Recommended
PDF
PDF
PDF
PDF
PDF
PDF
Japan Robot Week 2014けいはんなロボットフォーラム
PDF
20151129インテリジェントホームロボティクス研究会
PDF
PDF
ICML2013読み会 ELLA: An Efficient Lifelong Learning Algorithm
PDF
PDF
PDF
PDF
PDF
PDF
Twitter分析のためのリアルタイム分析基盤@第4回Twitter研究会
PDF
Jubatusの紹介@第6回さくさくテキストマイニング
PDF
Jubatusにおける大規模分散オンライン機械学習
PDF
PDF
情報抽出入門 〜非構造化データを構造化させる技術〜
PDF
Jubatusのリアルタイム分散レコメンデーション@TokyoWebmining#17
PDF
Connecting embedding for knowledge graph entity typing
PDF
第四回 全日本CV勉強会スライド(MOTS: Multi-Object Tracking and Segmentation)
PDF
NIPS2013読み会: Distributed Representations of Words and Phrases and their Compo...
PPTX
PDF
Deep learning for acoustic modeling in parametric speech generation
PDF
segmentation-modelsでざっくり動かすセマンティックセグメンテーション(U-Net)
PDF
Dataset cartography mapping and diagnosing datasets with training dynamics
PDF
Jubatusのリアルタイム分散レコメンデーション@TokyoNLP#9
PDF
ビッグデータで開扉されるイノベーション社会
PDF
人間とのインタラクションにより言葉と行動を学習するロボット, 岩橋直人
More Related Content
PDF
PDF
PDF
PDF
PDF
PDF
Japan Robot Week 2014けいはんなロボットフォーラム
PDF
20151129インテリジェントホームロボティクス研究会
PDF
What's hot
PDF
ICML2013読み会 ELLA: An Efficient Lifelong Learning Algorithm
PDF
PDF
PDF
PDF
PDF
PDF
Twitter分析のためのリアルタイム分析基盤@第4回Twitter研究会
PDF
Jubatusの紹介@第6回さくさくテキストマイニング
PDF
Jubatusにおける大規模分散オンライン機械学習
PDF
PDF
情報抽出入門 〜非構造化データを構造化させる技術〜
PDF
Jubatusのリアルタイム分散レコメンデーション@TokyoWebmining#17
PDF
Connecting embedding for knowledge graph entity typing
PDF
第四回 全日本CV勉強会スライド(MOTS: Multi-Object Tracking and Segmentation)
PDF
NIPS2013読み会: Distributed Representations of Words and Phrases and their Compo...
PPTX
PDF
Deep learning for acoustic modeling in parametric speech generation
PDF
segmentation-modelsでざっくり動かすセマンティックセグメンテーション(U-Net)
PDF
Dataset cartography mapping and diagnosing datasets with training dynamics
PDF
Jubatusのリアルタイム分散レコメンデーション@TokyoNLP#9
Similar to ロボットの音声コミュニケーション技術:言葉や能力の壁を越えるデータ指向知能に向けて
PDF
ビッグデータで開扉されるイノベーション社会
PDF
人間とのインタラクションにより言葉と行動を学習するロボット, 岩橋直人
PDF
記号を用いたコミュニケーションを実現するために何が必要か?― 記号創発ロボティクスの 視点から ―
PDF
PDF
人間とのインタラクションにより言葉と行動を学習するロボット(岩橋 直人)
PDF
PDF
人間との協調を学ぶ人工知能 岩橋直人 Artificial intelligence that learns to cooperate with huma...
PPTX
地域ニーズに沿ったAI活用への挑戦〜株式会社エルブズによる社会性エージェントサービス〜
PDF
PDF
PDF
PDF
PDF
#ibis2017 Description: IBIS2017の企画セッションでの発表資料
PDF
MAごころを、君に - #7 ChatGPT勉強会(2023-03-28)
PPTX
PDF
人工知能技術の現状-今後の見通し-社会へのインパクト-岡夏樹
PPTX
Google’s New AI Is Trying to Talk to Dolphin
PDF
ロボットによる言語獲得とインタラクション ~ロボットの”gaga to water”~(長井隆行)
PDF
PDF
[Whisper論文紹介]Robust Speech Recognition via Large-Scale Weak Supervision
More from Komei Sugiura
PDF
生活支援ロボットにおける�大規模データ収集に向けて
PDF
SuMo-SS: Submodular Optimization Sensor Scattering for Deploying Sensor Netwo...
