![C Code:
#include <stdio.h>
#include <windows.h> // text color
#include <conio.h>
#define NN 6 // Degree of freedom
#define Ne 3 // number of element
void IMPORT_DATA01(double &Length,double Height[],double &EA,double &EI,double &Ultimate_Moment);
void Matrix_Stiffness(double EA,double EI,double L[],double lanX[],double lanY[],double A[],double B[],double C[],double D[],double E[],double K[][6],double K_G[][6],int I,int II);
void MatrixDetermination(double [][NN],int );
void MatrixInverse(double [][NN], double [][NN],int );
void MatrixMulti01(double [][NN], double [], double [],int );
void Matrix_Transpose(double A[6][6],double B[6][6]);
void Matrix_Multiplication(double A[6][6],double B[6][6],double C[6][6]);
void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I);// Calculate internal element force
void ELEMNT_FORCE_OUTPUT(double eleF[3][6],double ELE_FORCE[3][18],double SUM_ELE_FORCE[18],double u[],double sum_u[], int I);
double ABS(double);
double MAX_ABS(double A[],int n);
double MIN(double A[],int n);
double SQRT2(double D);
void MessageInitialData(double L,double H[],double EI,double EA,double Ultimate_Moment);
void MessageAnalysisReport();
void MessageErrorReportTEXT();
void MessageInputDataTEXT();
void MessageCheck_IMPORT_DATA01(double L,double Height[],double EI,double EA,double Ultimate_Moment);
void MessageResult(double A[],double B[3][6],int n);
void OUTPUT_excel(double A[3][6],double B[3],double C[3][18],int n);
void OUTPUT_html(double Length,double Height[],double EI,double EA,double Ultimate_Moment,double A[3][6],double B[3],double C[3][18],int n);
void OUTPUT_HTML_GRAPH(double X[],double Y[],int n,char text1[],char text2[],char text3[]);
void ANALYSIS(double Length,double Height[],double EI,double EA,double Ultimate_Moment);
void Distance(int);
void textcolor(int ForgC);
void DATE_TIME();
int main(){
double Length,EI,EA,Height[2],Ultimate_Moment;
IMPORT_DATA01(Length,Height,EA,EI,Ultimate_Moment);
MessageCheck_IMPORT_DATA01(Length,Height,EI,EA,Ultimate_Moment);
textcolor(14);
MessageInitialData(Length,Height,EI,EA,Ultimate_Moment);
textcolor(11);
MessageAnalysisReport();
ANALYSIS(Length,Height,EI,EA,Ultimate_Moment);
getch();
return 0;
}
void MatrixInverse(double A[][NN], double C[][NN],int n){
int i,j,l;
double c_A[NN][NN],B[NN][NN],m,Sum;
for (i=0;i<NN;i++)
for (j=0;j<NN;j++)
c_A[i][j]=A[i][j];
// Inverse [Kinit]
for (i=0;i<NN;i++)
for (j=0;j<NN;j++){
if (i==j)
B[i][j]=1;
else
B[i][j]=0;
}
for (j=0;j<NN-1;j++)
for (i=j+1;i<NN;i++){
m=c_A[i][j]/c_A[j][j];
for (l=0;l<NN;l++){
c_A[i][l] -= m*c_A[j][l];
B[i][l] -= m*B[j][l];
}
}
// backward substitutions
for (i=NN-1;i>=0;i--)
for (j=0;j<NN;j++){
Sum=0;
for (l=i+1;l<NN;l++)
Sum += c_A[i][l]*C[l][j];
C[i][j]=(B[i][j]-Sum)/c_A[i][i];
}
}
void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I){
double lan[6][6],UU[6],ff,ll[6][6];
int II;
lan[0][0]=lanX[I];lan[0][1]=lanY[I];lan[0][2]=0;lan[0][3]=0;lan[0][4]=0;lan[0][5]=0;
lan[1][0]=-lanY[I];lan[1][1]=lanX[I];lan[1][2]=0;lan[1][3]=0;lan[1][4]=0;lan[1][5]=0;
lan[2][0]=0;lan[2][1]=0;lan[2][2]=1;lan[2][3]=0;lan[2][4]=0;lan[2][5]=0;
lan[3][0]=0;lan[3][1]=0;lan[3][2]=0;lan[3][3]=lanX[I];lan[3][4]=lanY[I];lan[3][5]=0;
