795.роторные рабочие органы лесохозяйственных машин механика взаимодействия с предметом труда монография
1. Министерство образования и науки Российской Федерации
ГОУ ВПО
СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ
УНИВЕРСИТЕТ
Коршун В.Н.
РОТОРНЫЕ РАБОЧИЕ ОРГАНЫ
ЛЕСОХОЗЯЙСТВЕННЫХ МАШИН
механика взаимодействия
с предметом труда
Утверждено редакционно-издательским
советом СибГТУ в качестве монографии
Красноярск 2005
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
3. 3
Содержание
Введение ………………………………………………………………5
1 Основы механики взаимодействия рабочих органов
с предметом труда ……………………………………….….……10
1.1 Схематизация взаимодействия рабочих органов с предметом труда
и опорной поверхностью ……………………………………….………..10
1.2 Кинематика взаимодействия рабочих органов с предметом труда...14
1.3 Оптимизация кинематики взаимодействия ………………………..…22
1.3.1 Оптимизация кинематики горизонтального ротора …………...…....22
1.3.2 Оптимизация кинематических параметров вертикального ротора ..32
1.3.3 Оптимизация кинематики обратно вращающегося ротора ……...…37
1.4 Анализ динамики взаимодействия …………………...………………...43
1.4.1 Определение нагрузок на основе методов классической механики .44
1.4.2 Моделирование динамики процесса измельчения ………………….47
1.4.3 Численно-аналитическое исследование нагрузок ………………..…52
1.4.4 Исследование влияния конструктивных факторов на параметры
динамики ………………………………………………………………63
1.5 Экспериментальное определение параметров взаимодействия …....71
1.6 Выводы по разделу ……………………………………………......…...…76
2 Основы механика лесной почвы …………………….........……77
2.1 Классификация предмета труда ……………………………………..…77
2.2 Лесная почва как механический предмет труда и среда
движения машин …………………………………………...…………..78
2.2.1 Вертикальная структура лесной почвы ………………………………79
2.2.2 Горизонтальная структура лесной почвы …………………………....83
2.3 Механические свойства минерального основания лесных почв ....87
2.3.1 Физические свойства минерального основания лесных почв …...…93
2.3.2 Механические свойства лесных почв ………………………………..97
2.4 Механические свойства лесных почв, подвергнувшихся техногенному
и антропогенному воздействию ……………………..101
2.5 Исследование механических включений в лесных почвах ……....104
2.5.1 Структура и прочностные свойства подземных включений …..…104
2.5.2 Структура и параметры напочвенных включений ………………..109
2.5.3 Структура и параметры единичных включений …………………..112
2.6 Выводы ……………………………………………………..……………115
3 Математическое и компьютерное моделирование механики
взаимодействия с предметом труда и опорной поверхностью.117
3.1 Моделирование взаимодействия с лесной почвой ……………….…118
3.2 Моделирование свойств лесной подстилки …………………..……...126
3.2.1 Прогнозирование толщины подстилки ………………………...…...127
3.2.2 Моделирование деформирования подстилки ………………………132
3.2.3 Моделирование плотности подстилки при сжатии ………………..134
3.2.4 Моделирование плотности при сдвиге ……………………………..135
3.3 Методика прогнозирования параметров лесной почвы ………...…137
3.4 Моделирование опорной реакции ротора ……………………...….....139
3.5 Моделирование тяговой реакции ротора ………....................…….....143
3.6 Вывод …………………………………………………………………...…147
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
4. 4
4 Реологическая механика взаимодействия с
предметом труда…....................................................................…148
4.1 Исследование динамики измельчения ……………………………..…148
4.1.1 Структурные модели измельчаемого материала ……………..……149
4.2 Реологическое моделирование процесса измельчения ………….….157
4.3 Результаты моделирования…………………...………………………..167
4.4 Выводы ………………………………………………………………...….168
5 Экспериментальная механика взаимодействия ………...…..169
5.1 Исследование физико-механических и технологических свойств
опавших листьев …………………………………………………...……169
5.2 Компьютерная методика исследования свойств измельчаемого
материала ………………………………………………......……………177
5.2.1 Общее описание методики …………………………………..………178
5.2.2 Вычислительный алгоритм для AutoCAD ………………………….180
5.2.3 Программа расчета площади (на языке AutoLISP) ……………...…183
5.2.4 Результаты исследований по компьютерной методике …………...184
5.3 Оценка качества измельчения растительных материалов
роторными рабочими органами ……………………………...….........186
5.4 Экспериментальные исследования механических характеристик
опавших листьев и хвои …………………………………………….....191
5.4.1 Методика определения механических свойств …………………….192
5.4.2 Описание установки для испытаний ………………………………..194
5.5 Результаты экспериментальных исследований …………………….201
5.5.1 Прочностные параметры материалов ………………………...…….201
5.5.2 Параметры анизотропии ……………………………………………..206
5.5.3 Параметры демпфирования ………………………………………….209
5.5.4 Исследование импульсных нагрузок ................................................213
5.6 Исследование колебаний шарнирных ножей ......................................215
5.6.1 Экспериментальное определение нагрузок .......................................215
5.6.2 Компьютерный анализ результатов исследований ...........................220
5.7 Выводы ……………………………………………………………………224
6 Оценка энергоемкости взаимодействия ………………..…..225
6.1Теоретические исследования энергоемкости измельчения ………...226
6.1.1 Работа деформаций ………………………………………………......226
6.1.2 Мощность деформаций …………………………………………...…227
6.2 Исследование энергоемкости измельчения на основе реологических
моделей ……………………………………………………………………228
6.3 Экспериментальные исследования энергоемкости измельчения ..234
6.3.1 Описание установки …………………………………………...…….234
6.3.2 Планирование экспериментальных исследований роторов …….....240
6.3.3 Анализ размерностей ………………………………………………...240
6.4 Оценка энергоемкости взаимодействия по эмпирическим
моделям ………………………………………………………………….. 247
6.5 Общие выводы по исследованию энергоемкости взаимодействия..253
6.6 Оптимизация энергоемкости взаимодействия …................................254
6.6.1 Аналитическая оптимизация энергоемкости ...................................254
6.6.2 Компьютерная оптимизация энергоемкости ....................................256
Заключение ……………………………………...…………………262
Библиографический список ………………….....………….……263
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
5. 5
Введение
Цель лесного хозяйства - постоянное обеспечение устойчивого разви-
тия лесов, лесного комплекса и биотехносферы в целом. Решать поставлен-
ную цель человеку помогают лесохозяйственные машины, которые совмест-
но с технологическими приемами и методами образуют процессы неистощи-
мого комплексного и рационального лесопользования. В настоящее время
принята парадигма, по которой лесное хозяйство и человек рассматриваются
как части единой экосистемы [1]. Федеральная программа развития лесного
хозяйства, намеченная к реализации к 2005 году, предусматривает комплекс
мероприятий, в частности, по внедрению новых технологий и технических
средств с учетом зарубежного опыта. Однако реализация программы в части
лесохозяйственного комплекса ставится под сомнение. Фактический износ
основного технологического оборудования в лесной промышленности в на-
стоящее время превышает 60 %. В указанной программе [1] машины распре-
деляются по возрастным группам: 1 – до 5 лет; 2 – от 5 до 10 лет; 3 – от 10 до
20 лет; 4 – от 20 лет и выше. Большинство единиц лесозаготовительного обо-
рудования приходится на 1 группу. Так, для трелевочных тракторов доля
машин 1 группы составляет 73 %, для погрузчиков – 70 %; для лесовозных
автопоездов – 69 %; для раскряжевочных установок – 37 %; для сушильных
агрегатов – 2 %; для деревообрабатывающих машин – 43 %. Анализ пока-
зывает, что в лесозаготовительной отрасли сохраняется опасная тенденция
ускоренного развития оборудования для первичной заготовки лесного сырья
с целью его реализации без глубокой переработки. Дорогостоящая и высоко-
производительная зарубежная техника приобретается, как правило, с целью
заготовки круглого леса. Однако лесозаготовительная отрасль в целом име-
ет шанс для интенсивного развития. Развитию лесохозяйственных машин в
федеральной программе уделено мало внимания, в то же время их износ су-
щественно превышает износ лесозаготовительных машин. В настоящее время
лесное хозяйство остается придатком лесозаготовительной отрасли.