PDF
Spatio-Temporal Pseudo Relevance Feedback for Large-Scale and Heterogeneous S...
PDF
PDF
New challenge in RoboCup 2017 Nagoya: RoboCup@Home Standard Platform
PDF
20160606劣モジュラ性を利用したドローンによるばらまき型センサ配置
PDF
20160221statistic imitation learning and human-robot communication
PDF
20140513大規模異分野データ横断検索における時空間情報を用いた擬似適合性フィードバック
PDF
20150531Deep Recurrent Neural Networkによる環境モニタリングデータの予測
PDF
階層型評価構造に基づく観光スポット推薦システムの構築と長期実証実験
PDF
Cloud Robotics for Human-Robot Dialogues
PDF
Language acquisition framework for robots: From grounded language acquisition...
PDF
rospeex: a cloud-based speech communication toolkit for ROS
PDF
Introduction to RoboCup@Home
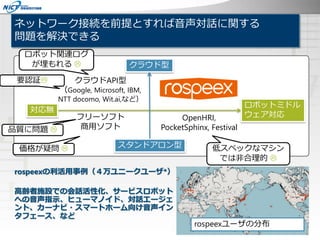
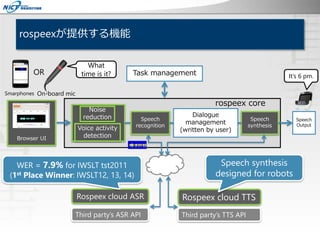
ロボットの音声コミュニケーション技術:言葉や能力の壁を越えるデータ指向知能に向けて 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. rospeexが提供する機能
rospeex core
Dialogue
management
(written by user)
Speech
synthesis
Speech
Output
Speech
recognition
Rospeex cloud TTS
Noise
reduction
Voice activity
detection
Third party’s ASR API
Browser UI
OR
Smarphones On-board mic
Task management
Rospeex cloud ASR
What
time is it? It’s 6 pm.
Third party’s TTS API
Speech synthesis
designed for robots
WER = 7.9% for IWSLT tst2011
(1st Place Winner: IWSLT12, 13, 14)
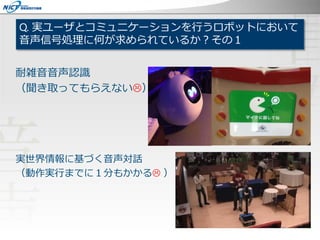
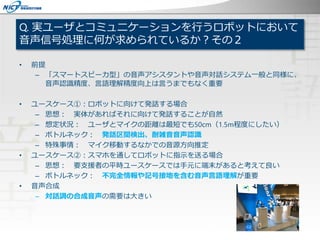
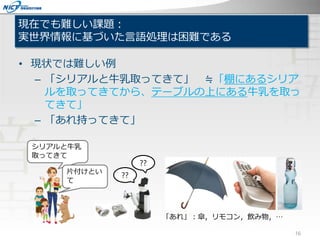
12. 13. 14. 15. Q. 実ユーザとコミュニケーションを行うロボットにおいて
音声信号処理に何が求められているか?その2
• 前提
– 「スマートスピーカ型」の音声アシスタントや音声対話システム一般と同様に、
音声認識精度、言語理解精度向上は言うまでもなく重要
• ユースケース①:ロボットに向けて発話する場合
– 思想: 実体があればそれに向けて発話することが自然
– 想定状況: ユーザとマイクの距離は最短でも50cm(1.5m程度にしたい)
– ボトルネック: 発話区間検出、耐雑音音声認識
– 特殊事情: マイク移動するなかでの音源方向推定
• ユースケース②:スマホを通してロボットに指示を送る場合
– 思想: 要支援者の平時ユースケースでは手元に端末があると考えて良い
– ボトルネック: 不完全情報や記号接地を含む音声言語理解が重要
• 音声合成
– 対話調の合成音声の需要は大きい
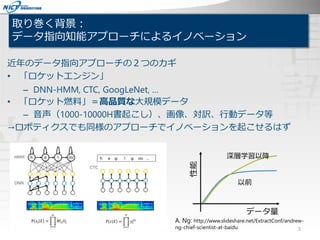
16. 17. 18. 予測軌道をどう求めるか?