lan[4][0]=0;lan[4][1]=0;lan[4][2]=0;lan[4][3]=-lanY[I];lan[4][4]=lanX[I];lan[4][5]=0;
lan[5][0]=0;lan[5][1]=0;lan[5][2]=0;lan[5][3]=0;lan[5][4]=0;lan[5][5]=1;
if (I == 0){
UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[0];UU[4]=U[1];UU[5]=U[2];
}
if (I == 1){
UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[3];UU[4]=U[4];UU[5]=U[5];
}
if (I == 2){
UU[0]=U[0];UU[1]=U[1];UU[2]=U[2];UU[3]=U[3];UU[4]=U[4];UU[5]=U[5];
}
int i,j;
for (i=0;i<6;i++)
for (j=0;j<6;j++)
ll[i][j]=0;
// [f] = [K] *[lan]* [u]
Matrix_Multiplication(K,lan,ll);
for (i=0; i<6; i++){
ff=0;
for (j=0; j<6; j++)
ff += ll[i][j]*UU[j];
[I][i] = ff;
}
}
void MatrixMulti01(double A[][NN], double B[], double C[],int n){
int i,j;
double ff;
// [u] = [Kinv] * [f]
for (i=0; i<n; i++)
{
ff=0;
for (j=0; j<n; j++)
ff += A[i][j]*B[j];
C[i] = ff;
}
}
double ABS(double B){
if (B < 0)
B = -B;//Absolute number
else](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Nonlinear analysis of frame with hinge by hinge method in c programming
Similar to Nonlinear analysis of frame with hinge by hinge method in c programming (20)
More from Salar Delavar Qashqai
More from Salar Delavar Qashqai (20)
Recently uploaded
Recently uploaded (20)
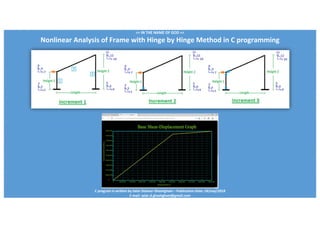
Nonlinear analysis of frame with hinge by hinge method in c programming
- 2. C Code: #include <stdio.h> #include <windows.h> // text color #include <conio.h> #define NN 6 // Degree of freedom #define Ne 3 // number of element void IMPORT_DATA01(double &Length,double Height[],double &EA,double &EI,double &Ultimate_Moment); void Matrix_Stiffness(double EA,double EI,double L[],double lanX[],double lanY[],double A[],double B[],double C[],double D[],double E[],double K[][6],double K_G[][6],int I,int II); void MatrixDetermination(double [][NN],int ); void MatrixInverse(double [][NN], double [][NN],int ); void MatrixMulti01(double [][NN], double [], double [],int ); void Matrix_Transpose(double A[6][6],double B[6][6]); void Matrix_Multiplication(double A[6][6],double B[6][6],double C[6][6]); void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I);// Calculate internal element force void ELEMNT_FORCE_OUTPUT(double eleF[3][6],double ELE_FORCE[3][18],double SUM_ELE_FORCE[18],double u[],double sum_u[], int I); double ABS(double); double MAX_ABS(double A[],int n); double MIN(double A[],int n); double SQRT2(double D); void MessageInitialData(double L,double H[],double EI,double EA,double Ultimate_Moment); void MessageAnalysisReport(); void MessageErrorReportTEXT(); void MessageInputDataTEXT(); void MessageCheck_IMPORT_DATA01(double L,double Height[],double EI,double EA,double Ultimate_Moment); void MessageResult(double A[],double B[3][6],int n); void OUTPUT_excel(double A[3][6],double B[3],double C[3][18],int n); void OUTPUT_html(double Length,double Height[],double EI,double EA,double Ultimate_Moment,double A[3][6],double B[3],double C[3][18],int n); void OUTPUT_HTML_GRAPH(double X[],double Y[],int n,char text1[],char text2[],char text3[]); void ANALYSIS(double Length,double Height[],double EI,double EA,double Ultimate_Moment); void Distance(int); void textcolor(int ForgC); void DATE_TIME(); int main(){ double