Перспективы развития лесохозяйственной техники могут определять-
ся принципами создания техники и реформирования сельскохозяйственного
производства [2]. Принципы сельского и лесного хозяйства во многом совпа-
дают и, в частности предусматривают: 1. Сохранение оптимального соотно-
шения природных ресурсов; 2. Оптимизация соотношения площадей под
угодья; 3. Сохранение среды обитания флоры, фауны, людей; 4. Многофак-
торная адаптация растений в системе растение-почва-климат; 5. Гарантиро-
ванное воспроизводство природных ресурсов.
В области прогрессивной организации производства предусматрива-
ется реализация принципов адаптивного землепользования: 1) дифферен-
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
6. 6
циальное использование потенциала среды; 2) оптимизация севооборотов; 3)
экологичность производства; 4) ограничение антропогенной и техногенной
нагрузки на среду. Реализация принципов агроландшафтного земледелия и
адаптивного землепользования определяют требования в отношении всех
субъектов системы человек-общество-природа. Ориентация на сохранение
естественного оптимума соотношений природных ресурсов и площадей оп-
ределяет объем и виды работ, а также обуславливает региональные приори-
теты по производству определенной продукции с учетом особенностей ре-
гиона и рыночных потребностей. Реализация принципа гарантированного
воспроизводства природных ресурсов требует разработки машинных техно-
логий с сохранением природного баланса региона, перевода заготовки лесно-
го сырья за счет постепенных рубок и рубок ухода, развитие лесовосстанов-
ления. Принцип ограничения антропогенной нагрузки на среду требует от
конструкторов выбора оптимальных нагрузок машин на почву, при которых
не происходит нарушения экологического равновесия в природе.
Лесохозяйственные и сельскохозяйственные машин с пассивными ра-
бочими органами объективно требуют для технической реализации своих
преимуществ машинно-тракторных агрегатов, обладающих большой массой
и высоким техногенным воздействием на предмет труда и среду движения
машин. Лесохозяйственные машины с роторными рабочими органами, не-
смотря на повышенную энергоемкость, обладают большими возможностями
для адаптации к целям ведения сельского и лесного хозяйства, однако
предъявляют высокие требования к техническому уровню своего конструк-
тивного воплощения.
Роторные рабочие органы лесохозяйственных машин (РО) взаимодей-
ствуют с предметом труда, обладающим своей спецификой. Специфика
предмета труда заключается, прежде всего, в гигантском разнообразии физи-
ко-механических, технологических, биологических, химических, агротехни-
ческих и других свойств. Эти свойства, как правило, носят анизотропный
характер, оцениваются случайными параметрами; перемены во времени, су-
щественно зависят от места расположения предмета труда и, главное, пре-
терпевают изменения при взаимодействии с РО. Мы будем рассматривать
только физико-механические и технологические свойства предмета труда,
которые оказывают существенное влияние на механику и режимы функцио-
нирования рабочих органов.
Из физико-механических свойств предмета труда наибольший интерес
представляют прочностные свойства, которые варьируются в более узких
пределах и оцениваются следующими параметрами: пределы прочности, мо-
дули упругости и пластичности, относительное удлинение, коэффициент
Пуассона, коэффициент динамической вязкости и т.п. Свое необходимое и
первостепенное значение данные свойства приобретают при оптимизации
динамических параметров рабочих органов и определении нагрузок.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
7. 7
Технологические свойства предмета труда приобретают первостепен-
ное значение при обосновании режимов функционирования РО. К ним мы
относим: размерные характеристики, плотность и влажность, массу, коэффи-
циенты трения, угол естественного откоса, наличие примесей и др. Часто
предмет труда при работе мобильных лесохозяйственных агрегатов выпол-
няет функции опорной поверхности или среды движения машин, параметры
которых оцениваются случайными величинами и носят нелинейный харак-
тер.
Основы механики взаимодействия РО с предметом труда были зало-
жены академиком В.П. Горячкиным [3]. Большой вклад в развитие теории
измельчения растительных материалов внесли Н.Е. Резник [4,5], В.А Ясе-
нецкий [6], М.З. Цымерман [7] и многие другие. Теория измельчения кормов
представлена в работах Г. М Кукты [8], В.Р. Алешкина [9], Ф.С. Кирпични-
кова [10], Г.Е. Листопада [11] и других авторов. Большой вклад в методику
расчетов РО внесли М.Н. Летошнев [12], А.Б. Лурье [13,14], И.А. Долгов
[15], М.В. Сабликов [16], Г.Н. Синеоков [17,18], Л.А Резников [19] и другие
ученые. В последние годы издан ряд фундаментальных учебников и посо-
бий по сельскохозяйственным и лесохозяйственным машинам
[20,21,22,23,24,25,26,27].
В опубликованных работах механика взаимодействия рабочих орга-
нов машин с предметом труда рассматривается в детерминированной поста-
новке и с ограниченным числом показателей эффективности без учета из-
менчивости природно-производственных условий и свойств предмета труда.
Стохастическое моделирование характеристик предмета труда использова-
лось в работах Р.А. Полуэктова [28], Н.П. Бусленко [29,30], А.К. Редькина
[31], А.Н Тихонова [32], П.М Мазуркина [33], а также в публикациях зару-
бежных авторов [34,35]. Реологическое моделирование взаимодействия ра-
бочих органов машин с предметом труда применялось в работах В.И. Балов-
нева [36,37], Н.Е Резника [4,5] и других авторов.
Существующие методы определения свойств предмета труда, как пра-
вило, не учитывают взаимодействие их с роторными рабочими органами, ли-
бо выполняются при невысоких скоростях взаимодействия. Расчеты рабочих
органов, выполненные на основе статических или квазистатических предпо-
сылок, при которых поверхность движения лесохозяйственных машин и па-
раметры предмета труда рассматриваются как среды и материалы с постоян-
ными физико-механическими и геометрическими параметрами, дают конст-
руктивные параметры, не удовлетворяющие условиям прочности, жесткости
и долговечности. Введение в расчеты динамических коэффициентов приво-
дит к увеличению материалоемкости. В сельскохозяйственном машино-
строении при обосновании конструктивных параметров машин принимают
стационарными нагрузки на машины от предмета труда. Данное допущение
оправдано для машин, работающих на сельскохозяйственных старопахотных
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
8. 8
почвах. Однако при обработке лесных почв, изобилующих древовидными
включениями, на РО лесохозяйственных агрегатов предаются импульсные
нагрузки, носящие нелинейный характер.