模倣学習による記号接地の関連研究
手法 References
制御ベース Dynamic Motion Primitives [Ijspeert 2002]
ニューラルネット
&強化学習
• RNNPB [Sugita 2005, Ogata 2007]
• 深層強化学習[Levine 2015]
確率モデル • ガウス過程 [Lawrence 2004], ガウス回帰[Calinon 2010]
• 隠れマルコフモデル(HMM; Hidden Markov Model)
[Inamura 2004, Niwase 2005]
• 確率最適制御 [松原 2015]
HMMのメリット
• 学習、認識、生成に高速なアルゴリズムが整備
されている
模倣学習 ≒ 動作学習+動作認識+動作生成
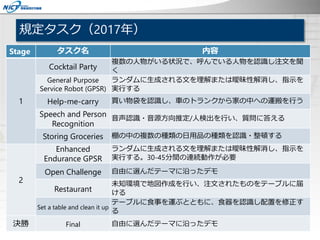
19. 20. 21. 22. 23. 24. 25. 26. 規定タスク(2017年)
Stage タスク名 内容
1
Cocktail Party
複数の人物がいる状況で、呼んでいる人物を認識し注文を聞
く
General Purpose
Service Robot (GPSR)
ランダムに生成される文を理解または曖昧性解消し、指示を
実行する
Help-me-carry 買い物袋を認識し、車のトランクから家の中への運搬を行う
Speech and Person
Recognition
音声認識・音源方向推定/人検出を行い、質問に答える
Storing Groceries 棚の中の複数の種類の日用品の種類を認識・整頓する
2
Enhanced
Endurance GPSR
ランダムに生成される文を理解または曖昧性解消し、指示を
実行する。30-45分間の連続動作が必要
Open Challenge 自由に選んだテーマに沿ったデモ
Restaurant
未知環境で地図作成を行い、注文されたものをテーブルに届
ける
Set a table and clean it up
テーブルに食事を運ぶとともに、食器を認識し配置を修正す
る
決勝 Final 自由に選んだテーマに沿ったデモ
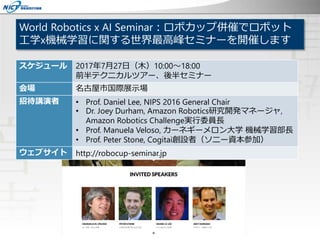
27. 28. 29. World Robotics x AI Seminar:ロボカップ併催でロボット
工学x機械学習に関する世界最高峰セミナーを開催します
会期
2017年7月27日(木)10:00~18:00
10:00~14:30 テクニカルツアー、15:00~18:00 セミナー
会場:名古屋市国際展示場
招待講演者
• Prof. Daniel Lee, NIPS 2016 General Chair
• Dr. Joey Durham, Amazon Robotics研究開発マネージャ, Amazon Robotics
Challenge実行委員長
• Prof. Manuela Veloso, カーネギーメロン大学 機械学習部長
• Prof. Peter Stone, Cogitai創設者(ソニー資本参加)
スケジュール 2017年7月27日(木)10:00~18:00
前半テクニカルツアー、後半セミナー
会場 名古屋市国際展示場
招待講演者 • Prof. Daniel Lee, NIPS 2016 General Chair
• Dr. Joey Durham, Amazon Robotics研究開発マネージャ,
Amazon Robotics Challenge実行委員長
• Prof. Manuela Veloso, カーネギーメロン大学 機械学習部長
• Prof. Peter Stone, Cogitai創設者(ソニー資本参加)
ウェブサイト http://robocup-seminar.jp
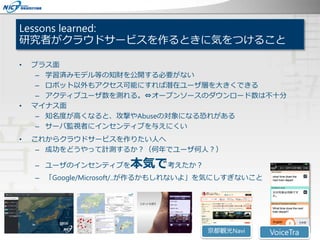
30. 31. 32. 33. Lessons learned:
研究者がクラウドサービスを作るときに気をつけること
• プラス面
– 学習済みモデル等の知財を公開する必要がない
– ロボット以外もアクセス可能にすれば潜在ユーザ層を大きくできる
– アクティブユーザ数を測れる。⇔オープンソースのダウンロード数は不十分
• マイナス面
– 知名度が高くなると、攻撃やAbuseの対象になる恐れがある
– サーバ監視者にインセンティブを与えにくい
• これからクラウドサービスを作りたい人へ
– 成功をどうやって計測するか?(何年でユーザ何人?)
