Download to read offline







![AN1199
OW_read_byte
Reads the 8-bit information from the 1-Wire slave device.
Syntax
unsigned char OW_read_byte (void)
Parameters
None
Return Values
Returns the read byte from the slave device.
Precondition
None
Side Effects
None
Example
// To receive 64-bit registration number ( 8-bit CRC Code, 48-bit Serial
//Number, 8-bit family code) from the 1-Wire slave device.
unsigned char serial_number [8];
unsigned char temp;
for(temp = 0; temp<8; temp++)
serial_number[temp] = OW_read_byte();
© 2008 Microchip Technology Inc.
DS01199A-page 9](https://image.slidesharecdn.com/1wireprotocol-131206134101-phpapp02/85/1wire-protocol-9-320.jpg)








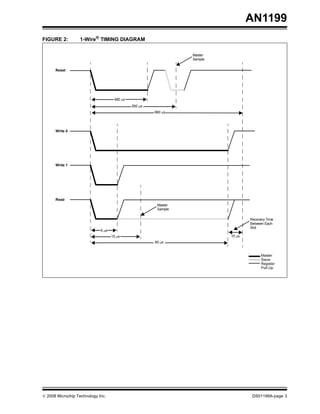
The document describes how to interface a 1-Wire device to a PIC microcontroller and provides an overview of the 1-Wire communication protocol. It explains the basic operations of reset, write 0 bit, write 1 bit, and read bit. It also provides code examples for 1-Wire functions to initialize communication and transfer data. The 1-Wire protocol uses a single data line with defined timing to communicate between a master and slave device.















































![Communication_Protocols[2][1].pptx on protocoals](https://cdn.slidesharecdn.com/ss_thumbnails/communicationprotocols21-250429164707-38355411-thumbnail.jpg?width=640&height=640&fit=bounds)