Download as PDF, PPTX
![12
Dynamic Response to Injection Error
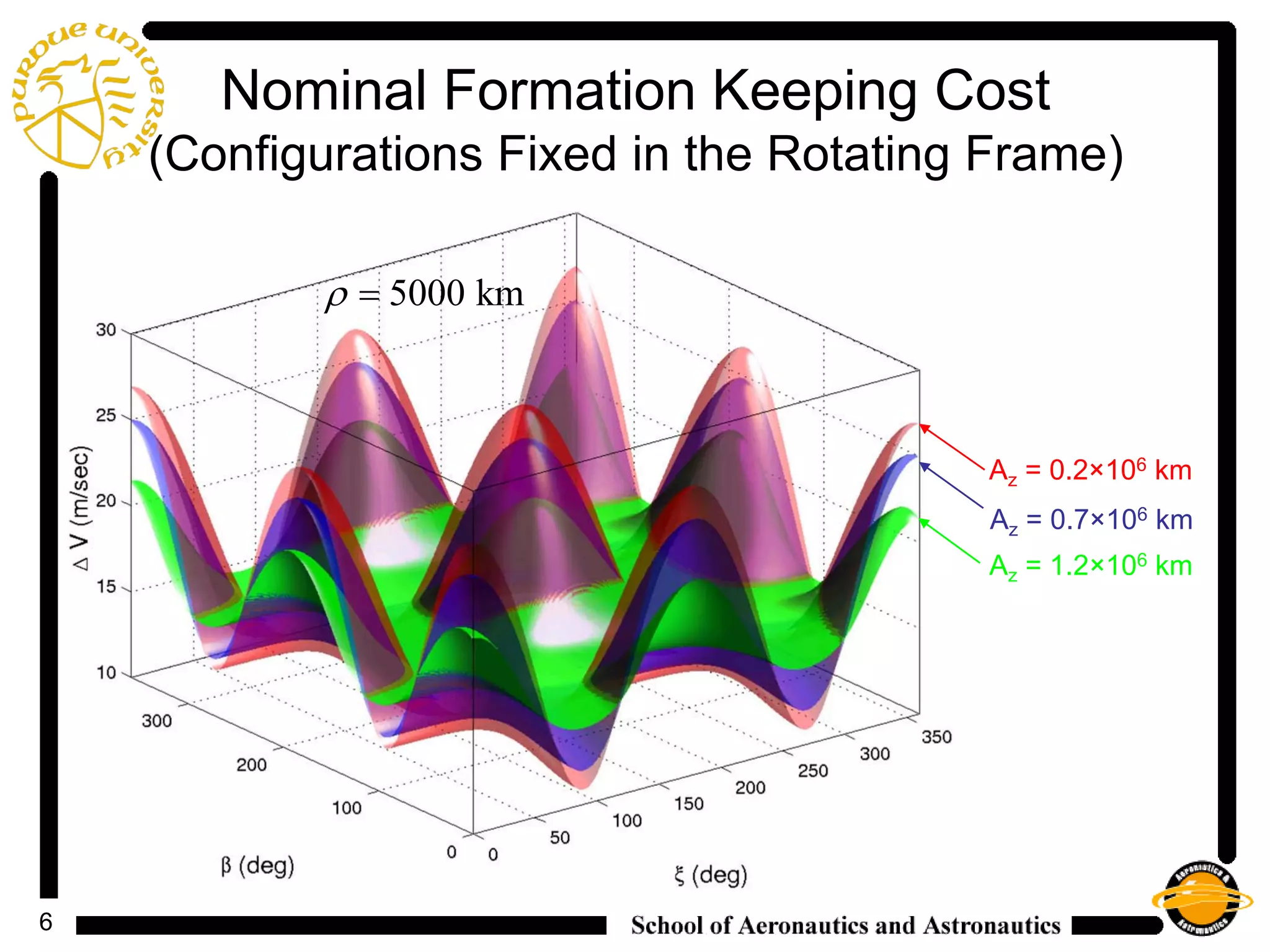
5000 km, 90 , 0ρ ξ β= = =
LQR Controller IFL Controller
( ) [ ]0 7 km 5 km 3.5 km 1 mps 1 mps 1 mps