При обосновании параметров РО следует, прежде всего, оценить их
взаимодействие со специфическим предметом труда. Однако РО передают на
машину дополнительные нагрузки, связанные с кинематическим (несило-
вым) возбуждением колебаний, неуравновешенностью вращающихся масс,
сопротивлением воздуха. В почвообрабатывающих машинах РО выполняют
функции опорных элементов и движителя. Кроме того, РО и опорные эле-
менты лесохозяйственных машин деформируют опорную поверхность. Дан-
ные аспекты функционирования РО не изучались. Недостаточно использова-
лись в опубликованных исследованиях компьютерные технологии, хотя
стандарт ISO 9000 явно требует для повышения качества любой деятельно-
сти внедрения современных компьютерных разработок.
Целью настоящей работы является повышение технического уровня
РО лесохозяйственных машин за счет использования при их исследовании,
разработке, конструировании и эксплуатации научно обоснованных методов
оценки возмущающего воздействия от специфического предмета труда и
опорной поверхности движения машинно-тракторных агрегатов. Научной
основой для исследований являлись: механика машин [38], реология и меха-
ника грунтов [39,40], теория упругости и пластичности [41,42,43,44,45], ма-
тематическое и компьютерное моделирование динамических систем [46],
цифровая обработка сигналов [47], теория эксперимента [48], новые инфор-
мационные технологии. Книга является логическим продолжением ранее из-
данной монографии [49]. Материал для данной монографии собирался, обра-
батывался и анализировался в течение двадцати лет.
В первой главе даются основы механики взаимодействия РО с пред-
метом труда в детерминированной постановке. Приводится схематизация
взаимодействия, оптимизация кинематики и результаты компьютерного мо-
делирования РО почвообрабатывающих машин, которые оцениваются экспе-
риментальными исследованиями. Приводятся результаты исследований
влияния конструктивных параметров роторных рабочих органов на парамет-
ры динамики взаимодействия с предметом труда и опорной поверхностью.
Во второй главе разрабатывается механика лесной почвы как много-
компонентной среды с единичными включениями, а в третьей главе - приво-
дятся методика и результаты компьютерного моделирования ее свойств в
стохастической постановке. Предлагаемая методика апробируется при ком-
пьютерном моделировании физико-механических свойств лесной почвы на
основе данных, полученных другими авторами. Приводятся результаты мо-
делирования опорной и тяговой реакции роторных рабочих органов лесохо-
зяйственных машин при взаимодействии с лесной опорной поверхностью
движения.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
9. 9
В четвертой главе приводятся результаты исследований напряжений
и деформаций в материале при его взаимодействии с РО, выполненных на
основе реологических моделей. Даются аналитические решения для частных
случаев.
В пятой главе дается компьютерная методика экспериментальных ис-
следований механических свойств компонентов предмета труда: лесной под-
стилки, опавших листьев, хвои. Приводится описание компьютерных про-
грамм для обработки экспериментальных данных.
В шестой главе представлены результаты оценки энергоемкости
взаимодействия РО с предметом труда, приводятся результаты оптимизации
основных проектных параметров и режимов функционирования, а в седьмой
главе – аналитические исследования частных случаев взаимодействия. При-
водятся результаты аналитической и компьютерной оптимизации процессов
взаимодействия по критерию энергоемкости измельчения.
Иллюстрации в книге выполнены автором в графическом редакторе
КОМПАС-ГРАФИК (АСКОН, лицензия № К-01-00725, СибГТУ). Текст соз-
дан в редакторе Microsoft Word (Microsoft, Corp.), на вставленные объекты
даны ссылки в подрисуночной подписи. В рисунках и во вставленных объек-
тах применялся шрифт Gost type A (АСКОН), в остальных случаях – Times
New Roman (Microsoft, Corp.). Для компьютерного моделирования применя-
лись программы MathCAD (MathSoft, Inc.), MATLAB (MathWorks, Inc.), Mi-
crosoft Excel (Microsoft, Corp.) и приложения к ним. Использовались офици-
ально зарегистрированные названия программных средств.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
10. 10
1 Основы механики взаимодействия рабочих
органов с предметом труда
1.1 Схематизация взаимодействия рабочих органов
с предметом труда и опорной поверхностью
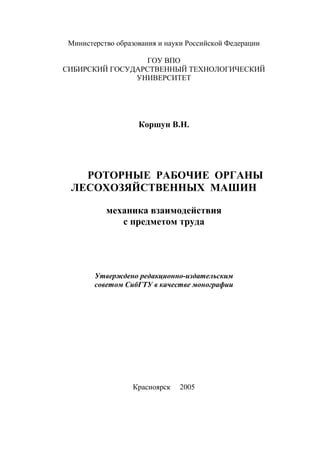
Рабочие органы мобильных лесохозяйственных машин (РО) при
взаимодействии с предметом труда (Т) совершают активное вращательное
движение с линейной скоростью по концам измельчающих элементов Vω
(рисунок 1.1), перемещаясь в пространстве с линейной скоростью Vs. Для
стационарных машин предмет труда в пространстве может перемещаться со
скоростью Vt. Проведенный анализ [49] показывает, что принципиально воз-
можно четыре кинематических схемы парного взаимодействия РО с Т.
Взаимодействие, при котором Т неподвижен, а РО совершает одновременно
вращательное и поступательное движения (схема а), характерно для мо-
бильных машин. Для почвообрабатывающих машин данная схема имеет две
разновидности в зависимости от совпадения или несовпадения направлений
линейной скорости вращения Vω и скорости агрегата Vs (попутное и встреч-
ное фрезерование).
Vs >0
Ò Vt=0
Vω > 0
à)
ÐÎ
Ò
ÐÎ
Vω > 0
Vt > 0
Vs = 0
á)
Vs > 0
Vω > 0
Ò
ÐÎ
Vt > 0
â) ã)
Vs = 0
Vt = 0
Vω = 0
Ò
ÐÎ
Рисунок 1.1 – Схемы взаимодействия РО с предметом труда
Схема б характерна для РО, ось вращения которых неподвижна в
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
11. 11
пространстве, а перемещается Т. Данная схема применима для оценки взаи-
модействия РО с Т для стационарных лесохозяйственных машин (например,
рубительных машин). В таких машинах для подачи Т к РО используются
другие рабочие органы, выполняющие транспортные функции. Схема в при-
менима для оценки взаимодействия РО с Т для мобильных машин, у которых
перемещаются в пространстве и РО и Т. Такой схемой могут оцениваться
взаимодействия рабочих органов мобильных измельчителей с подачей пред-
мета труда. Схемой г оцениваются неподвижные РО и Т, взаимодействие
которых характерно для немеханических способов (например, ультразвуко-
вое, электромагнитное или термодинамическое измельчение).
Взаимодействие РО с Т обуславливается кинематикой их движения.
Пусть движение РО, как тела в пространстве, оценивается тремя координа-
тами: X,Y,Z (рисунок 1.2), связанными с инерциальной системой отсчета. РО
лесохозяйственных машин, перемещаясь в трехмерном пространстве, со-
вершают механические движения совместно с машиной. Возможно как ми-
нимум четыре варианта сочетания способов механических движений РО
(рисунок 2.1).
