Download as PDF, PPTX
![EVALUATION: FITNESS FUNCTION
F(~
x) =
1
M
M
X
j
[P(~
x) + min(~
x) + max (~
x)] + ω(G − 1) (3)
P(~
x) = k
N
X
i
~
rik (4)
εmin(~
x) =
N
X
i
| min[D(~
ri, ~
centre)] − Dcentre| (5)
εmax (~
x) =
N
X
i
| max[D(~
ri, ~
centre)] − Dcentre| (6)
8/24](https://image.slidesharecdn.com/main-230530114300-211c1bb7/85/Optimising-Autonomous-Robot-Swarm-Parameters-for-Stable-Formation-Design-10-320.jpg)
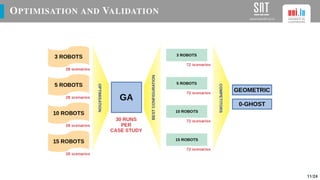
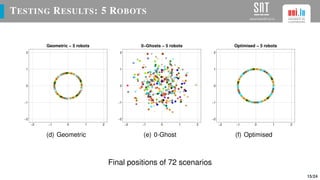
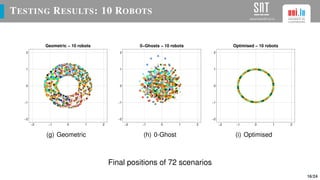
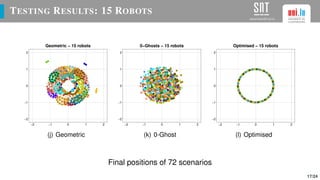
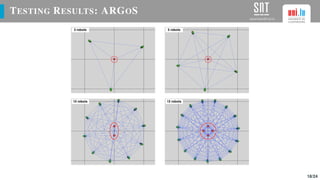
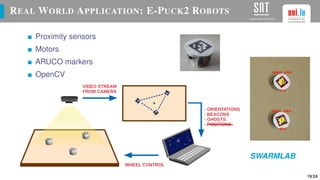

The document presents a study on optimizing parameters for autonomous robot swarm formations using a genetic algorithm (GA). It details the approaches taken, experimental results, and validation of the proposed algorithms through testing with real robots, achieving stable formations under various scenarios. Future work includes expanding robot numbers and developing a 3D formation model.