Recommended

Recommended
More Related Content
Recently uploaded
Recently uploaded (19)
Featured
Featured (20)
Ncm 2018
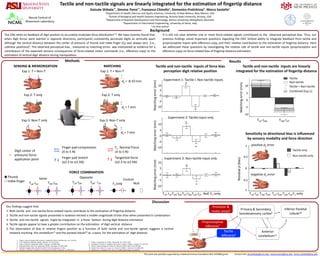
- 1. Contact Info: diceshibata@unm.edu, simone.toma@asu.edu, marco.santello@asu.edu 1. Crajé C, Lukos JR, Gordon AM, Ansuini C, Santello M. (2011). Exp Brain Res. 212: 119-124. 2. Fu Q, Zhang W, Santello M. (2010). J Neurosci. 31: 9117-9126. 3. Lukos J, Ansuini C, Santello M. (2007). J Neurosci. 27:3894-3903. 4. Zhang W, Gordon AM, Fu Q, Santello M. (2010). J Neurophy. 29: 2953-2964 5. Shibata D, Kapper AML, Santello M. (2014). Front Hum Neurosci. 8: 564. 6. Birznieks I, Jenmalm P, Goodwin a W, Johansson RS. (2001). J Neurosci. 21: 8222–8237. Tactile and non-tactile signals are linearly integrated for the estimation of fingertip distance Neural Control of Movement Laboratory Daisuke Shibata¹⁺, Simone Toma²⁺, Francesco Chinello³, Domenico Pratichizzo⁴, Marco Santello² ¹Department of Health Exercise and Sports Sciences, University of New Mexico, New Mexico, USA ²School of Biological and Health Systems Engineering, Arizona State University, Arizona, USA ³Department of Business Development and Technology, Aarhus University, Midtjylland, Denmark ⁴Department of Information Engineering, University of Siena, Italy ⁺ Co-first author Tactile and non-tactile inputs of force bias perception digit relative position Discussion Our findings suggest that: 1. Both tactile and non-tactile force-related inputs contribute to the estimation of fingertip distance 2. Tactile and non-tactile signals presented in isolation elicited a smaller magnitude of bias than when presented in combination 3. Tactile and non-tactile signals might be integrated in a linear fashion during digit distance estimation 4. Tactile signals appear to have a greater contribution on the estimation of digit vertical distance 5. The observation of bias in relative fingers position as a function of both tactile and non-tactile signals suggests a cortical network involving the cerebellum11 and the parietal lobule10 as a basis for the estimation of digit distance Tactile and non-tactile inputs are linearly integrated for the estimation of fingertip distance Sensitivity to directional bias is influenced by sensory modality and force direction 1 1 0 0.5 0.5 Residualp(bias) negative dy error Tactile only Non-tactile only positive dy error TUP-IUP TDW-IDW TUP-IDW TDW-IUPFn-only The CNS relies on feedback of digit position to accurately modulate force distribution1-4. We have recently found that, when digit forces were exerted in opposite directions, participants consistently perceived digits as vertically apart although the vertical distance between the center of pressure of thumb and index finger (dy) was always zero (i.e., collinear positions)5. The observed perceptual bias , measured as matching errors was interpreted as evidence for a contribution of the expected sensory consequences of force-related motor commands (i.e., efference copy) to the estimation of vertical digit distance during manipulation. It is still not clear whether one or more force-related signals contributed to the observed perceptual bias. Thus, our previous findings raised important questions regarding the CNS’ limited ability to integrate feedback from tactile and proprioceptive inputs with efference copy, and their relative contribution to the estimation of fingertip distance. Here we addressed these questions by investigating the relative role of tactile and non-tactile inputs (proprioception and efference copy) on force-related bias of fingertip distance estimation. Background Primary & Secondary Somatosensory cortex9 Premotor & motor areas8 Inferior Parietal Lobule10 Tactile Afferents6 Proprioceptive Afferents7 Anterior cerebellum11 Matchingerror(mm) TDW-IUPTUP-IDW 0 -10 10 -5 5 Tactile Non-tactile Combined (Exp.1) Tactile + Non-tactile Experiment 1: Tactile + Non-tactile inputs -10 Matchingerror(mm) 10 0 5 -5 -10 Matchingerror(mm) 10 0 5 -5 TUP-IUPTDN-IDN TUP-IDNTDN-IUP Null Fn-only -10 Matchingerror(mm) 10 0 5 -5 * * * * * * Experiment 2: Tactile input only Experiment 3: Non-tactile input only Thumb Index finger FORCE COMBINATION Control Fn only Null Opposite TDN - IUPTUP-IDN Finger pad stretch (±2.5 to ±3.5N) Finger pad compression (4 to 5 N) Fn: Normal Force (4 to 5 N) Tangential force (±2.5 to ±3.5N) Digit center of pressure/ force application point Exp.1: T + Non-T dy ≈ ±10 mm dy ≈ ? mm dy ≈ ? mm Exp.3: Non-T only Exp.2: T onlyExp.2: T only Exp.1: T + Non-T Exp.3: Non-T only SENSING & MEMORIZATION MATCHING Same TUP-IUP TDN-IDN Methods Results 7. Proske, U, Gandevia, SC. (2012). Physiol Rev. 92, 4 1651–1697 8. Gandevia, SC, Smith, JL, Crawford, M, Proske, U, Taylor, J. (2006). J. Physiol. 571, 703-710. 9. Kim SS, Gomez-Ramirez M, Thakur PH, Hsiao SS. (2015). Neuron. 86: 555-566. 10. Clower, D.M., West, R.A., Lynch, J.C., Strick, P.L. (2001). J. Neurosci. 21, 6283-6291 11. Blakemore, S.J., Wolpert, D.M., Frith, C.D. (1999). Neuroimage. 10, 448-459. This work was partially supported by a National Science Foundation BCS-1455866 grant.