Ïîñòóïàòåëüíîå
Y
Z
Vω=0
Vs>0 X
à)
êîëåáàòåëüíîå
ïîñòóïàòåëüíîå
ïåðåíîñíîå +
Ïîñòóïàòåëüíîå
Vω =0
Vs>0
Y
Z
X
á)
Âðàùàòåëüíîå
Vs=0
Vω>0
Y
Z
X
â)
Vω>0
ïåðåíîñíîå +
Ïîñòóïàòåëüíîå
Vs>0
YYYY
ZZZZ
XXXX
ã)
âðàùàòåëüíîå
Рисунок 1.2 – Схемы механических движений РО в пространстве
Схемой а (рисунок 1.2) могут быть классифицированы РО, поступа-
тельно перемещающиеся в пространстве и не совершающие вращательного
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
12. 12
движения. Кинематика таких РО является наиболее простой, и в наиболее
общем виде может быть описана тремя уравнениями: X = X(t); Y = Y(t); Z =
Z(t) (где t – время). По данному признаку могут характеризоваться пассивные
РО. Крепление РО к раме машины является конструктивно наиболее про-
стым и часто выполняется в виде тяг, стоек и кронштейнов. Не требуется
вращательный привод.
Схемой б могут оцениваться взаимодействия активных РО, совер-
шающих колебательные движения (нами не рассматриваются). Кинематика
таких РО описывается шестью уравнениями и основательно представлена в
работе О.В. Верняева [84]. Для придания РО колебательных движений тре-
буется привод. Иногда колебательные движения РО возникают вследствие
несилового (кинематического) возбуждения. Колебательные движения РО
могут вызываться рабочими нагрузками.
Схемой в классифицируются РО, совершающие только вращатель-
ное движение. Движение РО как твердого тела постоянной массы с непод-
вижным центром масс может описываться тремя уравнениями вращения во-
круг осей координат. Такие РО, как правило, устанавливаются в стационар-
ных машинах. Схема г является наиболее общей и ею можно классифициро-
вать РО, совершающие поступательное переносное и вращательное движе-
ния. Кинематика РО, классифицируемая схемой г, описывается шестью
уравнениями и подробно рассмотрена в работе Ф.М. Канарева [85].
Поскольку РО может функционировать только в составе лесохозяйст-
венной машины, то следует оценить нагрузки, передаваемые РО на раму или
остов машины. РО в машине устанавливается на опорах или при помощи
подвески. В составе машины РО часто выполняет функции, не свойственные
рабочим органам. Так, в почвообрабатывающей машине РО может выпол-
нять следующие функции: 1) изменения физико-механических, технологиче-
ских и агротехнических свойств почвы (основная функция РО); 2) опорного
элемента, передающего машине вертикальную реакцию опорной поверхно-
сти (функция опорного колеса); 3) движителя, передающего машине гори-
зонтальную реакцию опорной поверхности (функция ведущего колеса) (ри-
сунок 1.3).
Взаимодействие РО и Т в виде нагрузок передается машине по двум
каналам: через подвеску и привод. При выполнении РО функции измельче-
ния предмета труда основная нагрузка в виде моментов передается на маши-
ну через привод. При перемещении РО по опорной поверхности в нем соз-
даются несиловые (кинематические) нагрузки, которые через подвеску (опо-
ры) предаются на раму машины, вызывая в ней колебания. При выполнении
РО функции тягового элемента нагрузки в виде тяговой силы передаются на
раму машины.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
13. 13
Èçìåëü÷åíèå Îïîðíûé ýëåìåíò Âåäóùèé ýëåìåíò
Рисунок 1.3 – Функции, выполняемые РО в почвообрабатывающей
машине
На рисунке 1.4 приведена схема присоединения РО к машине. Энер-
гия от машины к РО подводится по двум каналам: через привод и через под-
веску. Назовем первый канал передачи энергии от машины к РО активным
(вращательным), а второй – пассивным (тяговым). Как в первом так и во вто-
ром канале, имеются упругие и диссипативные конструктивные элементы. В
них входят элементы, обладающие жесткостью, отличающейся друг от друга
на порядок. Таким образом, в лесохозяйственной машине имеется разветв-
ленная система взаимодействия РО с предметом труда и опорной поверхно-
стью. В машинно-тракторном агрегате (МТА) часто крутильная система так-
же разветвляется на две подсистемы - для привода ведущих колес и РО.
Возможна подсистема привода передних колес. РО, как динамическая систе-
ма, подвергается внешним воздействиям со стороны предмета труда или
опорной поверхности, приводов и подвески. Анализ показывает, что для
МТА спектр частот воздействий от РО находится в пределах от 10 до 100 Гц.
Анализ научно-технических работ показывает, что исследования
взаимодействия РО с Т касались главным образом первой функции, выпол-
няемой РО. В настоящее время процессы взаимодействия РО с предметом
труда разработаны на уровне научных теорий. Основоположником разрабо-
ток является академик В.П. Горячкин. Исследований функционирования РО
в качестве движителя или опорного элемента почвообрабатывающих машин
выполнено явно недостаточно. Исследования взаимодействия РО с Т при
поворотах почвообрабатывающих агрегатов не проводилось. Не проводились
исследования взаимодействия РО с Т для многороторных машин.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
14. 14
X
Z
Y
w
Ðàáî÷èé îðãàí
Ïîäâåñêà
Ïðèâîä
èëè îïîðû
Рисунок 1.4 – Схема взаимодействия РО и машины
1.2 Кинематика взаимодействия рабочих органов
с предметом труда
Механику взаимодействия РО с предметом труда можно исследовать
на кинематической или динамической модели. Кинематика взаимодействия
РО с предметом труда является наиболее изученной. В качестве примера
можно привести работы В.П. Горячкина [3], Ф.М. Канарева [51], Е.П. Яцу-
ка [52], М.Н. Летошнева [12], Г.Н. Синеокова [18], В.А. Ясенецкого [6],
Ю.А. Добрынина [54], А.Б. Лурье [13,14], Н.Е. Резника [4,5], М.И. Карпенко
[53] и других. В работах указанных авторов предмет труда рассматривался
как среда с постоянными физико-механическими и геометрическими пара-
метрами, а взаимодействие РО исследовалось в детерминированной поста-
новке. Конструктивные параметры РО принимались постоянными. Не выра-
ботано единых критериев оценки и оптимизации кинематических парамет-
ров.
При исследовании кинематики РО применяются методы теоретиче-
ской механики. Кинематика РО описывается уравнениями движения: траек-
ториями наиболее характерных точек ротора, скоростями и ускорениями:
S = S(t); V = V(t); W = W(t), где [S - траектория; V – скорость; W – ускорение;
t - независимый параметр кинематики (время)]. В самом первом приближе-
нии траекторию движения оси ротора можно условно считать прямолиней-
ной, хотя неровности обрабатываемой поверхности почвы и опорной поверх-
ности оказывают значительное влияние на кинематику ротора.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
15. 15
Проанализируем величины кинематических параметров РО лесохо-
зяйственных машин.
1. Скорость резания, Vp, м⋅с-1
. При обосновании режимов резания и
измельчения определяющим параметром является скорость взаимодействия
измельчающих элементов с неподвижным предметом труда. Мы понимаем
под данным параметром линейную скорость движения измельчающих эле-
ментов. Кинематически скорость резания определяется следующими пара-
метрами: диаметром ротора по концам измельчающих элементов Dp и угло-
вовой скоростью ротора ω, рад⋅с-1
.
Проведенные расчеты скорости резания для существующих РО сель-
скохозяйственных и лесохозяйственных машин показывают, что величина
данного параметра меняется в довольно широких границах. Наименьшее ее
значение наблюдается в почвообрабатывающих машинах, а наибольшее – в
газонокосилках и дезинтеграторах [49].
