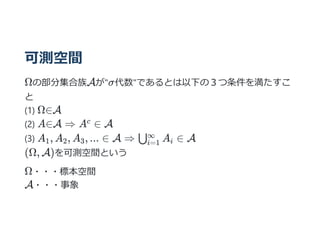
測度
関数μ : A→ [0, ∞] が測度であるとは
(1)μ(ϕ) = 0
(2)互いにそな⾼々加算個の集合A .., A ... ∈ Aに対して
μ( A ) = Σ μ(A )
この時(Ω, A, μ)を測度空間という。
μ(Ω) = 1の場合 μを確率測度という。
1 n
i=1
⋃
n
i i=1
n
i
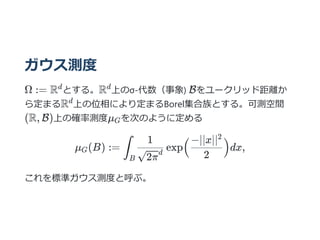
ガウス測度
Ω := Rとする。R 上のσ-代数(事象) Bをユークリッド距離か
ら定まるR 上の位相により定まるBorel集合族とする。可測空間
(R, B)上の確率測度μ を次のように定める
μ (B) := exp dx,
これを標準ガウス測度と呼ぶ。
d d
d
G
G ∫
B √2π
d
1
(
2
−∣∣x∣∣2
)
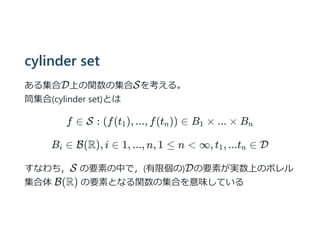
cylinder set
ある集合D上の関数の集合Sを考える。
筒集合(cylinder set)とは
f∈ S : (f(t ), ..., f(t )) ∈ B × ... × B
B ∈ B(R), i ∈ 1, ..., n, 1 ≤ n < ∞, t , ...t ∈ D
すなわち,S の要素の中で,(有限個の)Dの要素が実数上のボレル
集合体 B(R) の要素となる関数の集合を意味している
1 n 1 n
i 1 n
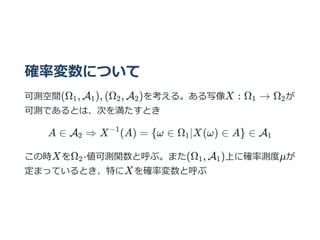
ガウス過程の定義
確率空間(Ω, A, μ)から測度空間(R , C(T))への確率変数ζがガ
ウス過程であるとは、それによってい誘導されるR 上の確率分布
μ が次の条件を満たすときに⾔う︓
任意の有限個のTの元t , ..., t を取ってきた時に定まる確率変数
(t , ..., t ) : R → R , f → (f(t ), ..., f(t ))
が定めるR 上の確率分布が必ずガウス測度となる
T
T
ζ
1 n
1 n
T n
1 n
n
32.
すなわちガウス過程とは
In terms ofmeasures: Consider the space R of all real-valued
functions on T. A subset of the form
{f : f(t ) ∈ A , 1 ≤ i ≤ n} for some n ≥ 1, t ∈ T and some
Borel sets A ⊆ R is called a cylinder set. Let G be the
sigma-algebra generated by all cylinder sets. Equivalently, we may
consider the product topology on R
(by definition the smallest topology that makes the projection maps
Πt , ..., t (f) = (f(t ), ..., f(t )) from R to
R continuous) and define G as the Borel sigma-algebra of this
topology.
T
i i i
i
T
1 n 1 n
T
n
33.
すなわちガウス過程とは
Then, a measureμ on (R , G) is called a Gaussian measure if for
every n ≥ 1 an and every t1,...,tn ∈ T, the
push-forward measure µ◦Π−1
t1, ..., tn on R is a Gaussian measure (with some mean vector
and some covariance
matrix).
T
n
![測度
関数μ : A → [0, ∞] が測度であるとは
(1)μ(ϕ) = 0
(2)互いにそな⾼々加算個の集合A .., A ... ∈ Aに対して
μ( A ) = Σ μ(A )
この時(Ω, A, μ)を測度空間という。
μ(Ω) = 1の場合 μを確率測度という。
1 n
i=1
⋃
n
i i=1
n
i](https://image.slidesharecdn.com/untitled-180329142900/85/slide-11-320.jpg)











![[研究室論文紹介用スライド] Adversarial Contrastive Estimation](https://cdn.slidesharecdn.com/ss_thumbnails/acepub-181119101425-thumbnail.jpg?width=640&height=640&fit=bounds)




































![[PRML] パターン認識と機械学習(第2章:確率分布)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter2-171002030018-thumbnail.jpg?width=640&height=640&fit=bounds)