T
xδ =− −](https://image.slidesharecdn.com/aas03-113-140321092522-phpapp01/75/Control-Strategies-For-Formation-Flight-In-The-Vicinity-Of-The-Libration-Points-12-2048.jpg)
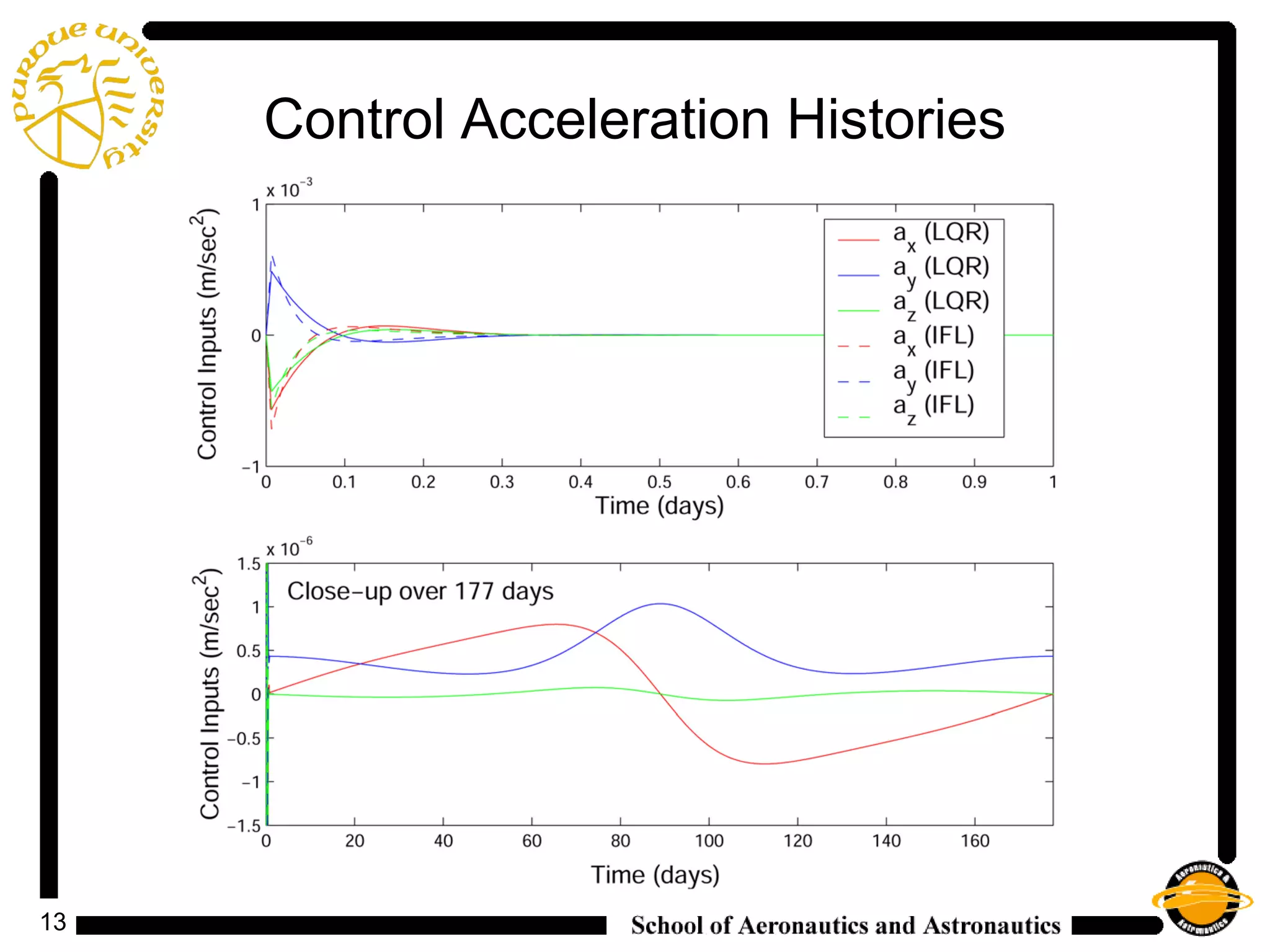

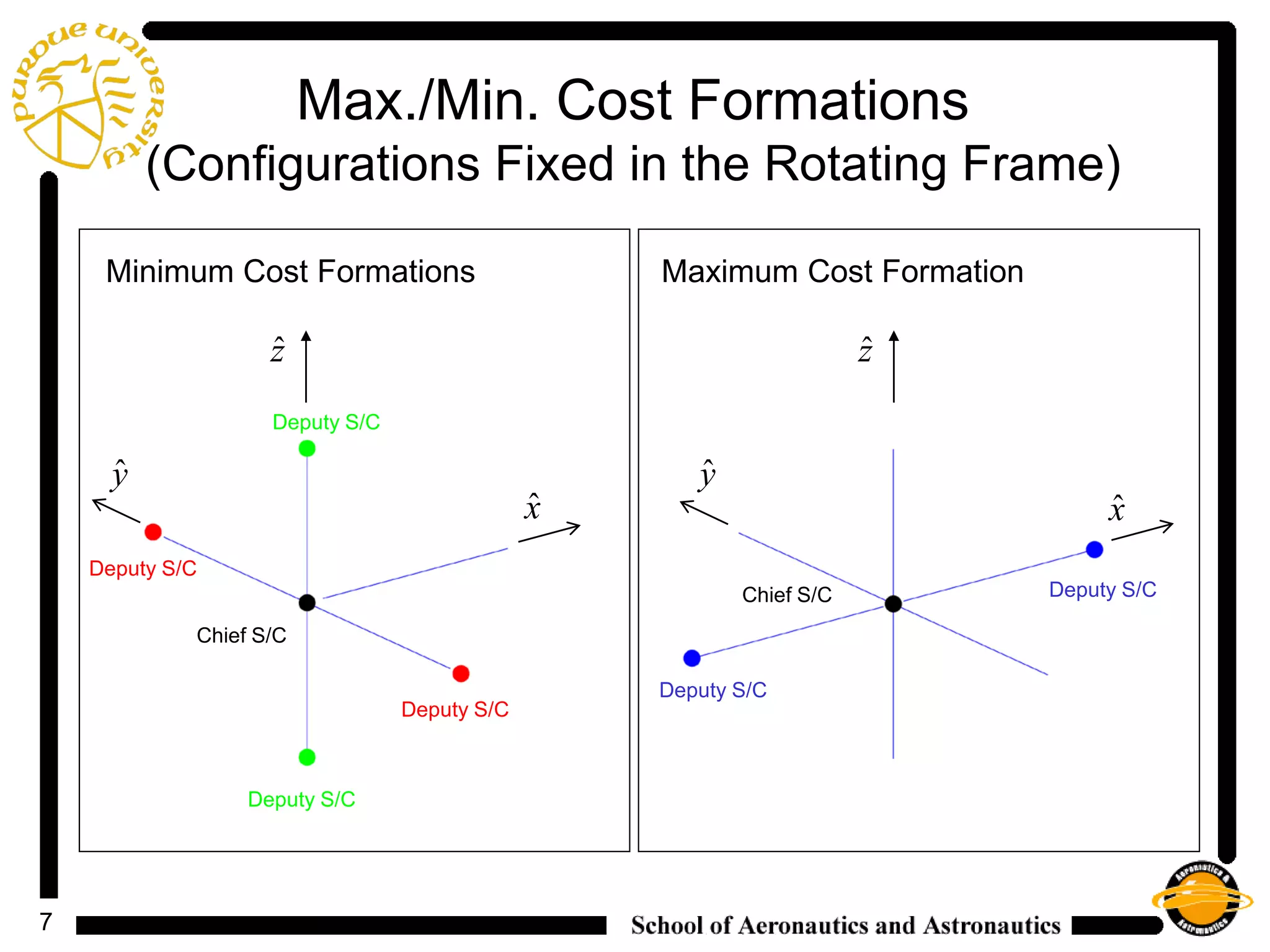
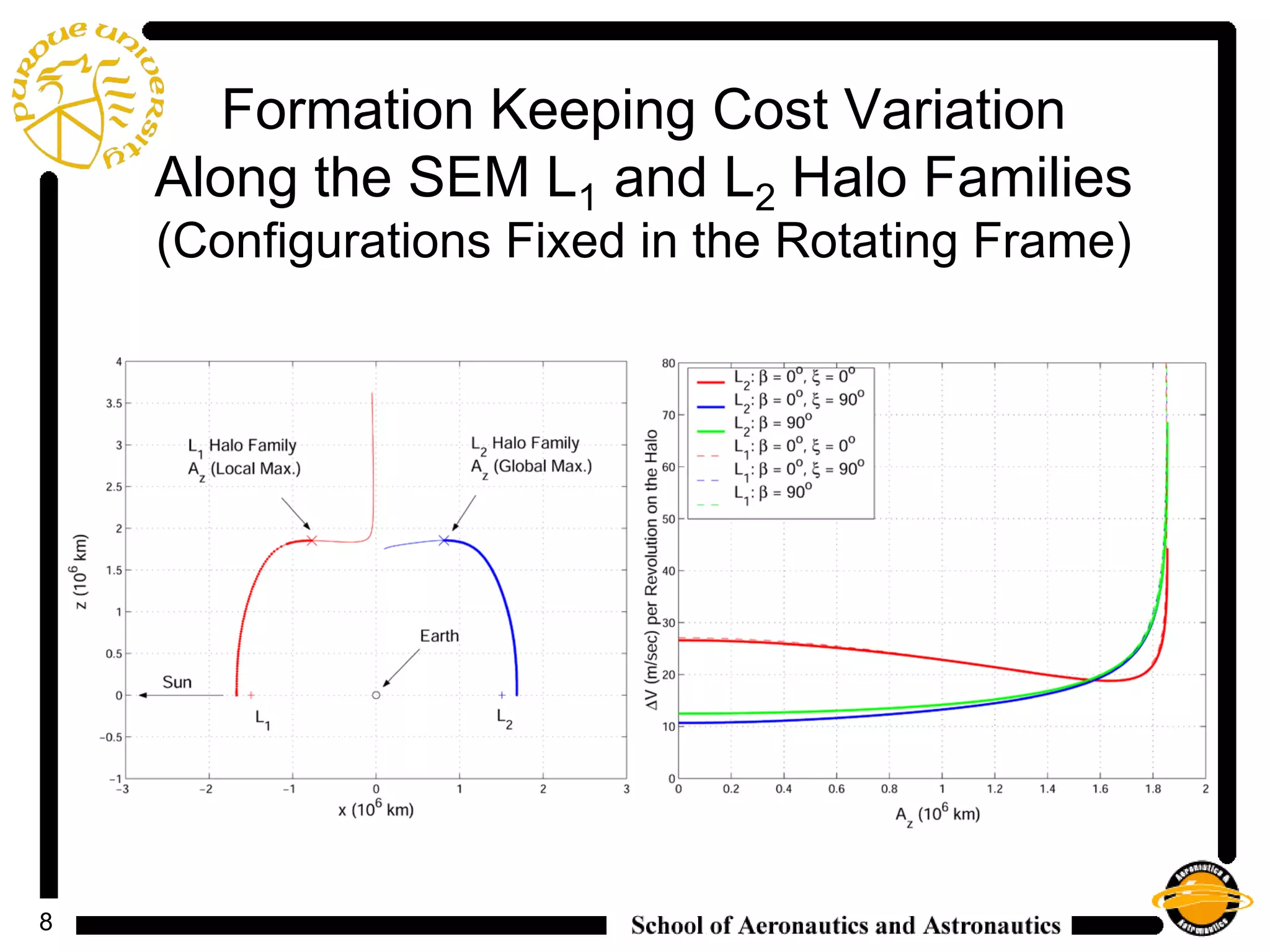
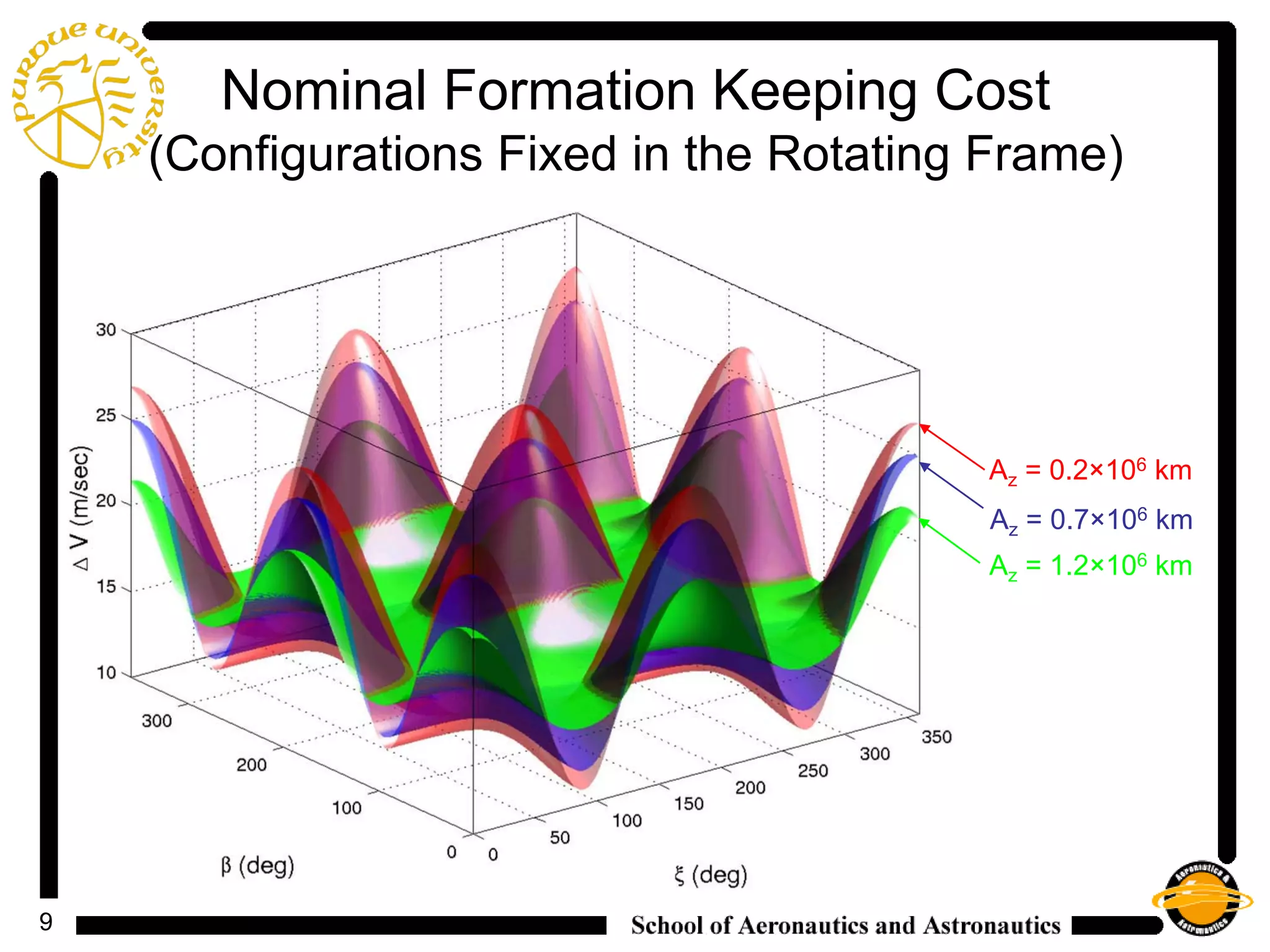