Length,EI,EA,Height[2],Ultimate_Moment; IMPORT_DATA01(Length,Height,EA,EI,Ultimate_Moment); MessageCheck_IMPORT_DATA01(Length,Height,EI,EA,Ultimate_Moment); textcolor(14); MessageInitialData(Length,Height,EI,EA,Ultimate_Moment); textcolor(11); MessageAnalysisReport(); ANALYSIS(Length,Height,EI,EA,Ultimate_Moment); getch(); return 0; } void MatrixInverse(double A[][NN], double C[][NN],int n){ int i,j,l; double c_A[NN][NN],B[NN][NN],m,Sum; for (i=0;i<NN;i++) for (j=0;j<NN;j++) c_A[i][j]=A[i][j]; // Inverse [Kinit] for (i=0;i<NN;i++) for (j=0;j<NN;j++){ if (i==j) B[i][j]=1; else B[i][j]=0; } for (j=0;j<NN-1;j++) for (i=j+1;i<NN;i++){ m=c_A[i][j]/c_A[j][j]; for (l=0;l<NN;l++){ c_A[i][l] -= m*c_A[j][l]; B[i][l] -= m*B[j][l]; } } // backward substitutions for (i=NN-1;i>=0;i--) for (j=0;j<NN;j++){ Sum=0; for (l=i+1;l<NN;l++) Sum += c_A[i][l]*C[l][j]; C[i][j]=(B[i][j]-Sum)/c_A[i][i]; } } void ElementInternalForce(double K[][6],double U[],double lanX[],double lanY[],double ee[][6],int I){ double lan[6][6],UU[6],ff,ll[6][6]; int II; lan[0][0]=lanX[I];lan[0][1]=lanY[I];lan[0][2]=0;lan[0][3]=0;lan[0][4]=0;lan[0][5]=0; lan[1][0]=-lanY[I];lan[1][1]=lanX[I];lan[1][2]=0;lan[1][3]=0;lan[1][4]=0;lan[1][5]=0; lan[2][0]=0;lan[2][1]=0;lan[2][2]=1;lan[2][3]=0;lan[2][4]=0;lan[2][5]=0; lan[3][0]=0;lan[3][1]=0;lan[3][2]=0;lan[3][3]=lanX[I];lan[3][4]=lanY[I];lan[3][5]=0; lan[4][0]=0;lan[4][1]=0;lan[4][2]=0;lan[4][3]=-lanY[I];lan[4][4]=lanX[I];lan[4][5]=0; lan[5][0]=0;lan[5][1]=0;lan[5][2]=0;lan[5][3]=0;lan[5][4]=0;lan[5][5]=1; if (I == 0){ UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[0];UU[4]=U[1];UU[5]=U[2]; } if (I == 1){ UU[0]=0;UU[1]=0;UU[2]=0;UU[3]=U[3];UU[4]=U[4];UU[5]=U[5]; } if (I == 2){ UU[0]=U[0];UU[1]=U[1];UU[2]=U[2];UU[3]=U[3];UU[4]=U[4];UU[5]=U[5]; } int i,j; for (i=0;i<6;i++) for (j=0;j<6;j++) ll[i][j]=0; // [f] = [K] *[lan]* [u] Matrix_Multiplication(K,lan,ll); for (i=0; i<6; i++){ ff=0; for (j=0; j<6; j++) ff += ll[i][j]*UU[j]; [I][i] = ff; } } void MatrixMulti01(double A[][NN], double B[], double C[],int n){ int i,j; double ff; // [u] = [Kinv] * [f] for (i=0; i<n; i++) { ff=0; for (j=0; j<n; j++) ff += A[i][j]*B[j]; C[i] = ff; } } double ABS(double B){ if (B < 0) B = -B;//Absolute number else
- 3. B = B; return B; } double MIN(double A[],int n){ int i; double Cmin; Cmin = A[0]; // Max of abs for (i=0;i<n;i++){ if(Cmin > A[i]) Cmin = A[i]; } return Cmin; } void Distance(int i){ if (i < 10) printf("bt"); if (i >= 10 && i <= 99) printf("btb"); if (i >= 100 && i <= 999) printf("btbb"); if (i >= 1000 && i <= 9999) printf("btbbb"); if (i >= 10000 && i <= 20000) printf("btbbbb"); } void MessageInitialData(double L,double H[],double EI,double EA,double Ultimate_Moment){ char Qa,Qb,Qc,Qd,Qe,Qf,Qg,Qk; int i; Qa=201;Qb=205;Qc=187;Qd=200;Qe=188,Qf=186,Qg=204,Qk=185; printf("tttt%c",Qa); for (i=1;i<59;i++) printf("%c",Qb); printf("%cn",Qc); printf("tttt%c >> IN THE NAME OF GOD << %cn",Qf,Qf); printf("tttt%c Nonlinear Analysis of Frame with Hinge by Hinge Method %cn",Qf,Qf); printf("tttt%c UNIT: Free Unit %cn",Qf,Qf); printf("tttt%c",Qg); for (i=1;i<59;i++) printf("%c",Qb); printf("%cn",Qk); printf("tttt%c This program is written by Salar Delavar Ghashghaei %cn",Qf,Qf); printf("tttt%c E-mail: salar.d.ghashghaei@gmail.com %cn",Qf,Qf); printf("tttt%c",Qd); for (i=1;i<59;i++) printf("%c",Qb); printf("%cn",Qe); MessageInputDataTEXT(); printf(" Length of Frame: %.3en",L); printf(" Height of Column 1: %.3en",H[0]); printf(" Height of Column 2: %.3en",H[1]); printf(" Section flextural rigidity - EI: %.3en",EI); printf(" Section axial rigidity - EA: %.3en",EA); printf(" Section ultimate capacity moment: %.3en",Ultimate_Moment); } void MessageAnalysisReport(){ int i; char Ql=176; printf("n "); for (i=1;i<64;i++) printf("%c",Ql); printf(" Analysis Report "); for (i=1;i<64;i++) printf("%c",Ql); printf("n"); } void MessageCheck_IMPORT_DATA01(double L,double Height[],double EI,double EA,double Ultimate_Moment){ if ( L < 0 || Height[0] < 0 || Height[1] < 0 || EI < 0 || EA < 0 || Ultimate_Moment < 0 ){ MessageErrorReportTEXT(); printf(" Please check this file! -> [ PushoverHingeByHingeMethodFrame-inputDATA.csv ]n"); printf(" *** Negative data input value is not acceptable ***n"); printf(" Length of Frame: %.3en",L); printf(" Height of Column 1: %.3en",Height[0]); printf(" Height of Column 2: %.3en",Height[1]); printf(" Section flextural rigidity - EI: %.3en",EI); printf(" Section axial rigidity - EA: %.3en",EA); printf(" Section ultimate capacity moment: %.3en",Ultimate_Moment); Sleep(40000); exit(1); } } void MessageErrorReportTEXT(){ int i; char Ql; Ql=176; textcolor(12); printf("an "); for (i=1;i<50;i++) printf("%c",Ql); printf(" Error Report "); for (i=1;i<50;i++) printf("%c",Ql); printf("n"); } void MessageInputDataTEXT(){ int i; char Ql=176; printf("n "); for (i=1;i<50;i++) printf("%c",Ql); printf(" Input Data "); for (i=1;i<50;i++) printf("%c",Ql); printf("n"); } void OUTPUT_excel(double A[3][6],double B[3],double C[3][18],int n){ // EXCEL OUTPUT int i; FILE *OutputFile; OutputFile = fopen("PushoverHingeByHingeMethodFrame-outputEXCEL.csv", "w"); fprintf(OutputFile," ### Nonlinear Analysis of Frame with Hinge by Hinge Method ###n"); fprintf(OutputFile,"Increment,Base Shear[DOF(1)]+[DOF(4)],Displacement [DOF(7)],Displacement [DOF(8)],Rotation [DOF(9)],Displacement [DOF(10)],Displacement [DOF(11)],Rotation [DOF(12)],Ele.1 [DOF(1)],Ele.1 [DOF(2)],Ele.1 [DOF(3)],Ele.1 [DOF(7)],Ele.1 [DOF(8)],Ele.1 [DOF(9)],Ele.2 [DOF(4)],Ele.2 [DOF(5)],Ele.2 [DOF(6)],Ele.2 [DOF(10)],Ele.2 [DOF(11)],Ele.2 [DOF(12)],Ele.3 [DOF(7)],Ele.3 [DOF(8)],Ele.3 [DOF(9)],Ele.3 [DOF(10)],Ele.3 [DOF(11)],Ele.3 [DOF(12)]n"); for(i=0;i<n;i++) fprintf(OutputFile,"%d,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%e,%en",i+1,B[i],A[i][0],A[i][1],A[i][2],A[i][3],A[i][4],A[i][5],C[i][0],C[i][1],C[i][2],C[i][3],C[i][4],C[i][5],C[i][6],C[i][7],C[i][8],C[i][9],C[i][10],C[i][11],C[i][12],C[i][13],C[i][14],C[i][15],C[i][16],C[i][17]); fclose(OutputFile); } void MatrixDetermination(double A[][NN],int n){ // row operations int i,j,k; double Product,m,B[n][n]; for (i=0;i<n;i++) for (j=0;j<n;j++) B[i][j]=A[i][j]; for (k=0;k<n-1;k++) for (i=k+1;i<n;i++){