2. Скорость вращения ротора, ω, рад⋅с-1
. Вращение рабочего органа
является отличительной особенностью роторных рабочих органов. Величина
скорости колеблется в довольно широких пределах. Наименьшее ее значение
задается для почвообрабатывающих машин, а наибольшее – для косилок.
3. Кинематический параметр, λ. Данный безразмерный параметр яв-
ляется комплексным и определяется как отношение линейной скорости дви-
жения измельчающих элементов ротора к поступательной скорости движе-
ния агрегата либо к скорости подачи предмета труда в измельчитель. Кине-
матический параметр оказывает существенное влияние на качество измель-
чения. Величина данного кинематического параметра у большинства ротор-
ных рабочих органов находится в широких пределах. По сути дела, данный
параметр является измерителем количества движения.
Результаты расчетов кинематических параметров для РО сельскохо-
зяйственных и лесохозяйственных машин приведены в работе [55], а также
представлены в таблицах 1.1 – 1.4.
Исходя из величины скорости движения измельчающих элементов,
РО всех сельскохозяйственных и лесохозяйственных машин можно условно
разбить на три класса.
К первому классу мы относим РО, имеющие сравнительно невысокие
значения скоростей движения измельчающих элементов, у которых опреде-
ляющими на процесс взаимодействия РО с предметом труда являются гео-
метрические характеристики самих измельчающих элементов (размеры, ко-
личество, углы заточки и т.д.) и траектории их движения. Из существующих
машин в этот класс попадают фрезерные почвообрабатывающие машины,
роторные плуги и роторные культиваторы, роторные рабочие органы до-
рожно-строительных и мелиоративных машин. Источником энергии, за счет
которой осуществляется измельчение предмета труда, в РО первого класса
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
16. 16
выступает источник силы, а накопителем энергии является масса РО. Пред-
метом труда является почва (грунт). Величина скоростей взаимодействия из-
мельчающих элементов с предметом труда (почвой) у существующих сель-
скохозяйственных и лесохозяйственных машин не превышает 10 м⋅с-1
, а ско-
рости вращения РО – 5 рад⋅с-1
. РО, отнесенные нами к первому классу, взаи-
модействуют, как правило, с лесной почвой, дерниной и грунтом, находящи-
мися в естественном состоянии. В лесном хозяйстве аналогичные РО уста-
новлены в машинах для обработки сильнозадерненных, засоренных и уплот-
ненных почв, в условиях ограниченной маневренности агрегатов, при предъ-
явлении повышенных требований к качеству обработки почвы. Взаимодейст-
вие РО с предметом труда осуществляется по схеме: предмет труда (почва)
неподвижна, а перемещается сам РО (схема а, рисунок 1.1).
Плуг ПРН-40 занимает по данной классификации промежуточное по-
ложение. При обработке почвы указанным плугом, почвенный пласт подает-
ся лемешным корпусом на ротор с начальной скоростью 1 – 2 м⋅с-1
, а затем –
измельчается. Конструктивно такие РО могут иметь рабочую камеру, в кото-
рой происходит дополнительное измельчение. Высокое значение скорости
резания для грунтомета ГТ-3 можно объяснить тем, что рабочий орган в дан-
ном случае помимо резания грунта, выполняет функции швыряния частиц
грунта, т.е. выполняет транспортную функцию, не свойственную рабочим
органам технологических машин.
Ко второму классу мы относим роторные РО, которые измельчают
предмет труда за счет резания его на мелкие части лезвиями различного про-
филя. Конструктивно такие РО снабжаются противорежущими элементами.
Кроме основной технологической функции, подобные рабочие органы вы-
полняют дополнительно транспортирование измельченной массы. Данные
рабочие органы часто именуют измельчителями [5]. В зарубежной литерату-
ре подобные РО обозначаются термином Shredder. По данным Н.Е Резника,
подтвержденными исследованиями ВИСХОМа, скорость движения лезвия
ножа по отношению предмета труда у таких аппаратов должна быть не менее
20 м⋅с-1
. При такой скорости обеспечивается устойчивое и качественное вы-
полнение технологического процесса при приемлемых значениях энергоза-
трат. Процесс резания РО выполняется без скольжения и со скольжением.
Часто процессы происходят со снятием стружки. При скользящем действии
происходит перемещение измельчаемого материала относительно ножа. Оп-
ределяющими факторами являются: нормальное давление на материал;
скольжение ножа; защемление материала; скорость резания.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
17. Таблица 1.1 - Кинематические характеристики роторных рабочих органов
фрезерных почвообрабатывающих машин (первый класс)
Параметры ФЛУ-
0,8
ФЛШ-
1,2
МФ-20 ФПШ-
1,3
ФБН-2 ФБН-
1,5
ФПШ-
200
ФС-0,9 ФП-2 МТП-4,2
Длина ротора, м 0,8 1,2 2,0 1,3 2,0 1,42 1,45 –
2,20
0,9 1,4;
2,16
1,7
Глубина обработки,
см
16 16 10 15 25 25 0,06 –
0,15
10 6 – 13 25
Частота вращения
ротора, с-1
4,0 3,6 1,25 3,6 3,9 4,0 3,6 3,2 3,1
Агрегатируемый
трактор
ЛХТ-
55
ЛХТ-
55
Друж-
ба-4
Т-16М Т-130 Т-150 МТЗ-82 МТЗ-82 МТЗ-82 К-701
Масса конструктив-
ная, кг
750 850 50 500 1680 960 660 405 550 5490
Производительность,
га, за час чистой ра-
боты
0,06 0,2 0,54 0,55 1,1 0,2 0,4 –
1,0
0,13
Диаметр ротора, м 0,64 0,6 0,34 0,71 0,64 0,4 0,82
Рабочая скорость аг-
регата, м⋅с-1
0,8 0,6 0,5 0,4 1,0 1,2 0,9 0,8 0,4 0,1
Скорость по концам
ножей, м⋅с-1
8,0 6,8 1,3 6,2 8,6 8,0 - 6,4 6,2 7,9
Кинематический
критерий
10,0 11,3 2,6 15,5 8,6 6,6 - 8,0 15,5 79
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
18. 18
Таблица 1.2 - Кинематические параметры роторных рабочих органов
плугов и культиваторов (первый класс)
Параметры ГТ-3 СК-19 КФП-
1,5
ЭМ-12А ПРН-
40
КФУ-1,5 КРМ-0,5 АКР-3,6 КЛН-
1,2
Длина ротора, м 0,30 0,50 1,25 0,12 0,40 1,5 0,50 3,6 1,40
Глубина обработки,
см
25 5 10 10 30 – 70 13 8 12 7
Рабочая скорость
агрегата, м⋅с-1
1,0 0,2 0,3 –
0,8
0,3 1,4 0,4 0,1
Диаметр ротора, м 0,74 0,28 0,4 0,3 0,4 1,8
Частота вращения
ротора, с-1
10 10,0 2,5; 5 3,8 3,2
Агрегатируемый
трактор
Т-150К «Друж-
ба-4»
Т-16М Электро-
привод
АОЛД-32
ДТ-75 Т-40 «Друж-
ба -4»
ЛХТ-
55
Масса конструк-
тивная, кг
1200 45 345 87
Производитель-
ность, га, за час
чистой работы
0,012 0,54 0,015 1,9 0,8 0,19 2,4
Скорость по кон-
цам ножей, м⋅с-1
23,2 43.5 78,5 11,6 3,4 2,6 18,0
Кинематический
критерий
23,2 43,5 78,5 11,6 3,4 5,2 180
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
21. 21
По данным ВИСХОМа, в случае применения вращательно-
цилиндрических аппаратов (барабанных) наклонного резания с противоре-
жущими пластинами скорость лезвия ножа 10 – 15 м⋅с-1
является достаточной
для измельчения. Если же измельчитель выполняет и пневмошвыряние из-
мельченной массы в кузов транспортного средства, то скорость ножей дово-
дится до 40 м⋅с-1
. Предметом труда является, как правило, материал расти-
тельного происхождения либо сами растения. Взаимодействие РО с предме-
том труда осуществляется по схеме: ось РО неподвижна (или перемещается
прямолинейно вместе с агрегатом), а предмет труда подается к РО дополни-
тельными устройствами (схемы б и в, рисунок 1.1).
