conclusione
L’AnatoMimo, strumento sviluppato nel corso di questa tesi, è attualmente in uno
stadio sperimentale. La pertinenza dello strumento nel quadro dell’autoappren-
dimento di conoscenze anatomiche complesse e dinamiche rimane da validare. Si
spera in un futuro prossimo di poter costruire e validare uno strumento completo,
attraverso l’aiuto di studenti e insegnanti di anatomia umana.
Come si è appena visto, può ancora essere migliorato: a livello della cattura dei
movimenti, dell’interfaccia, dell’interazione e della visualizzazione delle conoscenze.
Questo strumento permette già di aprire una riflessione sul suo utilizzo in diversi
domini, come nel quadro della formazione in anatomia. Si parlerà di questo nella
sezione successiva.
6.3 Settori di applicazione di questo lavoro
6.3.1 Settore medico e paramedico
L’ipotesi secondo la quale l’apprendimento sarebbe facilitato da un’esperienza corpo-
rale rientra nella nozione di incarnazione o «embodiment». Questo concetto derivan-
te dalla psicologia cognitiva fa riferimento ai processi cognitivi basati sulle esperienze
sensoriali e sulle posture corporali.
Questo lavoro potrebbe contribuire a nuove tecnologie pedagogiche di insegna-
mento della medicina.
6.3.2 Apertura ad altri domini
Questo strumento è stato inizialmente creato per delle applicazioni nel dominio
medico e paramedico. Si è tuttavia notato nel corso del suo sviluppo, che AnatoMimo
abbia un enorme potenziale da offrire in altri settori. Si può citare l’applicazione nel
dominio del grande pubblico attraverso musei ed esposizioni, come il sistema Mir’Os
[66] che permette a qualsiasi persona di scoprire in maniera ludica l’anatomia in
movimento e le nozioni anatomiche associate. Seguendo questo esempio, si è deciso
di creare una versione demo del sistema in modo che possa diventare una delle
attrazioni presenti nell’esposizione itinerante “De l’Homo Numericus au Citoyen
Numérique”.
89](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-100-320.jpg)


![A – Grafo della scena
<MechanicalStateFilter name="filter" template="Vec1d"
indices="27 29" range="30 -150 0 -90"/>
<Node name="Physic">
<MechanicalObject template="Rigid" name="DOFs" showObjectScale="0.001" position="
0 0 0 0 0 0 1
...
0 0 0 0 0 0 1" />
<Node name="points3D">
<MechanicalObject template="Vec3d" name="DOFs_3D" />
<IdentityMapping name="IdMapping" template="Rigid3d,Vec3d" input="@../DOFs"
output="@DOFs_3D" />
<RestShapeSpringsForceField template="Vec3d" name="ControlSprings"
stiffness="500000" external_rest_shape="../../../points3D/trackedDOFs_3D"
points="1 2 3 4 5 6 9 10 11 12 13 14 15 16 17 18 19 20"
external_points="0 1 1 20 20 3 4 8 5 9 12 16 13 17 15 19 6 10" />
</Node>
<UniformMass template="Rigid" name="mass" mass="1 1 [1 0 0,0 1 0,0 0 1]"
showAxisSizeFactor="0.075" />
<ArticulatedSystemMapping input1="@../Articulations" output="@DOFs"
isMechanical="true" />
<Node name="Skeleton">
<VisualStyle name="SkeletonVisualStyle" displayFlags="showVisual" />
<Node name="SpineBase">
<Node name="VisualModel">
<include href="data/Shading_bone.xml"
Visual__scale="0.025"
Visual__filename="@InputMesh/spine_base.filename"
Visual__translation="@../../../../../SpineBase/pivot.output_position"
DiffuseMap__textureFilename="data/texture/skeleton_legs.png"
/>
<RigidMapping template="Rigid3d,ExtVec3f" index="1" input="@../../../DOFs"
output="@Visual" />
</Node>
</Node>
...
