1. 6.5 Space Trusses
A space truss consists of members joined
together at their ends to form a stable 3D
structure
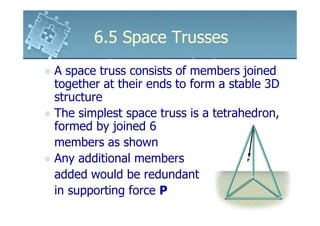
The simplest space truss is a tetrahedron,
formed by joined 6
members as shown
Any additional members
added would be redundant
in supporting force P
2. 6.5 Space Trusses
Assumptions for Design
The members of a space truss may be
treated as two force members provided
the external loading is applied at the joints
and the joints consist of ball and socket
connections
If the weight of the member is to be
considered, apply it as a vertical force, half
of its magnitude applied at each end of the
member
3. 6.5 Space Trusses
Procedure for Analysis
Method of Joints
To determine the forces in all the members of
the truss
Solve the three scalar equilibrium ∑Fx = 0, ∑Fy =
0, ∑Fz = 0 at each joint
The force analysis begins at a point having at
least one unknown force and at most three
unknown forces
Cartesian vector analysis used for 3D
4. 6.5 Space Trusses
Procedure for Analysis
Method of Sections
Used to determine a few member forces
When an imaginary section is passes through a
truss and the truss is separated into two parts,
the below equations of equilibrium must be
satisfied
∑Fx = 0, ∑Fy = 0, ∑Fz = 0
∑Mx = 0, ∑My = 0, ∑Mz = 0
By proper selection, the unknown forces can be
determined using a single equilibrium equation
5. 6.5 Space Trusses
Example 6.8
Determine the forces acting in the members
of the space truss. Indicate
whether the members are
in tension or compression.
6. 6.5 Space Trusses
Solution
Joint A
r r v r r r
P = {−4 j }kN , FAB = FAB j , FAC = − FAC k
r
r rAE
FAE = FAE
rAE
r r r
= FAE (0.577i + 0.577 j − 0.577 k )
r
∑ F = 0;
r r r r
P + FAB + FAC + FAE = 0
r r r r r r
− 4 j + FAB j − FAC k + 0.577 FAE i + 0.577 FAE j − 0.577 FAE k = 0
7. 6.5 Space Trusses
Solution
Joint A
∑ Fx = 0;− RB cos 45o + 0.707 FBE = 0
∑ Fy = 0;−4 + RB sin 45o = 0
∑ Fz = 0;2 + FBD − 0.707 FBE = 0
RB = FBE = 5.66kN (T )
FBD = 2kN (C )
To show
FDE = FDC = FCE = 0