– ユーザのインセンティブを本気で考えたか?
– 「Google/Microsoft/..が作るかもしれないよ」を気にしすぎないこと
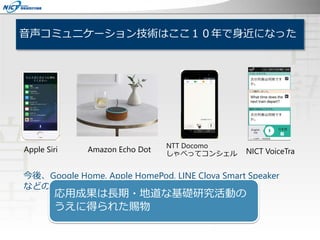
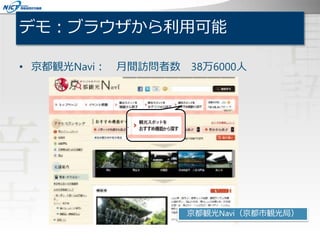
VoiceTra京都観光Navi
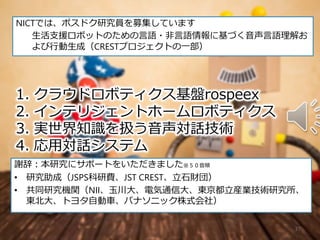
34. 35. 36. 37. 37
1. クラウドロボティクス基盤rospeex
2. インテリジェントホームロボティクス
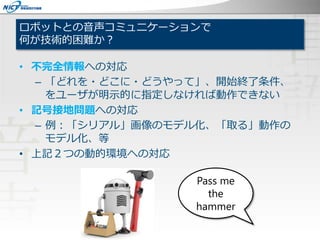
3. 実世界知識を扱う音声対話技術
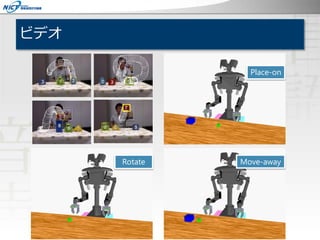
4. 応用対話システム
謝辞:本研究にサポートをいただきました※50音順
• 研究助成(JSPS科研費、JST CREST、立石財団)
• 共同研究機関(NII、玉川大、電気通信大、東京都立産業技術研究所、
東北大、トヨタ自動車、パナソニック株式会社)
NICTでは、ポスドク研究員を募集しています
生活支援ロボットのための言語・非言語情報に基づく音声言語理解お
よび行動生成(CRESTプロジェクトの一部)



![Rospeex:多言語音声対話のためのクラウドロボティクス基盤*
• 4万ユニークユーザ
• ロボット向けに特化した音声合成 [Sugiura+ 2014]
• 多言語の音声認識および合成
Python & C++のサンプ
ルを公開中
rospeex Search
* 研究開発目的の利用に限る](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-9-320.jpg)
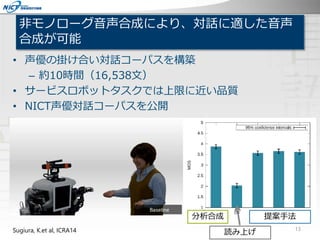
![「NICT声優対話コーパス」を公開しました(2016/6)
• 規模:14,179発話
– 日本語音声合成用コーパスとして世界最大級の公開コーパス
• 利用例
– 非モノローグ音声合成[Sugiura, ICRA14], 文選択[Nose,
Interspeech15]
• ALAGIN会員は無料でダウンロード可
– ALAGIN会員=大学関係者は無料、企業は有料
NICT声優対話コーパス Search
●書き起こしファイル
例: だいたい予算が三千円ぐらいになるんです。
それから店構えがこのようなものなんですけれども。
●自動生成した読み
例:ダイタイ ヨサンガ サンゼンエング'ライニ ナ'ルンデス
ソレカラ ミセガ'マエガ コノヨ'ーナモノ'ナンデスケレドモ](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-12-320.jpg)
![予測軌道をどう求めるか?
