1. Lidar data simplification based on Octree Structure
Project by Songrong Yang
Introduction
Laser
scanning
has
become
a
viable
technique
for
the
collec5on
of
a
large
amount
of
3D
point
data
densely
distributed
on
the
scanned
object
surface.
The
inherent
3D
nature
of
point
cloud
provides
abundant
spa5al
informa5on.
To
explore
valuable
spa5al
informa5on
from
the
huge
amount
of
3D
data
is
difficult
and
5me
consuming.
Simplifica5on
and
segmenta5on
are
generally
prerequisite.
We
propose
a
reduced
method
for
point
cloud
data.
This
method
transforms
the
data
of
points
into
an
octree
based
on
the
spa5al
informa5on,
such
as
area,
and
simplifies
the
data
set
in
each
node
of
the
octree.
Octree-Structure-Based Simplification
The
principle
of
the
method
is
to
segment
point
cloud
into
3D
planes
and
then
restore
the
points
of
the
boundary
of
each
plane.
The
split
process
starts
from
the
whole
data
set
as
a
root
node.
The
data
set
space
will
be
divided
into
8
equal
sub-‐spaces.
The
split
generates
8
sub-‐nodes
represen5ng
the
split
spaces.
Each
sub-‐node
will
be
split
con5nuously
un5l
the
scan
points
contained
in
the
split
space
of
the
sub-‐node
are
distributed
close
to
a
3D
best-‐fit
plane
or
less
than
3
poins.
In
each
node,
we
apply
the
applica5on
of
least-‐squares
es5ma5on
to
determine
whether
the
points
in
this
node
can
compose
a
plane.
When
there
is
a
plane
can
be
determined,
the
program
will
find
out
the
Convex
Hull
of
this
set
of
points
and
then
restore
their
informa5on.
We
simplify
the
data
set
by
filtering
out
those
points
that
are
not
used
to
form
the
plane.
Result of Experiments
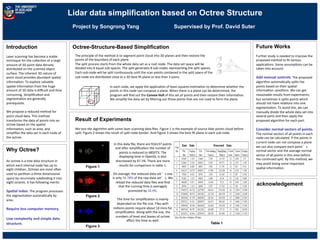
We
test
the
algorithm
with
some
laser
scanning
data
files.
Figure
1
is
the
example
of
source
lidar
points
cloud
before
split.
Figure
2
shows
the
result
of
split
node
border.
And
Figure
3
shows
the
best-‐fit
plane
in
each
sub
node.
In
this
data
file,
there
are
916137
points
and
aPer
simplifica5on
the
number
of
points
is
reduced
to
485073.
The
displaying
5me
in
OpenGL
is
also
drecreased
by
47.1%.
There
are
more
results
for
comparison
in
table
1.
On
average,
the
reduced
data
set’s
size
is
only
56.78%
of
the
raw
data
set’s.
We
reload
the
reduced
data
files
and
find
that
the
running
5me
is
averagely
promoted
by
54.9%.
The
5me
for
simplifica5on
is
mainly
depended
on
the
file
size.
Files
with
millions
points
require
about
10
mins
for
simplifica5on.
Along
with
the
size,
the
numbers
of
level
and
leaves
of
octree
affect
the
5me
as
well.
Supervised by Prof. David Suter
acknowledgement
Figure 1
Figure 2
Figure 3
Table 1
Future Works
Further
study
is
needed
to
improve
the
proposed
method
to
fit
various
applica5ons.
Some
assump5ons
can
be
taken
into
account:
Add
manual
controls.
The
proposed
algorithm
automa5cally
splits
the
points
based
on
their
spa5al
informa5on-‐-‐posi5ons.
We
can
get
reasonable
results
from
experiments
but
some5mes
it
splits
points
which
should
not
have
rela5ons
into
one
segmenta5on.
To
avoid
this,
we
can
manually
divide
the
whole
data
set
into
several
parts
and
then
apply
the
proposed
algorithm
for
each
part.
Consider
normal
vectors
of
points.
The
normal
vectors
of
all
points
in
each
node
can
be
calculated.
If
the
points
in
current
node
can
not
compose
a
plane
we
can
also
compare
each
point’s
normal
vector
and
the
average
normal
vector
of
all
points
in
this
area
before
the
con5nued
split.
By
this
method,
we
may
avoid
losing
some
important
spa5al
informa5on.
Why Octree?
An
octree
is
a
tree
data
structure
in
which
each
internal
node
has
up
to
eight
children.
Octrees
are
most
oPen
used
to
par55on
a
three
dimensional
space
by
recursively
subdividing
it
into
eight
octants.
It
has
following
merits:
Spa8al
index.
The
program
processes
the
segmenta5on
automa5cally
by
area.
Require
less
computer
memory.
Low
complexity
and
simple
data
structure.