Ко второму классу мы также должны отнести РО для измельчения
древесины.
К третьему классу следует отнести РО, имеющие скорости движе-
ния измельчающих элементов свыше 40 м⋅с-1
. Такие РО получили распро-
странение в машинах для кошения и измельчения травянистой растительно-
сти при использовании пневматического подпора стеблей. Так, по данным
АКХ имени К.Д. Памфилова, указанная выше скорость должна находиться в
пределах от 40 до 43 м⋅с-1
. По опубликованным данным, для бесподпорного
перерезания отдельно стоящих стеблей кустарников (в машинах для подрез-
ки кустарниковых изгородей) скорость движения лезвий ножей должна со-
ставлять значения в пределах от 20 до 35 м⋅с-1
. Для обеспечения ровного сре-
за травостоя партерных и аэродромных газонов ножи должны двигаться со
скоростью 60 – 90 м⋅с-1
. Такая скорость является максимальной для всех из-
вестных роторных РО. Частота вращения ротора может достигать значения
200 с-1
(кусторез УСБ-25КМ). По данным ВИСХОМа, в кукурузоуборочном
комбайне «Херсонец – 7» измельчение стеблей происходит устойчиво только
при скорости ножей не менее 40 м⋅с-1
, что обусловливает высокую энергоем-
кость процесса измельчения. При высоких скоростях взаимодействия РО с
предметом труда определяющими становятся динамические параметры (мас-
сы и скорости движения). Измельчение осуществляется в основном за счет
кинетической энергии измельчающих элементов.
Приведенный выше анализ показывает, что взаимодействия РО с
предметом труда осуществляется при скоростях от 5 до 100 м⋅с-1
, однако су-
ществующие методики предполагают определять параметры предмета труда
либо в статике, либо при скоростях значительно меньших, чем указанные
выше. На основе кинематических моделей взаимодействия определяют гео-
метрические параметры: размеры РО и рабочей камеры, рабочую скорость
агрегата, производительность, подачу на один оборот ротора или кинемати-
ческий критерий, размеры измельченных частичек. Мощность, рассчитанная
по кинематической модели по удельным показателям, является заниженной и
не отражает реальные затраты энергии на привод РО. В существующих ки-
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
22. 22
нематических моделях взаимодействия геометрия РО считается неизменяе-
мой, т.е. считается, что при вращении не изменяется относительное располо-
жение масс. Однако многие РО имеют гибкие, упругие или шарнирно-
закрепленные на роторе элементы, которые при вращении изменяют относи-
тельное расположение масс, вызывая кинематические нагрузки.
Как мы уже ранее отмечали, кинематика взаимодействия РО с Т явля-
ется наиболее проработанной, получены расчетные зависимости для опреде-
ления кинематических параметров. Для почвообрабатывающих машин наи-
более полно кинематика представлена в работах Ф.М. Канарева [51],
Ю.Н. Матяшина [23], И.М. Панова и Г.Н. Синеокова [18] и других авторов.
Для кормоизмельчителей расчетные формулы для кинематических парамет-
ров даны в работах Н.Е. Резника [4,5], Г.М. Кукты [8], В.Р. Алешкина [9],
П.М.Рощина [56], А.Н. Габуния [57] и других авторов. Остановимся подроб-
но на оптимизации кинематических параметров взаимодействия.
1.3 Оптимизация кинематики взаимодействия
1.3.1 Оптимизации кинематики горизонтального ротора
Роторные рабочие органы с горизонтальной осью вращения широко
применяются в сельскохозяйственных и лесохозяйственных машинах.
Обычно используют прямое или обратное вращение ротора. В случае жест-
кого (неподвижного) крепления измельчающих элементов (ножей) на роторе
траекторию движения любой точки ножа можно описать уравнениями (1.1).
Кривая, которую будет описывать точка, представляет собой укороченную
циклоиду (трохоиду) [55]. Схема траектории движения показана на рисун-
ке 1.5.
Уравнение траектории в параметрической форме:
−=
−=
)cos1(
)sin(
trz
ttrx
ωλ
ωλω , (1.1)
где r - радиус окружности; −⋅ tω угол качения ( PMO1∠ ), 1MO = λ⋅r.
Вершины траектории движения (точки А1, А2, ... , Ак):
))1(,)12(( rrkА ⋅+⋅− λπk - максимумы с радиусом кривизны:
./)1( 2
λλ+= rRA
Точки минимума траектории (точки В0, В1,В2, ..., ВК):
),)1(,2( rrkBk
λπ −⋅ - с радиусом кривизны: ./)1( 2
λλ−= rRB
Длина дуги (ВКВК+1): ∫ −+
π
ωλλ
2
0
2
cos21 tdtr .
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
23. 23
Площадь траектории, заштрихованной на рисунке 1.5:
).2( 22
λπ +⋅= rS (1.2)
Узловые точки (DK): ),2
0
2
)(1(,2( trrk ωλπ −− где - −⋅ 0tω наи-
меньший положительный корень уравнения: .0sin =− tt ωλω
Определим влияние траекторий движения измельчающих элементов
на их геометрические и кинематические параметры. Для этого на рисунке 1.5
отсчет времени движения измельчающего элемента будем вести от момента
касания им поверхности почвы, а начало координат в этот момент перемес-
тим в точку Вк. Если на роторе имеется z измельчающих элементов, то в те-
чение времени t = 2π/ω , будут взаимодействовать с предметом труда все
измельчающие элементы. За это время рабочий орган переместится на рас-
стояние:
λ
π
⋅
⋅
=
z
r
S
2
. (1.3)
Расстояние, определяемое формулой (1.3), называется шагом [51].
Очевидно, что уравнение траектории текущей точки М (рисунок 1.5)
определяется выражениями (1.1). Точка М1 (рисунок 1.6) - вход измельчаю-
щего элемента в почву, точка М2 - выход. В точке М1 имеем скорее всего яв-
ление удара, а на траектории М1-М2 - резание и крошение, в свою очередь,
после точки М2 - перемешивание. Заштрихованная площадь на рисунке 1.4 -
это площадь, в которой измельчающие элементы не взаимодействуют с
предметом труда.
Высота необработанных гребешков hг ограничивается агротехниче-
скими требованиями.
В случае перекрытия траекторий соседних измельчающих элементов
увеличиваются затраты энергии на функционирование ротора и возрастает
количество пылевидных частиц, а удаление траекторий - приводит к образо-
ванию пропусков.