模倣学習による記号接地の関連研究
手法 References
制御ベース Dynamic Motion Primitives [Ijspeert 2002]
ニューラルネット
&強化学習
• RNNPB [Sugita 2005, Ogata 2007]
• 深層強化学習[Levine 2015]
確率モデル • ガウス過程 [Lawrence 2004], ガウス回帰[Calinon 2010]
• 隠れマルコフモデル(HMM; Hidden Markov Model)
[Inamura 2004, Niwase 2005]
• 確率最適制御 [松原 2015]
HMMのメリット
• 学習、認識、生成に高速なアルゴリズムが整備
されている
模倣学習 ≒ 動作学習+動作認識+動作生成](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-18-320.jpg)
![物体操作の模倣学習[Sugiura+ 2007, 2011]
• 難しさ: 世界座標系における軌道のクラスタリングは有効でない
• 提案手法
– 入力: 全オブジェクトの位置時系列
– EMアルゴリズムによる参照点・座標系の推定
– cross-validationによる状態数の推定
“AをBにのせる”
19](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-19-320.jpg)
![参照点に依存したHMMによる模倣学習
[Sugiura+ 07][Sugiura+ 11]
デルタパラメータの物理的意味
=速度・加速度の2次精度中心差分近似
: 時刻 tにおける位置
最尤の座標系の探索
参照オブジェクトID
HMM
パラメータ
座標系タイプ
* Sugiura, K. et al, “Learning, Recognition, and Generation of Motion by …”, Advanced Robotics, Vol.25, No.17, 2011
: 位置・速度・加速度の時系列
特徴量
AをBにのせる](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-20-320.jpg)
![[Tokuda 2000]の手法で音声と同様に動作軌道生成が可能
最尤軌道生成: 位置・速度・加速度の時系列
AをBにのせる
: 差分近似係数の行列
*Tokuda, K. et al, “Speech parameter generation algorithms for HMM-based speech synthesis”, 2000](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-21-320.jpg)
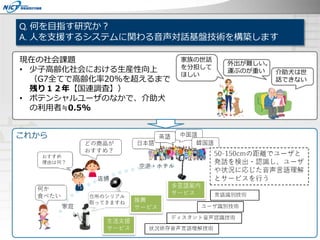
![少子高齢化社会における生活支援ロボット
これから
ホームロボットによる生活支援
およびQoL向上
現在、介助犬が担っているタス
クをロボットが分担
(現状の介助犬ユーザ≒ポテン
シャルユーザの0.5%)
【背景】あと12年で主要7ヶ国(G7)全
てで高齢化率が20%を超える [総務省]
社会課題:少子高齢化
家族の世話
を分担して
ほしい
簡単なことは人
に頼みにくい…
介助犬は世
話できない
2030
片付けてお
きます
何をとってきま
しょうか?
いつもの洗剤、
なくなりそうで
すよ。
※介助犬育成費用は1頭300万円以上](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-24-320.jpg)



![観光スポット探しに必要な労力を削減する[杉浦+ 2014]
京のおすすめ(2011)
• 提案手法
– 「癒されたい」などの曖昧な嗜好に合うスポットを推薦(重みつ
きナイーブベイズモデル)
– 評価グリッド法による嗜好の構造化・定量化
• 社会展開
– スマートホンアプリ(2011年公開)、京都市観光局のウェブサ
イト(月間訪問者386,000)へのアルゴリズムの導入
対話システムHANNA
(2011)](https://image.slidesharecdn.com/20170618pub-170618001553/85/slide-31-320.jpg)













































![[Whisper論文紹介]Robust Speech Recognition via Large-Scale Weak Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/whisper-250612044133-e22fcae0-thumbnail.jpg?width=640&height=640&fit=bounds)