<Node name="Muscles">
<Node name="VisualModel">
<OglModel name="Visual" src="@../../../../../InputMesh/muscles"
translation="@../../../../../Muscles/pivot.output_position"
tags="muscles" color="0.9 0.4 0.2" />
<include href="data/
SkinningMapping_MuscoliPesiCopiati_Ancheinblendermanoinsofa.xml" />
</Node>
</Node>
</Node>
</Node>
<ArticulatedHierarchyContainer />
<Node name="articulationCenters">
<Node name="SpineBaseArticulation">
<ArticulationCenter parentIndex="0" childIndex="1"
posOnParent="0 0 0" posOnChild="0 0 0" articulationProcess="0" />
<Node name="articulations">
<Articulation translation="true" rotation="false" rotationAxis="1 0 0"
articulationIndex="0" />
<Articulation translation="true" rotation="false" rotationAxis="0 1 0"
articulationIndex="1" />
<Articulation translation="true" rotation="false" rotationAxis="0 0 1"
articulationIndex="2" />
<Articulation translation="false" rotation="true" rotationAxis="1 0 0"
articulationIndex="3" />
<Articulation translation="false" rotation="true" rotationAxis="0 1 0"
94](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-105-320.jpg)

![B – Plugin Kinect
}
void KinectExtractor::handleEvent(core::objectmodel::Event *event)
{
if (sofa::simulation::AnimateBeginEvent::checkEventType(event))
this->update();
}
template<class Interface>
static inline void KinectExtractor::safeRelease(Interface *&interfaceToRelease)
{
if (interfaceToRelease != nullptr)
{
interfaceToRelease->Release();
interfaceToRelease = nullptr;
}
}
void KinectExtractor::openKinectSensor()
{
HRESULT hr = GetDefaultKinectSensor(&sensor);
//If the function succeeds, open the sensor
if (SUCCEEDED(hr)) {
hr = sensor->Open();
if (SUCCEEDED(hr))
{
//Get a body frame source from which we can get our body frame reader
IBodyFrameSource *bodyFrameSource = nullptr;
hr = sensor->get_BodyFrameSource(&bodyFrameSource);
if (SUCCEEDED(hr))
{
hr = bodyFrameSource->OpenReader(&bodyFrameReader);
std::cout << "Success opening kinect" << std::endl;
}
//We’re done with bodyFrameSource, so we’ll release it
safeRelease(bodyFrameSource);
}
}
if (sensor == nullptr || FAILED(hr))
{
std::cerr << "Cannot find any sensors.n";
//return E_FAIL;
}
}
void KinectExtractor::processKinectInfo()
{
while (bodyFrameReader != nullptr)
{
IBodyFrame *bodyFrame = nullptr;
HRESULT hr = bodyFrameReader->AcquireLatestFrame(&bodyFrame);
if (SUCCEEDED(hr)) {
IBody *bodies[BODY_COUNT] = { 0 };
hr = bodyFrame->GetAndRefreshBodyData(_countof(bodies), bodies);
for (int i = 0; i < _countof(bodies); i++)
{
IBody *body = bodies[i];
BOOLEAN isTracked = false;
body->get_IsTracked(&isTracked);
if (FAILED(hr) || isTracked == false)
97](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-108-320.jpg)
![B – Plugin Kinect
continue;
{
Joint joints[JointType_Count];
body->GetJoints(_countof(joints), joints);
if (joints[0].Position.Z<m_capture_zone.getValue()[1] &&
joints[0].Position.Z>m_capture_zone.getValue()[0] &&
joints[0].Position.X>m_capture_zone.getValue()[2] &&
joints[0].Position.X<m_capture_zone.getValue()[3])
activeBodyIndex = i;
}
}
if (SUCCEEDED(hr)) {
processBodies(bodies, activeBodyIndex);
//After body processing’s done,we’re done with our bodies so release them.