Рассмотрим треугольник О3М2М (рисунок 1.6), из него имеем:
,0
0
2
0
220sin ψ
λλ
π
ψ ⋅+
⋅
⋅
=+=⋅
R
z
r
MMMMr (1.4)
Кроме того:
0cosψ⋅−= rrhд . (1.5)
Из уравнений (1.4) и (1.5) можно легко получить выражение
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
24. 24
Z Vo Направление движения агрегата
A1 A2
M Ra
+Y O O1
Do ωωωωt r D1 D2
Bo P B1 Поверхность почвы B2
Рисунок 1.5 - Схема траектории движения горизонтального ротора
)arccos(sin
)arccos(
r
hr
z
r
hr
z
д
д
−
⋅
−
⋅+
=
π
λ , (1.6)
где z - число измельчающих элементов (ножей) на одном диске в од-
ной плоскости, нормальной продольной оси вращения ротора.
Уравнение (1.6) связывает конструктивные параметры роторного ра-
бочего органа (r и z), кинематику его движения (λ) и агротехнические требо-
вания (hГ).
Цель оптимизации кинематики - экономия энергозатрат. Очевидно,
что величина энергозатрат определяется главным образом кинематическим
критерием (1.6) - отношение линейной скорости вращения измельчающих
элементов к поступательной скорости агрегата. Что следует делать с этим
критерием? Его надо минимизировать. Управляющими (проектными) пара-
метрами являются: радиус ротора по концам измельчающих элементов
(r > 0 ); количество ножей на одном несущем диске (z > 0), причем z является
целочисленной переменной.
Выражения, стоящие в круглых скобках в формуле (1.6), определяют
область допустимых проектных решений. Поскольку функция «arccos х» яв-
ляется монотонно убывающей и не имеет предела при .∞→x Приведем вы-
ражение (1.6) к виду удобному для оптимизации
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
25. 25
)1arccos(sin
)1arccos(
r
h
z
r
h
z
д
д
−⋅
−⋅+
=
π
λ (1.7)
V0t Z
ωωωω V0
O1 O2 O3
ψψψψ
ψψψψ0000
+Y
M1
M2 h
M
hг B0 r/λλλλ X
Рисунок 1.6 - Схема к оптимизации кинематики роторов
Из рисунка 1.6 по геометрическим соображениям можно получить
выражение для hГ [51]:
[ ]{ })1(/cos −⋅−≈ λπ zrrhд (1.8)
Выражения, стоящие в круглых скобках в формуле (1.7), дают нам
область определения функции:
1)/1(1 ≤−≤− rhд (1.9)
При обработке сельскохозяйственных площадей рекомендуется зада-
вать hГ = 2 см [52].
Если разрешить неравенство (1.9) относительно hГ , то получим:
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
26. 26
.0 rhд ≤≤ (1.10)
Положив в уравнении (1.7) hГ = r, получим:
)./11(/ zz +=+= πππλ (1.11)
Выражение (1.11) связывает кинематический параметр и число из-
мельчающих элементов. Из выражения (1.11) видно, что с увеличением чис-
ла измельчающих элементов на роторе значение кинематического параметра
можно задавать меньшим.
Пусть в уравнении (1.7) hГ = 0, отсюда получим:
.∞⇒λ (1.12)
Из выражения (1.12) следует вывод, что для того чтобы уменьшить
высоту гребешков hГ необходимо увеличивать кинематический критерий.
Если разрешить неравенство (1.9) относительно r, то получим:
.2/ ∞≤≤ rhд (1.13)
Положив в уравнении (1.7) r = hГ /2, получим:
)
3
1(4
z
+= πλ (1.14)
Несложный анализ ограничений на проектные параметры показыва-
ет, что минимально возможное значение )/11( z+≥πλ . Обычно в процессе
функционирования роторных рабочих органов высота гребешков оказывает-
ся меньше расчетной вследствие осыпания. Оптимум в выражении (1.7) на-
ходится на правой границе ограничений:
)./11(min z+= πλ (1.15)
На начальных стадиях проектирования кинематический параметр
можно выбирать из соотношения [51]:
),1/(1)/( mhrr −=−=λ (1.16)
где m = h/r, h - глубина обработки почвы.
Обычно при расчетах роторных рабочих органов лесохозяйственных
машин принимают m = 0,4 - 0,8. Поскольку глубина обработки почвы зада-
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
27. 27
ется агролесоводсвенными требованиями, то представляется возможным оп-
ределение диаметра рабочего органа:
.
1
2
−
⋅
=
λ
λ h
D (1.17)
Формула (1.17) позволяет определять диаметр роторного рабочего
органа при известных значениях кинематического параметра и глубины об-
работки почвы. В таблице 1.5 приведены ориентировочные значения глубин
обработки почвы [55].
Таблица 1.5 - Ориентировочные значения глубины
обработки почвы, h , см
Природная
зона
Боры Субори Судубравы
и сурамени
Дубравы
Лесная 10 - 18 15 - 18 15 - 20 18 - 22
Лесостепная 18 - 22 18 - 22 20 - 25 22 - 25
Степная 20 - 25 23 - 27 25 - 30 25 - 30
Функция (1.7) является непрерывно дифференцируемой, по крайней
мере на участке, определяемым неравенством (1.9).
Поскольку функция (1.7), - сложная, то, безусловно, требуется допол-
нительное ее исследование на монотонность, конструирование целевой
функции и анализ чувствительности ограничений на проектные параметры.
Обозначим:
≡−=
≡−+=
),()1arccos(sin
),()1arccos(
2
1
rzf
r
h
z
rzf
r
h
z
д
д
λ
πλ
(1.18)
С учетом принятых обозначений можно записать:
).,(
),(
2
1
rzf
rzf
=λ
Причем, f1(z,r) - монотонно убывающая функция.
Если функция (1 - hГ/r) - монотонно убывающая функция, тогда про-
изведение двух функций - монотонно убывающая функция.
Из формул (1.11) и (1.14) следует монотонность убывания зависимо-
сти кинематического критерия от z.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
28. 28
Анализ функции f2(z,r) показывает, что аргумент функции определен
на интервале в соответствии с условием (1.9). В свою очередь функция f2(z,r)
-вложенная из двух функций, имеющих разный знак монотонности:
[ ]).,(),(),( **
2
*
2
2 rzfrzfrzf ⋅= (1.19)
Графики этих функций показаны на рисунке 1.7. Для нас представля-
ет несомненный интерес точка пересечения графиков (А). Поскольку мы со-
бираемся минимизировать кинематический критерий (в этом случае энерго-
затраты будут минимальными), то очевидно, что минимум функции (1.7) бу-
дет достигаться в случае, когда f2(z,r) стремится к максимуму (поскольку
данная функция стоит в знаменателе). С достаточным основанием можно
предположить, что в точке А существует локальный оптимум. Во всяком
случае, эта точка является “подозрительной” на локальный оптимум. Из ри-
сунка 1.7 видно, что в точке локального оптимума f2* = f2**, т.е.:
)1arccos()1arccos(sin
r
h
r
h
z
дд
−=−⋅ (1.20)
Обозначив ,)1arccos( α≡−
r
hд
получим ,
1sin
z
=
α
α
разложив в ряд
sinα, и взяв два первых члена ряда, получим
!3
sin
3
α
αα −= .
