Download to read offline

![Related works
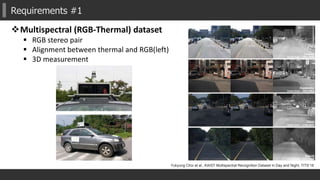
Single image based depth estimation
Supervised depth estimation
Unsupervised depth estimation
Semi-supervised depth estimation
Supervised depth estimation
Supervised [NIPS’14, CVPR’15, ICCV’15, NIPS’16, PAMI’16]
Semi-supervised [CVPR’17]
Unsupervised [ECCV’16, 3DV’16, CVPR’17]
Unsupervised depth estimation
Semi-supervised depth estimation](https://image.slidesharecdn.com/aaai2018slideshare-180221124140/85/AAAI2018-Multispectral-Transfer-Network-Unsupervised-Depth-Estimation-for-All-day-Vision-5-320.jpg)

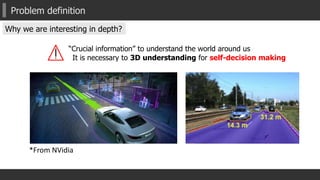
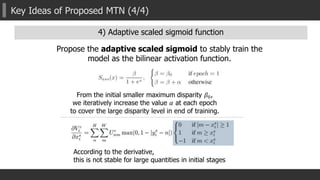
![Key Ideas of Proposed MTN (2/4)
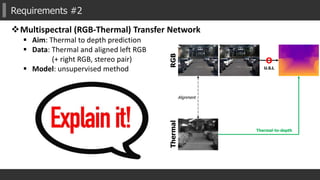
2) Novel Module for Multi-task learning
1. Global/Un-Pooling + L2 Norm.
Enlarge receptive field [ParseNet] + feature transformation
2. Gating mechanism
Control the degree of the effectiveness of another task
to the main task. (especially in back-propagation).
3. Up-sampling and adding to previous output
Equipped in every skip-connected flows
(fully-connections between layers)](https://image.slidesharecdn.com/aaai2018slideshare-180221124140/85/AAAI2018-Multispectral-Transfer-Network-Unsupervised-Depth-Estimation-for-All-day-Vision-18-320.jpg)

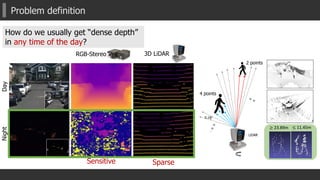
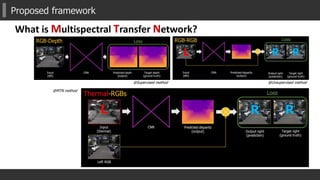
![Experimental results: Day
MTN
GT
ColorThermal
Single Task LsMTN DsMTN MTN-P DIW [NIPS’16]
Without
Binary error map (error > 3 pixels)
[Eigen, NIPS2014]
[DIW, NIPS2016]
Daytime
1~50m Methods
STN LsMTN DsMTN MTN-P MTN STN-RGB Eigen-RGB Eigen-T DIW-RGB DIW-T
Distance *Lower is better
RMS 7.7735 6.6967 6.3671 7.0058 6.0786 7.5876 10.1792 10.2660 6.4993 6.4427
Log RMS 0.2000 0.1801 0.1761 0.1951 0.1714 0.2094 0.2386 0.2384 0.1934 0.1967
Abs. Relative 0.1531 0.1325 0.1259 0.1413 0.1207 0.1570 0.1992 0.1976 0.1644 0.1697
Sq. Relative 2.2767 1.6322 1.4394 1.7251 1.3119 2.0618 4.0629 4.0835 1.8030 1.7543
Accuracy *Higher is better
δ<1.25 0.8060 0.8358 0.8407 0.8040 0.8451 0.7772 0.7551 0.7561 0.7956 0.7825
δ<1.252
0.9337 0.9492 0.9544 0.9440 0.9557 0.9378 0.8965 0.8947 0.9482 0.9454
δ<1.253
0.9776 0.9842 0.9855 0.9827 0.9868 0.9806 0.9612 0.9618 0.9842 0.9851](https://image.slidesharecdn.com/aaai2018slideshare-180221124140/85/AAAI2018-Multispectral-Transfer-Network-Unsupervised-Depth-Estimation-for-All-day-Vision-23-320.jpg)
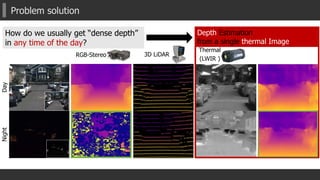
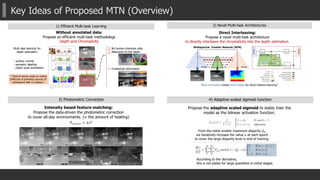
![Experimental results: Night
MTNSingle Task MTN-P DIW [NIPS’16]
Without
Nighttime
1~50m Methods
STN LsMTN DsMTN MTN-P MTN STN-RGB Eigen-RGB Eigen-T DIW-RGB DIW-T
Ordinal Accuracy *Higher is better
ξ<10 0.3233 0.3405 0.3745 0.3096 0.4666 0.2508 0.1728 0.2033 0.1404 0.3744
ξ<20 0.6237 0.6855 0.6820 0.6225 0.7026 0.3284 0.2442 0.6178 0.3176 0.7459
ξ<30 0.7317 0.7753 0.7797 0.7397 0.7757 0.3592 0.3064 0.7516 0.3805 0.8401
[Eigen, NIPS2014]
[DIW, NIPS2016]
GT
ColorThermal](https://image.slidesharecdn.com/aaai2018slideshare-180221124140/85/AAAI2018-Multispectral-Transfer-Network-Unsupervised-Depth-Estimation-for-All-day-Vision-24-320.jpg)
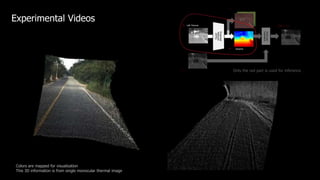
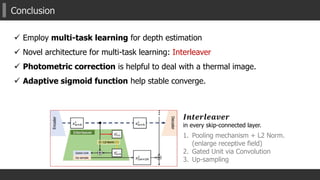


