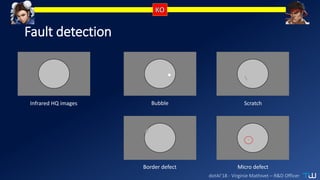
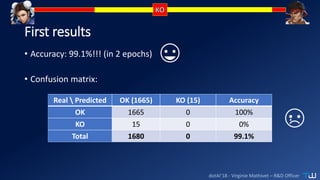
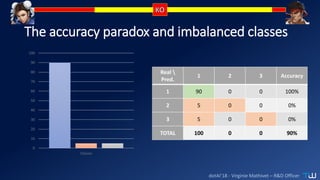
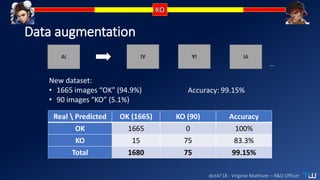
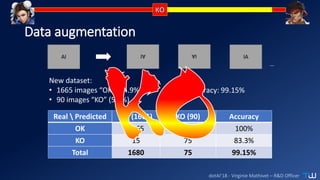
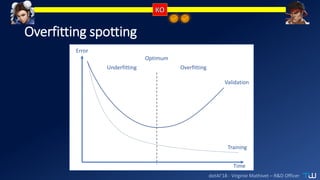
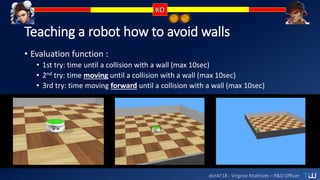
The document discusses the development and evaluation of algorithms for detecting faults and teaching virtual agents, using a series of experiments to highlight accuracy and performance metrics. Initial results showed a high accuracy of 99.1% in classifying images, with further improvements through data augmentation. It also addresses the challenges of overfitting in real robot applications and emphasizes the importance of testing on real robots early in the process.