Решая уравнение, получим зависимость в точке локального оптиму-
ма:
!3
)/11(
)1arccos(
z
r
hд −
=− (1.21)
Рисунок 1.7 – Область допустимых проектных параметров
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
29. 29
Подставив выражение (1.21) в формулу (1.7), получим целевую
функцию для кинематического критерия в точке оптимума (учитываем толь-
ко положительное значение квадратного корня):
−
⋅
−
+
=
)
!3
/11
(sin
)
!3
/11
(
*
z
z
z
zπ
λ . (1.22)
Выражение (1.22) показывает зависимость кинематического критерия
от числа ножей (на одном диске) на роторе. Анализ чувствительности про-
ектных параметров в окрестностях точки оптимума удобнее всего провести с
помощью ПЭВМ (используется программное средство - Excel). Результаты
расчетов приведены в таблице 1.6 и показаны на рисунке 1.8.
Из выражения (1.8) представляется возможным определения опти-
мального радиуса рабочего органа по критерию минимума высоты гребеш-
ков:
−
−
=
)1(
cos1 *
*
λ
π
z
h
r
д
(1.23)
Таблица 1.6 - Анализ чувствительности проектных решений в
окрестностях оптимума для горизонтального ротора
(фрагмент рабочего документа Excel)
Число но-
жей
Кинематиче-
ский критерий
Радиус рабочего органа R, см
при [hг], см
λλλλ* 1,00 2,00 3,00 4,00 5,00 6,00
1 - - - - - - -
2 6,53 24,97 49,94 74,91 99,88 124,85 149,83
3 4,22 19,07 38,14 57,21 76,28 95,35 114,41
4 3,29 17,16 34,33 51,49 68,66 85,82 102,98
5 2,78 16,26 32,52 48,77 65,03 81,29 97,55
6 2,46 15,75 31,5 47,25 63,01 78,76 94,51
7 2,24 15,44 30,89 46,33 61,78 77,22 92,67
8 2,08 15,25 30,51 45,76 61,01 76,26 91,52
9 1,95 15,13 30,26 45,4 60,53 75,66 90,79
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
30. 30
λ*=f(z)
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
1 2 3 4 5 6 7 8 9
z
λ*
Рисунок 1.8 - График зависимости кинематического критерия (λλλλ*
) от
числа измельчающих элементов на одном диске (z)
(фрагмент рабочего документа Excel)
Затененная зона в таблице 1.6 показывает область недопустимых про-
ектных решений. Иначе говоря, допустимые проектные параметры для ро-
торного рабочего органа при любых значениях допускаемой высоты гребеш-
ков не могут быть меньше, чем z = 1; R = 24 см.
При увеличении числа ножей z на роторе значение кинематического
критерия резко уменьшается, а при значениях z = 5..6 скорость уменьшения
кинематического критерия замедляется и при значениях z > 8 увеличение
числа ножей не дает никакого выигрыша.
Анализ расчетов показывает, что чувствительность к z в точке опти-
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
31. 31
мума достаточно слабая, тем не менее, с увеличением z кинематический
критерий слабо уменьшается.
Выражение (1.23) удобно проанализировать с помощью ПЭВМ.
Зависимость радиуса рабочего органа от кинематического параметра
показана на рисунке 1.9. Анализ показывает, что чувствительность к λ в
точке оптимума довольно слабая.
R = f( λ *, hг)
0
20
40
60
80
100
120
140
160
6,53 4,22 3,29 2,78 2,46 2,24 2,08 1,95
λ∗
R
[hг] = 6,0
[hг] = 5,0
[hг] = 4,0
[hг] = 3,0
[hг] = 2,0
[hг] = 1,0
Рисунок 1.9 - График зависимости радиуса рабочего органа R
от кинематического критерия (λ*
)
(фрагмент рабочего документа Excel)
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
32. 32
Пример расчета
Рассчитать основные параметры роторного рабочего органа для
обработки лесных почв (субори).
1.Зададим глубину обработки почвы (таблица 1.6). Для суборей h=18 см.
Допустимая высота гребешков по агролесоводственным требованиям
[hг] = 4 см. Примем число ножей на одном диске ротора z = 3.
2.По формуле (1.22) рассчитываем минимальное значение кинематиче-
ского критерия
[ ] 22,4
!3/)3/11(sin3
!3/)3/11(3*
=
−⋅
−+
=
π
λ
.
Если сравнить найденное минимальное значение λ с ограничением
(1.15), то видно, что оптимальное значение кинематического критерия до-
вольно близко к значению данного критерия на границе
λ min = π (1 + 1/z)= π (1 + 1/3) = 4,18,
λ min = 4,18 < λ *
= 4,22.
3.По формуле (1.23) определяем оптимальное значение радиуса рабочего
органа
r*
= 4 / {1 - cos[π / (3 (4,22
- 1 ))]} < 75 см.
Принимаем диаметр рабочего органа по концам измельчающих элемен-
тов D = 150 см. Если подсчитать диаметр рабочего органа исходя из условия
обеспечения требуемой глубины обработки почвы (1.17), то получим
D = 47 см.
Проведенные расчеты несколько разнятся с результатами расчетов, при-
веденных в работе [51].
Окончательно принимаем решение. Поскольку для обеспечения требуе-
мой глубины обработки требуется D = 47 см, это меньше D = 50 см, поэто-
му принимаем окончательно решение D = 50 см.
1.3.2 Оптимизация кинематических параметров
вертикального ротора
Роторы с вертикальной осью вращения широко применяются в сель-
скохозяйственных и лесохозяйственных машинах, например, в полосопрок-
ладывателях или для обработки приствольных кругов. Ножи ротора в дан-
ном случае воздействуют на почву по всей траектории их движения. Почвен-
ная стружка, вырезаемая каждым ножом, будет иметь в плане трапециевид-
ную форму.
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
33. 33
Уравнения движения в параметрической форме для роторов с верти-
кальной осью вращения имеют вид
−+==
=+=
ttvvz
trytrtvx
a ωλλ
ωω
sin21;0
;sin;cos
2
0
0
, (1.24)
где r - радиус окружности, которой принадлежит рассматриваемая
точка, угол ωt - отсчитывается от верхнего вертикального радиуса (рисунок
1.8).
При обосновании критерия оптимальности следует учитывать то, что
высота гребешков при таком способе функционирования ротора агролесо-
водственными требованиями не ограничивается. Однако, перекрытие траек-
торий соседних ножей ведет к увеличению энергоемкости измельчения и
степени распыленности почвы. В первом приближении мы можем принять
оптимальной такую траекторию движения, при которой траектории соседних
измельчающих элементов (работающих в одной плоскости) будут касаться.
В точках касания траекторий соседних ножей вектор абсолютной скорости
будет нормален оси движения агрегата, направляющий косинус обратится в
ноль. Поскольку направляющий косинус равен нулю, то и .0=x& Поскольку
a ,0,0),cos( ≠== a
a
a v
v
x
vx
&
(1.25)
тогда:
,sin
1
)cos(
;;cos;0 00
ttrt
r
x
r
vtrtvxx
ω
λ
ω
λ
ω
λ
ω
ω
−=′+=
≡+==
&
&
(1.26)
откуда
.
λ
ω
1
=tsin (1.27)
Из уравнения (1.27) определяем значение угла поворота ротора, при
котором траектории соседних ножей касаются (возьмем только положитель-
ное значение угла)
.
1
arccos
λ
πω −=t (1.28)
Из рисунка 1.10 очевидно, что К1М1 = r⋅sinωt, а К1К = r/λ(π−ωt), вме-
сте с тем КМ1 = К1М1 - К1К. Однако, К1М = S / 2, откуда S = 2(К1М1 - К1К).
Подставим вместо К1К и К1М1 их значения, получим
).(
2
sin2 t
r
trS ωπ
λ
ω −−⋅= (1.29)
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»