for (unsigned int bodyIndex = 0;bodyIndex < _countof(bodies);bodyIndex++)
safeRelease(bodies[bodyIndex]);
safeRelease(bodyFrame);
return;
}
}
else if (sensor) {
BOOLEAN isSensorAvailable = false;
hr = sensor->get_IsAvailable(&isSensorAvailable);
if (SUCCEEDED(hr) && isSensorAvailable == false)
{
std::cout << "No available sensor is found.n";
helper::WriteAccessor<Data<VecRigid> > out = m_bodyJoints;
out.resize(0);
for (int a = 0; a < JointType_Count; a++)
{
const sofa::defaulttype::Quat quat(0, 0, 0, 1);
sofa::defaulttype::Vec3d pos;
pos[0] = initial_rigid[a].position.X;
pos[1] = initial_rigid[a].position.Y;
pos[2] = initial_rigid[a].position.Z;
Rigid oneJoint(pos, quat);
out.push_back(oneJoint);
}
}
}
else
std::cerr << "Trouble reading the body frame.n";
}
}
void KinectExtractor::processBodies(IBody **bodies, int activeBodyIndex)
{
sofa::helper::AdvancedTimer::stepBegin("KinectProcess");
IBody *body = bodies[activeBodyIndex];
//Get the tracking status for the body, if it’s not tracked we’ll skip it
BOOLEAN isTracked = false;
HRESULT hr = body->get_IsTracked(&isTracked);
if (FAILED(hr) || isTracked == false) {
helper::WriteAccessor<Data<VecRigid> > out = m_bodyJoints;
out.resize(0);
for (int a = 0; a < JointType_Count; a++)
{
const sofa::defaulttype::Quat quat(0, 0, 0, 1);
sofa::defaulttype::Vec3d pos;
pos[0] = initial_rigid[a].position.X;
98](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-109-320.jpg)
![B – Plugin Kinect
pos[1] = initial_rigid[a].position.Y;
pos[2] = initial_rigid[a].position.Z;
Rigid oneJoint(pos, quat);
out.push_back(oneJoint);
}
return;
}
//If we’re here the body is tracked so get the joint properties for this skeleton
Joint joints[JointType_Count];
hr = body->GetJoints(_countof(joints), joints);
JointOrientation jointsOrientation[JointType_Count];
hr = body->GetJointOrientations(_countof(jointsOrientation), jointsOrientation);
if (SUCCEEDED(hr)) {
helper::WriteAccessor<Data<VecRigid> > out = m_bodyJoints;
out.resize(0);
filterPos.UpdateFilter(joints);
const CameraSpacePoint* newPos = filterPos.GetFilteredJoints();
if (joints[0].Position.Z<m_capture_zone.getValue()[1] &&
joints[0].Position.Z>m_capture_zone.getValue()[0] &&
joints[0].Position.X>m_capture_zone.getValue()[2] &&
joints[0].Position.X<m_capture_zone.getValue()[3])
{
for (int a = 0; a < JointType_Count; a++)
{
sofa::defaulttype::Vec3d pos(newPos[a].X, newPos[a].Y, newPos[a].Z);
Rigid oneJoint(pos, rigid[a].orientation);
out.push_back(oneJoint);
}
}
else
{
for (int a = 0; a < JointType_Count; a++)
{
const sofa::defaulttype::Quat quat(0, 0, 0, 1);
sofa::defaulttype::Vec3d pos;
pos[0] = initial_rigid[a].position.X;
pos[1] = initial_rigid[a].position.Y;
pos[2] = initial_rigid[a].position.Z;
Rigid oneJoint(pos, quat);
out.push_back(oneJoint);
}
}
}
sofa::helper::AdvancedTimer::stepEnd("KinectProcess");
}
void KinectExtractor::initPosition()
{
initial_rigid[0].position={(float)-0.0843352, (float)-0.058137, (float)0.0795146};
...
initial_rigid[24].position={(float)0.310567, (float)-0.15552, (float)0.0526308};
}
} // namespace component
} // namespace sofa
#endif
99](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-110-320.jpg)
![Bibliografia
[1] LUSK, M. M., AND ATKINSON, R. K. Animated pedagogical agents : Does
their degree of embodiment impact learning from static or animated worked
examples? Applied cognitive psychology 21, 6 (2007), 747–764.