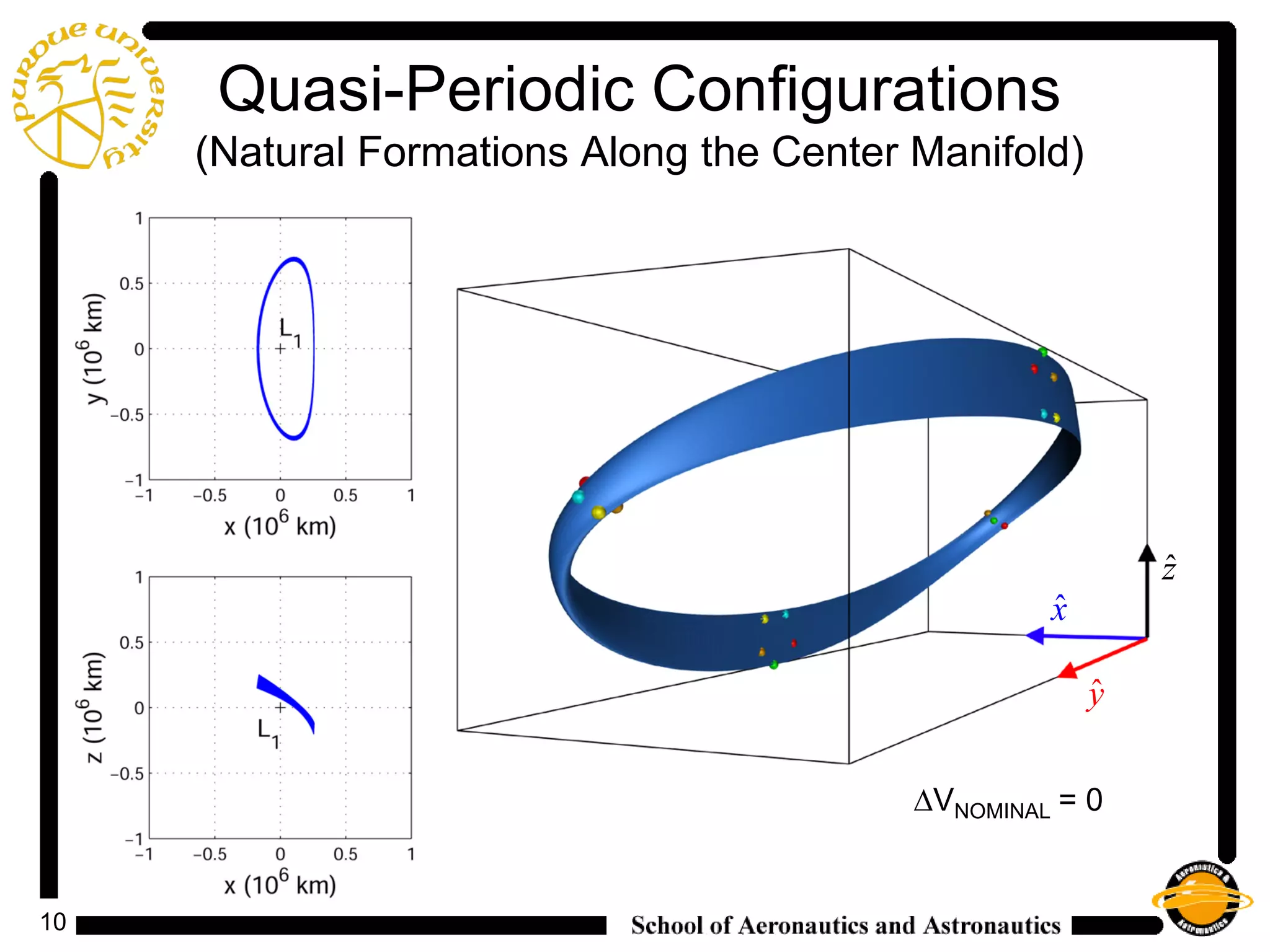
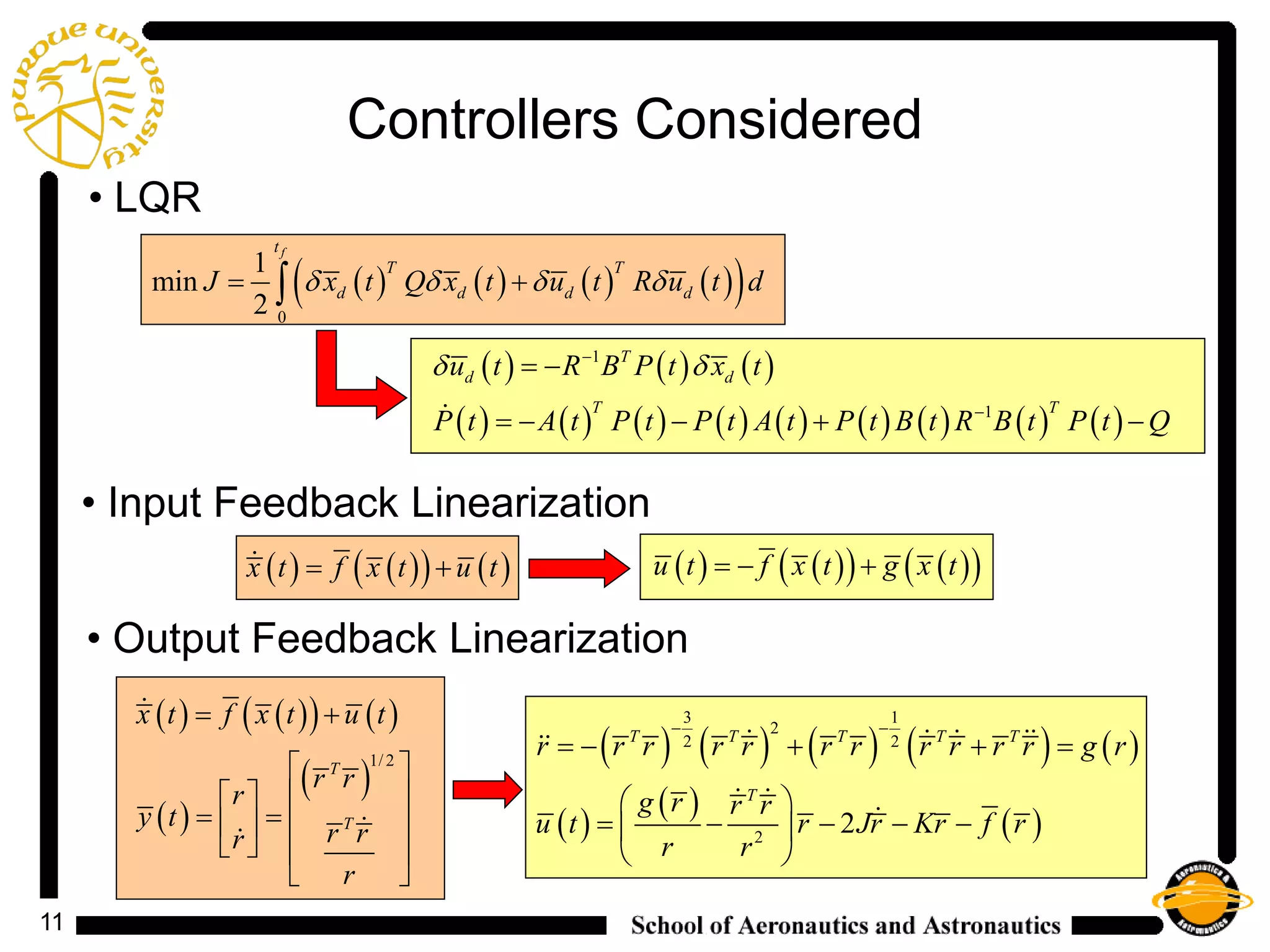
1) The document discusses control strategies for maintaining spacecraft formations near libration points using linear quadratic regulator (LQR) and input feedback linearization (IFL) controllers. 2) It analyzes the costs and control histories for formations with different configurations fixed in the rotating frame, finding that natural formations have very low nominal costs and that LQR and IFL controllers effectively stabilize formations above this nominal cost. 3) While control accelerations required are extremely low, complexity increases when transferring the results to an ephemeris model that includes additional sources of error and uncertainty.