- 4. m = B[i][k]/B[k][k]; for (j=0;j<n;j++) B[i][j] -= m*B[k][j]; } Product=1; for (i=0;i<n;i++) Product *= B[i][i]; // display results if (Product == 0){ printf("ant ### it Seens that Golobal Matrix is singular or structure is unstable!!! ###n"); Sleep(40000); exit(1); } } void IMPORT_DATA01(double &Length,double Height[],double &EA,double &EI,double &Ultimate_Moment){ double Import_Data[6]; int i=0; FILE *InputFile; InputFile = fopen("PushoverHingeByHingeMethodFrame-inputDATA.csv", "r"); if (!InputFile){ MessageErrorReportTEXT(); printf(" File is not available! -> [PushoverHingeByHingeMethodFrame-inputDATA.csv] n"); Sleep(6000); exit(1); } char line[100],a[100]; while(i < 6 && fgets(line,sizeof(line),InputFile) != NULL){ sscanf(line,"%s",a); //printf("a[%d]: %sn",i,a); Import_Data[i]= atof(a); i++; } Length=Import_Data[0]; Height[0]=Import_Data[1]; Height[1]=Import_Data[2]; EI=Import_Data[3]; EA=Import_Data[4]; Ultimate_Moment=Import_Data[5]; } void textcolor(int ForgC){ WORD wColor; //This handle is needed to get the current background attribute HANDLE hStdOut = GetStdHandle(STD_OUTPUT_HANDLE); CONSOLE_SCREEN_BUFFER_INFO csbi; //csbi is used for wAttributes word if(GetConsoleScreenBufferInfo(hStdOut, &csbi)){ //To mask out all but the background attribute, and to add the color wColor = (csbi.wAttributes & 0xF0) + (ForgC & 0x0F); SetConsoleTextAttribute(hStdOut, wColor); } return; } void ANALYSIS(double Length,double Height[],double EI,double EA,double Ultimate_Moment){ int i,j; double K[NN][NN],Kinv[NN][NN],eleF[3][6],ELE_FORCE[3][18],SUM_ELE_FORCE[18]; double L[Ne],lanX[Ne],lanY[Ne],AA[Ne],BB[Ne],CC[Ne],DD[Ne],EE[Ne],F[NN],u[6],sum_u[6],Mi[6]; double output_u[3][6],output_base[3]; double MS[6][6],KG[6][6],LANNDA[6],LANNDA_min; double x[4],y[4]; for (i=0;i<NN;i++) for (j=0;j<NN;j++) K[i][j]=0; for (i=0;i<NN;i++){ F[i]=0;u[i] = 0;sum_u[i] = 0;Mi[i] = 0; } for(int j=0;j<3;j++){ for(i=0;i<6*Ne;i++) ELE_FORCE[j][i] = 0; } for(i=0;i<6*Ne;i++) SUM_ELE_FORCE[i] = 0; // SATAGE: 01 F[0]=1; x[0] = 0;y[0] = 0; x[1] = Length;y[1] = 0; x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1]; x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4]; L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0])); L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1])); L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2])); lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0]; lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1]; lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2]; Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1); K[0][0]= KG[3][3];//DOF(7) K[0][1]= KG[3][4];//DOF(7) K[0][2]= KG[3][5];//DOF(7) K[1][0]= KG[4][3];//DOF(8) K[1][1]= KG[4][4];//DOF(8) K[1][2]= KG[4][5];//DOF(8) K[2][0]= KG[5][3];//DOF(9) K[2][1]= KG[5][4];//DOF(9) K[2][2]= KG[5][5];//DOF(9) Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); K[3][3]= KG[3][3];//DOF(10) K[3][4]= KG[3][4];//DOF(10) K[3][5]= KG[3][5];//DOF(10) K[4][3]= KG[4][3];//DOF(11) K[4][4]= KG[4][4];//DOF(11) K[4][5]= KG[4][5];//DOF(11) K[5][3]= KG[5][3];//DOF(12) K[5][4]= KG[5][4];//DOF(12) K[5][5]= KG[5][5];//DOF(12) Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1); K[0][0]+= KG[0][0];//DOF(7) K[0][1]+= KG[0][1];//DOF(7) K[0][2]+= KG[0][2];//DOF(7) K[1][0]+= KG[1][0];//DOF(8) K[1][1]+= KG[1][1];//DOF(8) K[1][2]+= KG[1][2];//DOF(8) K[2][0]+= KG[2][0];//DOF(9) K[2][1]+= KG[2][1];//DOF(9) K[2][2]+= KG[2][2];//DOF(9)