[2] AYMERIC, G., STÉPHANE, C., CHRISTOPHE, B., PATRICE, T., AND
CHRISTIAN, C. Relationship between spatial abilities, mental rotation and
functional anatomy learning.
[3] REBECCA S., L., ANN C., Z., CARLA A., R., AND TODD M., H. Effect
of visual– spatial ability on medical students performance in a gross anatomy
course.
[4] SANDRA, B., ROSITA, H., ROBERT, H., AND GERTRAUD, G. Improving
spatial abilities with a 3d immersive environment. a pilot study.
[5] KAMPHUIS, C., BARSOM, E., SCHIJVEN, M., AND CHRISTOPH, N. Aug-
mented reality in medical education? Perspectives on medical education 3, 4
(2014), 300–311.
[6] FREILER, T. J. Learning through the body.
[7] COHEN, B. B. http ://www.experientialanatomy.org.
[8] BUZAN, T., AND BUZAN, B. How to mind map. Thorsons London, 2002.
[9] ANATOMAGE, 2012. http ://medical.anatomage.com/.
[10] KAMINA, P. Anatomie clinique. Maloine, France, 2009.
[11] CORPORATION, I., 1999. http ://www.innerbody.com/.
[12] BIODIGITAL, 2014. https ://www.biodigital.com/.
[13] ZYGOTEBODY, 2014. https ://zygotebody.com/.
[14] ZOOLOGICO LA SPECOLA, M., MARTA, P., AND GEORGES, D.-H. Ency-
clopaedia anatomica. Collection complète des cires anatomiques. Taschen GmbH,
2003.
[15] PRINTING (CJP), C. http ://www.materialise.fr/impression-3D/cjp.
[16] 3DSYSTEMS, 2013. http ://www.3dsystems.com/.
[17] J. B. ANTOINE, M., AND MAX A., V. A survey of medical image registration,
March 1998.
[18] GRABER, M. A., WYATT, C., KASPAREK, L., AND XU, Y. Does simula-
tor training for medical students change patient opinions and attitudes toward
100](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-111-320.jpg)
![Bibliografia
medical student procedures in the emergency department ? MICCAI 12 (2005),
635–639.
[19] KNEEBONE, R. Evaluating clinical simulations for learning procedural skills
: a theorybased approach. Academic medicine : journal of the Association of
American Medical Colleges 80 (2005), 549–553.
[20] COTIN, S., DELINGETTE, H., AND AYACHE, N. Real-time elastic deforma-
tions of soft tissues for surgery simulation. IEEE Transactions on Visualization
and Computer Graphics 5, 1 (Jan. 1999), 62–73.
[21] AYMERIC, G., STÉPHANE, C., CHRISTOPHE, B., PATRICE, T., AND
CHRISTIAN, C. Relationship between spatial abilities, mental rotation and
functional anatomy learning.
[22] KAMPHUIS, C., BARSOM, E., SCHIJVEN, M., AND CHRISTOPH, N. Aug-
mented reality in medical education? Perspectives on medical education 3, 4
(2014), 300–311.
[23] NAVAB, N., BLUM, T., WANG, L., OKUR, A., AND WENDLER, T. First
deployments of augmented reality in operating rooms. IEEE Computer 45, 7
(2012), 48–55.
[24] MICROSOFT. HoloAnatomy, 2016. http://www.digitaltrends.com/virtual-
reality/hololens-holoanatomy-award-jackson-hole-science-media-awards/.
[25] MIRRACLE, 2011-2013. http ://campar.in.tum.de/files/mirracle/.
[26] MENG, M., FALLAVOLLITA, P., BLUM, T., ECK, U., SANDOR, C., WEI-
DERT, S., WASCHKE, J., AND NAVAB, N. Kinect for interactive ar anatomy
learning. In Mixed and Augmented Reality (ISMAR), 2013 IEEE International
Symposium on (2013), IEEE, pp. 277–278.