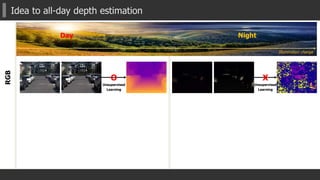
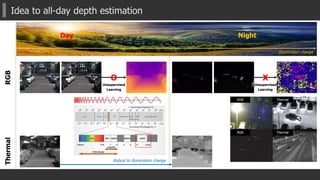
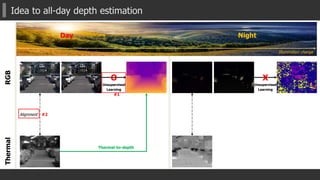
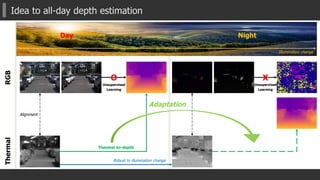
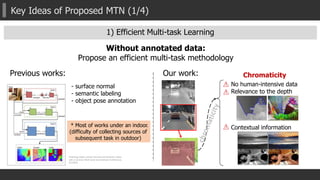
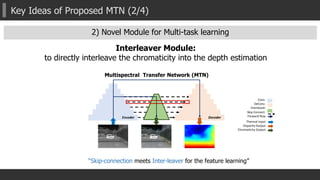
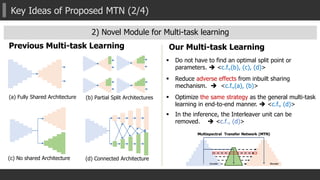
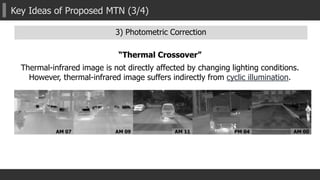
The document presents a multispectral transfer network (MTN) framework for unsupervised depth estimation applicable at all times of the day, addressing the challenges posed by varying illumination conditions. It proposes an efficient multi-task learning approach that predicts depth, surface normals, and semantic labels using a common multi-scale convolutional architecture, incorporating novel mechanisms like an interleaver module and adaptive scaling for robust performance. Experimental results indicate the effectiveness of MTN over existing methods in both day and night scenarios, demonstrating improvements in depth estimation accuracy.











![[Seminar arxiv]fake face detection via adaptive residuals extraction network](https://cdn.slidesharecdn.com/ss_thumbnails/seminararxivfakefacedetectionviaadaptiveresidualsextractionnetwork-210521190205-thumbnail.jpg?width=640&height=640&fit=bounds)




























![[Slides] Using deep recurrent neural network for direct beam solar irradiance...](https://cdn.slidesharecdn.com/ss_thumbnails/csdnnspie10405-2chen20170807v3d1-170908013001-thumbnail.jpg?width=640&height=640&fit=bounds)

























