1. Практичне заняття №3: “Технологічні циклограми і циклограми взаємодії
робочих органів обладнання для виготовлення упаковок”
Метою практичного заняття є розробка технологічних циклограм і циклограм
взаємодії робочих органів пакувальної машини при виготовленні картонної
упаковки
Загальні положення
Розроблення циклограми роботи машини. Графічне зображення
послідовності окремих періодів переміщень і робочих органів пакувальних
машин за час одного кінематичного циклу, а також їх тривалість називають
цикловою діаграмою.
Складання і розрахунок циклових діаграм є відповідальним етапом
проектування багатоопераційних машин циклічної дії. Правильне складання
циклової діаграми дає змогу збільшити продуктивність машини без зростання
швидкостей переміщення робочих органів і зусиль, з якими робочі органи діють
на оброблюваний об`єкт. За допомогою циклограми визначають відносне
положення виконавчих механізмів у загальному циклі автомата.
Циклові діаграми виконують за формою 2 (2а) ГОСТ2.104−68.
Суміщення руху робочих органів пристрою. Одним з головних питань
під час конструювання пакувальних машин циклічної дії є забезпечення
максимально можливої продуктивності. Це питання вирішується як
розробленням оптимального процесу пакування з раціональною конструкцією
машини, так і оптимальним вибором законів руху робочих органів. Проте, для
машин, траєкторії переміщення робочих органів яких перетинаються, такого
підходу недостатньо. Потрібно забезпечити незіткнення робочих органів під час
роботи поряд з реалізацією оптимальних законів руху. Для вирішення цього
завдання проводяться аналітичний і графічний розрахунки сумісного
переміщення робочих органів в одному робочому просторі за заданими законами
руху і тривалості періодів кінематичного циклу. В результаті розрахунків
визначають окремий фазовий час кожного робочого органу. Сума окремих
фазових тривалостей дії робочих органів дає можливість визначити оптимальний
час кінематичного циклу машини даної конструкції.
Розрахунок тривалості кінематичного циклу та побудова циклових
діаграм руху робочих органів
Спочатку припустимо, що переміщення кожного робочого органу
здійснюється лише після того, як робочий орган, що виконує попередню
операцію, повертається у вихідне положення. Вихідним положенням будемо
вважати положення, що відповідає початку робочих переміщень. При такому
припущенні можна говорити про те, що переміщення робочих органів будуть
несуміщені.
При прийнятому припущенні про несуміщеність переміщень робочих
органів, час кінематичного циклу буде дорівнювати:
xxixpixxxpxxxpк ttttttТ ...2.2.1.1 +++++= (1)
де
2. xpit . , xxit . - тривалість періодів робочих та холостих переміщень відповідних
робочих органів, позначених індексом і .
Тривалість кінематичного циклу для усіх трьох робочих органів повинна
бути однаковою.
А тому час вистою кожного із робочих органів можна визначити:
для першого робочого органу
( )xxxpкв
ttТt .1.11 +−= ; (2)
для другого робочого органу
( )xxxpк ttТt в .2.22 +−= ; (3)
для третього робочого органу
рк tТt в
33
−= . (4)
В якості основного робочого органу приймаємо перший робочий орган і від
моменту початку ним свого робочого переміщення будемо починати відлік
робочого та кінематичного циклу.
Побудуємо циклові діаграми робочих органів при несуміщені їх рухів (рис.
2а).
Для того, щоб окремі операції були здійсненні в заданій послідовності,
циклові діаграми робочих органів повинні займати одна відносно іншої точно
визначене положення. Прийняте припущення визначає їх взаємне розташування.
Циклова діаграма робочого органу 2 повинна бути зміщена відносно
циклової діаграми робочого органу 1 на час, що визначається сумою періодів
робочого та холостого переміщень робочого органу 1, тобто:
xxxp ttt .. 111.2 += . (5)
Циклова діаграма робочого органу 3 повинна бути зміщена відносно
циклової діаграми робочого органу 2 на час, що визначається сумою періодів
робочого та холостого переміщень робочого органу 2, тобто:
xxxp ttt .. 222.3 += . (6)
Час, що відповідає зміщенню циклової діаграми даного робочого органу
відносно циклової діаграми робочого органу, що виконує попередню операцію,
називається частковим фазовим часом.
Час зміщення циклової діаграми робочого органу 3 відносно циклової
діаграми робочого органу (в даному випадку – першого) визначається сумою
часткових фазових часів:
xxxpxxxp ttttttt .... 22112.31.21.3 +++=+= . (7)
Час, що відповідає зміщенню циклової діаграми даного робочого органу
відносно циклової діаграми робочого органу називають повним фазовим часом.
Циклова діаграма пристрою, або машини, визначає відносне положення усіх
робочих органів у будь-який момент кінематичного циклу.
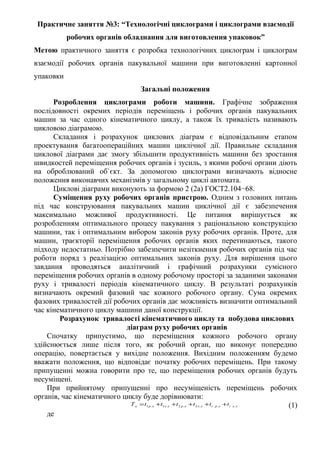
3. Рис. 2. Циклограма (а) і діаграма (б) руху
робочих органів пристрою закриття клапанів ящику
Продуктивність пристрою, або машини, залежить від тривалості
кінематичного циклу, тобто чим менша тривалість, тим вища продуктивність.
Отже, для збільшення продуктивності машини і пристрою необхідно прагнути до
максимально можливого зменшення кТ .
Із виразу (1) видно, що тривалість кТ несуміщеного кінематичного циклу
залежить від тривалості періодів робочих і холостих переміщень усіх робочих
органів. Тривалість періоду переміщення залежить, в свою чергу, від величини
повного переміщення робочого органу та закону руху для даного періоду.
4. Повне переміщення робочого органу визначається технологічною операцією,
що виконується і конструкцією машини загалом.
Якщо величини переміщень та їх закони задані, то зменшити тривалість
кінематичного циклу і тим самим збільшити продуктивність пристрою можна
лише шляхом суміщення в часі окремих технологічних операцій без зміни
заданих переміщень та законів руху окремих робочих органів.
При цьому, взаємне розташування циклових діаграм окремих робочих
органів буде таким, що періоди переміщень робочих органів будуть суміщені в
часі в межах, що допускаються конструкцією пристрою. В цьому випадку робочі
органи частину своїх переміщень будуть виконувати одночасно. за рахунок чого
час кінематичного циклу зменшиться і продуктивність пристрою збільшиться.
Але при одночасній роботі кількох робочих органів в одному робочому пристрої
вони не повинні зіштовхуватись один із іншим, що могло б привести до їх
руйнування. Враховуючи цю умову будуємо циклограму взаємодії робочих
органів пакувальної машини при виготовленні упаковки.
Завдання
Відповідно до розробленої структурної схеми машини (практична робота
№1), яка працює за одним із способів пакування продукції в картонну пачку,
розробити її технологічну циклограму і циклограму взаємодії робочих органів.