[27] MA, M., FALLAVOLLITA, P., SEELBACH, I., VON DER HEIDE, A. M.,
EULER, E., WASCHKE, J., AND NAVAB, N. Personalized augmented reality
for anatomy education. In Clinical Anatomy (May 2016), vol. 29, pp. 446–453.
[28] BLUM, T., KLEEBERGER, V., BICHLMEIER, C., AND NAVAB, N. mirracle
: An augmented reality magic mirror system for anatomy education. In Virtual
Reality Short Papers and Posters (VRW), 2012 IEEE (2012), IEEE, pp. 115–116.
[29] MAITRE, X. Newscientist : Digital mirror reveals what lies under your skin,
April 2014.
[30] BORNER, A., AND KIRSCH, S. Anatomie spiegel. http
://www.qwertzus.com/anatomie-spiegel/, February 2015.
[31] PIXOLOGIC. Zbrush, 2015. https ://pixologic.com/.
[32] FOUNDATION, B., 2002-2016. https ://www.blender.org/.
[33] ICT. Light stage 6, 2006. https://www.fxguide.com/featured/light_stage_6/.
[34] DEBEVEC, P., HAWKINS, T., TCHOU, C., DUIKER, H.-P., SAROKIN, W.,
AND SAGAR, M. Acquiring the reflectance field of a human face. In Proceedings
101](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-112-320.jpg)
![Bibliografia
of the 27th Annual Conference on Computer Graphics and Interactive Techni-
ques (New York, NY, USA, 2000), SIGGRAPH ’00, ACM Press/Addison-Wesley
Publishing Co., pp. 145–156.
[35] ANGUELOV, D., SRINIVASAN, P., KOLLER, D., THRUN, S., RODGERS,
J., AND DAVIS, J. Scape : Shape completion and animation of people. ACM
Trans. Graph. 24, 3 (July 2005), 408–416.
[36] BOUAZIZ, S., AND PAULY, M. Dynamic 2d/3d registration for the kinect. In
ACM SIGGRAPH 2013 Courses (New York, NY, USA, 2013), SIGGRAPH ’13,
ACM, pp. 21 :1–21 :14.
[37] BOGO, F., ROMERO, J., LOPER, M., AND BLACK, M. J. FAUST : Dataset
and evaluation for 3D mesh registration. In Proceedings IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR) (Columbus, Ohio, USA, jun 2014), pp.
3794 –3801.
[38] OF MEDICINE, C. N. L. The visible human project, 2014. https
://www.nlm.nih.gov/research/visible/.
[39] HÖHNE, K. H. Voxel-man 3d navigator, 1985.
http://www.voxel-man.com/gallery/ visible_human/inner_organs/.
[40] ZACHOW, S., ZILSKE, M., AND HEGE, H.-C. 3D reconstruction of individual
anatomy from medical image data : Segmentation and geometry processing. ZIB,
2007.
[41] ZURICH MED TECH. Sim4life, 2010. http://www.zurichmedtech.com/.
[42] ANDREAS, C., WOLFGANG, K., ECKHART G., H., KATHARINA, H.,
MARCEL, Z., ESRA, N., WOLFGANG, R., ROLF, J., WERNER, B., JI, C.,
BERTHOLD, K., PETER, S., HANS-PETER, H., JIANXIANG, S., MICHAEL,
O., DOMINIK, S., ANTHONY, K., JOSHUA W., G., AND NIELS, K. The vir-
tual family–development of surface-based anatomical models of two adults and
two children for dosimetric simulations. vol. 55, p. N23–N38.
[43] COMPANY, T. Z., 2010. https ://www.zygote.com/.
[44] JACOBS, J., BARBIC, J., EDWARDS, E., DORAN, C., AND VAN STRA-
TEN, A. How to build a human : Practical physics-based character animation.
In Proceedings of the 2016 Symposium on Digital Production (New York, NY,
USA, 2016), DigiPro ’16, ACM, pp. 7–9.
[45] UNIVERSITÉ CLAUDE BERNARD, L. ., 2012. http ://anatomie3d.univ-
lyon1.fr/.