- 5. K[3][3]+= KG[3][3];//DOF(10) K[3][4]+= KG[3][4];//DOF(10) K[3][5]+= KG[3][5];//DOF(10) K[4][3]+= KG[4][3];//DOF(11) K[4][4]+= KG[4][4];//DOF(11) K[4][5]+= KG[4][5];//DOF(11) K[5][3]+= KG[5][3];//DOF(12) K[5][4]+= KG[5][4];//DOF(12) K[5][5]+= KG[5][5];//DOF(12) K[0][3]= KG[0][3];//DOF(7) K[0][4]= KG[0][4];//DOF(7) K[0][5]= KG[0][5];//DOF(7) K[1][3]= KG[1][3];//DOF(8) K[1][4]= KG[1][4];//DOF(8) K[1][5]= KG[1][5];//DOF(8) K[2][3]= KG[2][3];//DOF(9) K[2][4]= KG[2][4];//DOF(9) K[2][5]= KG[2][5];//DOF(9) K[3][0]= KG[3][0];//DOF(10) K[3][1]= KG[3][1];//DOF(10) K[3][2]= KG[3][2];//DOF(10) K[4][0]= KG[4][0];//DOF(11) K[4][1]= KG[4][1];//DOF(11) K[4][2]= KG[4][2];//DOF(11) K[5][0]= KG[5][0];//DOF(12) K[5][1]= KG[5][1];//DOF(12) K[5][2]= KG[5][2];//DOF(12) MatrixDetermination(K,NN); MatrixInverse(K,Kinv,NN);// Inverse [Kinit] MatrixMulti01(Kinv,F,u,NN); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1); ElementInternalForce(MS,u,lanX,lanY,eleF,0); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); ElementInternalForce(MS,u,lanX,lanY,eleF,1); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1); ElementInternalForce(MS,u,lanX,lanY,eleF,2); LANNDA[0]=(Ultimate_Moment-ABS(Mi[0]))/ABS(eleF[0][2]); LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]); LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]); LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]); LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]); LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]); LANNDA_min = MIN(LANNDA,6); for (i=0;i<NN;i++) u[i]=LANNDA_min*u[i]; Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,1); ElementInternalForce(MS,u,lanX,lanY,eleF,0); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); ElementInternalForce(MS,u,lanX,lanY,eleF,1); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1); ElementInternalForce(MS,u,lanX,lanY,eleF,2); Mi[0]=eleF[0][2]; Mi[1]=eleF[0][5]; Mi[2]=eleF[1][2]; Mi[3]=eleF[1][5]; Mi[4]=eleF[2][2]; Mi[5]=eleF[2][5]; ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,0); for (i=0;i<NN;i++) output_u[0][i]=sum_u[i];//output displacement output_base[0]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7];//output base shear // So plastic hinge has formed in 1 node // SATAGE: 02 x[0] = 0;y[0] = 0; x[1] = Length;y[1] = 0; x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1]; x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4]; L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0])); L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1])); L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2])); lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0]; lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1]; lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2]; Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2); K[0][0]= KG[3][3];//DOF(7) K[0][1]= KG[3][4];//DOF(7) K[0][2]= KG[3][5];//DOF(7) K[1][0]= KG[4][3];//DOF(8) K[1][1]= KG[4][4];//DOF(8) K[1][2]= KG[4][5];//DOF(8) K[2][0]= KG[5][3];//DOF(9) K[2][1]= KG[5][4];//DOF(9) K[2][2]= KG[5][5];//DOF(9) Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); K[3][3]= KG[3][3];//DOF(10) K[3][4]= KG[3][4];//DOF(10) K[3][5]= KG[3][5];//DOF(10) K[4][3]= KG[4][3];//DOF(11) K[4][4]= KG[4][4];//DOF(11) K[4][5]= KG[4][5];//DOF(11) K[5][3]= KG[5][3];//DOF(12) K[5][4]= KG[5][4];//DOF(12) K[5][5]= KG[5][5];//DOF(12) Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1); K[0][0]+= KG[0][0];//DOF(7) K[0][1]+= KG[0][1];//DOF(7) K[0][2]+= KG[0][2];//DOF(7) K[1][0]+= KG[1][0];//DOF(8) K[1][1]+= KG[1][1];//DOF(8) K[1][2]+= KG[1][2];//DOF(8) K[2][0]+= KG[2][0];//DOF(9) K[2][1]+= KG[2][1];//DOF(9) K[2][2]+= KG[2][2];//DOF(9) K[3][3]+= KG[3][3];//DOF(10) K[3][4]+= KG[3][4];//DOF(10) K[3][5]+= KG[3][5];//DOF(10) K[4][3]+= KG[4][3];//DOF(11)
- 6. K[4][4]+= KG[4][4];//DOF(11) K[4][5]+= KG[4][5];//DOF(11) K[5][3]+= KG[5][3];//DOF(12) K[5][4]+= KG[5][4];//DOF(12) K[5][5]+= KG[5][5];//DOF(12) K[0][3]= KG[0][3];//DOF(7) K[0][4]= KG[0][4];//DOF(7) K[0][5]= KG[0][5];//DOF(7) K[1][3]= KG[1][3];//DOF(8) K[1][4]= KG[1][4];//DOF(8) K[1][5]= KG[1][5];//DOF(8) K[2][3]= KG[2][3];//DOF(9) K[2][4]= KG[2][4];//DOF(9) K[2][5]= KG[2][5];//DOF(9) K[3][0]= KG[3][0];//DOF(10) K[3][1]= KG[3][1];//DOF(10) K[3][2]= KG[3][2];//DOF(10) K[4][0]= KG[4][0];//DOF(11) K[4][1]= KG[4][1];//DOF(11) K[4][2]= KG[4][2];//DOF(11) K[5][0]= KG[5][0];//DOF(12) K[5][1]= KG[5][1];//DOF(12) K[5][2]= KG[5][2];//DOF(12) MatrixDetermination(K,NN); MatrixInverse(K,Kinv,NN);// Inverse [Kinit] MatrixMulti01(Kinv,F,u,NN); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2); ElementInternalForce(MS,u,lanX,lanY,eleF,0); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); ElementInternalForce(MS,u,lanX,lanY,eleF,1); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1); ElementInternalForce(MS,u,lanX,lanY,eleF,2); LANNDA[0]=(Ultimate_Moment-ABS(Mi[0]))/ABS(eleF[0][2]); LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]); LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]); LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]); LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]); LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]); LANNDA_min = MIN(LANNDA,6); for (i=0;i<NN;i++) u[i]=LANNDA_min*u[i]; Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,2); ElementInternalForce(MS,u,lanX,lanY,eleF,0); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); ElementInternalForce(MS,u,lanX,lanY,eleF,1); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,1); ElementInternalForce(MS,u,lanX,lanY,eleF,2); Mi[0]=eleF[0][2]; Mi[1]=eleF[0][5]; Mi[2]=eleF[1][2]; Mi[3]=eleF[1][5]; Mi[4]=eleF[2][2]; Mi[5]=eleF[2][5]; ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,1); for (i=0;i<NN;i++) output_u[1][i]=sum_u[i];//output displacement output_base[1]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7];//output base shear // So plastic hinge has formed in 3 node // SATAGE: 03 x[0] = 0;y[0] = 0; x[1] = Length;y[1] = 0; x[2] = 