[46] THIRIET, P., AND RASTELLO, O., 2013. https ://www.youtube.com/watch
?v=KsYt96PWOOk.
[47] MAYA. A. Maya muscle plugin, 2011. http://download.autodesk.com/us/
support/files/muscle.pdf.
[48] AUTODESK. Maya, 1998-2016. http://www.autodesk.fr/products/maya/
overview.
102](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-113-320.jpg)
![Bibliografia
[49] LIU, L., YIN, K., WANG, B., AND GUO, B. Simulation and control of skeleton-
driven soft body characters. ACM Trans. Graph. 32, 6 (Nov. 2013), 215 :1–215
:8.
[50] LANDER, J. Skin them bones : Game programming for the web
generation.Game Developer Magazine, May 1998.
[51] LANDER, J. Over my dead, polygonal body. Game Developer Magazine,
October 1999.
[52] KAVAN, L., COLLINS, S., ŽÁRA, J., AND O’SULLIVAN, C. Skinning with
dual quaternions. In Proceedings of the 2007 Symposium on Interactive 3D
Graphics and Games (New York, NY, USA, 2007), I3D ’07, ACM, pp. 39–46.
[53] C., N., R.K., J., A., L., D., H., A., L., A., A., P., L., A., S., AND P., W. Foot
kinematics during walking measured using bone and surface mounted markers.
3412– 3423.
[54] MENG, M., FALLAVOLLITA, P., BLUM, T., ECK, U., SANDOR, C., WEI-
DERT, S., WASCHKE, J., AND NAVAB, N. Kinect for interactive ar anatomy
learning. In Mixed and Augmented Reality (ISMAR), 2013 IEEE International
Symposium on (2013), IEEE, pp. 277–278.
[55] PFISTER, A., WEST, A. M., BRONNER, S., AND NOAH, J. A. Comparative
abilities of microsoft kinect and vicon 3d motion capture for gait analysis. Journal
of medical engineering and technology 38, 5 (2014), 274–280.
[56] UNITY3D, 2016. https ://unity3d.com/.
[57] ASUS. Xtion pro live.
[58] GOOGLE. Tango : see more of your world.
[59] INC, A. Structure.
[60] MICROSOFT. Kinect for windows sdk 2.0.
[61] MICROSOFT. Kinect for xbox one.
[62] SOFA. https://www.sofa-framework.org/
[63] F. Faure, C. Duriez, H. Delingette, J. Allard, Benjamin Gilles, et al.. SO-
FA: A Multi-Model Framework for Interactive Physical Simulation. Yohan Pa-
yan. Soft Tissue Biomechanical Modeling for Computer Assisted Surgery, 11,
Springer, pp.283-321, 2012, Studies in Mechanobiology, Tissue Engineering and
Biomaterials
[64] KING, A. P., EDWARDS, P. J., JR., C. R. M., DE CUNHA, D. A., GASTON,
R. P., CLARKSON, M. J., HILL, D. L. G., HAWKES, D. J., FENLON, M.
R., STRONG, A. J., COX, T. C. S., AND GLEESON, M. J. Stereo augmented
reality in the surgical microscope. Presence 9, 4 (2000), 360–368.
[65] OPENGL SUPERBIBLE. http://www.openglsuperbible.com/
[66] DAUPHINOIS, M. Exposition confidences d’outre-tombe, squelettes en que-
stion. http ://lacasemate.fr/visiter/hors-les-murs/confidences-doutre-tombe/.
103](https://image.slidesharecdn.com/2dc1d56b-4f79-4750-9458-cb2ab1672ad5-161213160747/85/a4_centrata-114-320.jpg)





















![[Thesis] IBSS: Intelligent Brake Support System](https://cdn.slidesharecdn.com/ss_thumbnails/tesi-160804132808-thumbnail.jpg?width=640&height=640&fit=bounds)

