0+sum_u[0];y[2] = Height[0]+sum_u[1]; x[3] = Length+sum_u[3];y[3] = Height[1]+sum_u[4]; L[0] = SQRT2((x[2]-x[0])*(x[2]-x[0])+(y[2]-y[0])*(y[2]-y[0])); L[1] = SQRT2((x[3]-x[1])*(x[3]-x[1])+(y[3]-y[1])*(y[3]-y[1])); L[2] = SQRT2((x[3]-x[2])*(x[3]-x[2])+(y[3]-y[2])*(y[3]-y[2])); lanX[0] = (x[2]-x[0])/L[0];lanY[0] = (y[2]-y[0])/L[0]; lanX[1] = (x[3]-x[1])/L[1];lanY[1] = (y[3]-y[1])/L[1]; lanX[2] = (x[3]-x[2])/L[2];lanY[2] = (y[3]-y[2])/L[2]; Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4); K[0][0]= KG[3][3];//DOF(7) K[0][1]= KG[3][4];//DOF(7) K[0][2]= KG[3][5];//DOF(7) K[1][0]= KG[4][3];//DOF(8) K[1][1]= KG[4][4];//DOF(8) K[1][2]= KG[4][5];//DOF(8) K[2][0]= KG[5][3];//DOF(9) K[2][1]= KG[5][4];//DOF(9) K[2][2]= KG[5][5];//DOF(9) Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); K[3][3]= KG[3][3];//DOF(10) K[3][4]= KG[3][4];//DOF(10) K[3][5]= KG[3][5];//DOF(10) K[4][3]= KG[4][3];//DOF(11) K[4][4]= KG[4][4];//DOF(11) K[4][5]= KG[4][5];//DOF(11) K[5][3]= KG[5][3];//DOF(12) K[5][4]= KG[5][4];//DOF(12) K[5][5]= KG[5][5];//DOF(12) Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2); K[0][0]+= KG[0][0];//DOF(7) K[0][1]+= KG[0][1];//DOF(7) K[0][2]+= KG[0][2];//DOF(7) K[1][0]+= KG[1][0];//DOF(8) K[1][1]+= KG[1][1];//DOF(8) K[1][2]+= KG[1][2];//DOF(8) K[2][0]+= KG[2][0];//DOF(9) K[2][1]+= KG[2][1];//DOF(9) K[2][2]+= KG[2][2];//DOF(9) K[3][3]+= KG[3][3];//DOF(10) K[3][4]+= KG[3][4];//DOF(10) K[3][5]+= KG[3][5];//DOF(10) K[4][3]+= KG[4][3];//DOF(11) K[4][4]+= KG[4][4];//DOF(11) K[4][5]+= KG[4][5];//DOF(11) K[5][3]+= KG[5][3];//DOF(12) K[5][4]+= KG[5][4];//DOF(12)
- 7. K[5][5]+= KG[5][5];//DOF(12) K[0][3]= KG[0][3];//DOF(7) K[0][4]= KG[0][4];//DOF(7) K[0][5]= KG[0][5];//DOF(7) K[1][3]= KG[1][3];//DOF(8) K[1][4]= KG[1][4];//DOF(8) K[1][5]= KG[1][5];//DOF(8) K[2][3]= KG[2][3];//DOF(9) K[2][4]= KG[2][4];//DOF(9) K[2][5]= KG[2][5];//DOF(9) K[3][0]= KG[3][0];//DOF(10) K[3][1]= KG[3][1];//DOF(10) K[3][2]= KG[3][2];//DOF(10) K[4][0]= KG[4][0];//DOF(11) K[4][1]= KG[4][1];//DOF(11) K[4][2]= KG[4][2];//DOF(11) K[5][0]= KG[5][0];//DOF(12) K[5][1]= KG[5][1];//DOF(12) K[5][2]= KG[5][2];//DOF(12) MatrixDetermination(K,NN); MatrixInverse(K,Kinv,NN);// Inverse [Kinit] MatrixMulti01(Kinv,F,u,NN); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4); ElementInternalForce(MS,u,lanX,lanY,eleF,0); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); ElementInternalForce(MS,u,lanX,lanY,eleF,1); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2); ElementInternalForce(MS,u,lanX,lanY,eleF,2); LANNDA[0]=(Ultimate_Moment-ABS(Mi[0]))/ABS(eleF[0][2]); LANNDA[1]=(Ultimate_Moment-ABS(Mi[1]))/ABS(eleF[0][5]); LANNDA[2]=(Ultimate_Moment-ABS(Mi[2]))/ABS(eleF[1][2]); LANNDA[3]=(Ultimate_Moment-ABS(Mi[3]))/ABS(eleF[1][5]); LANNDA[4]=(Ultimate_Moment-ABS(Mi[4]))/ABS(eleF[2][2]); LANNDA[5]=(Ultimate_Moment-ABS(Mi[5]))/ABS(eleF[2][5]); LANNDA_min = MIN(LANNDA,6); for (i=0;i<NN;i++) u[i]=LANNDA_min*u[i]; Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,0,4); ElementInternalForce(MS,u,lanX,lanY,eleF,0); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,1,1); ElementInternalForce(MS,u,lanX,lanY,eleF,1); Matrix_Stiffness(EA,EI,L,lanX,lanY,AA,BB,CC,DD,EE,MS,KG,2,2); ElementInternalForce(MS,u,lanX,lanY,eleF,2); Mi[0]=eleF[0][2]; Mi[1]=eleF[0][5]; Mi[2]=eleF[1][2]; Mi[3]=eleF[1][5]; Mi[4]=eleF[2][2]; Mi[5]=eleF[2][5]; ELEMNT_FORCE_OUTPUT(eleF,ELE_FORCE,SUM_ELE_FORCE,u,sum_u,2); for (i=0;i<NN;i++) output_u[2][i]=sum_u[i];//output displacement output_base[2]=-SUM_ELE_FORCE[1]-SUM_ELE_FORCE[7];//output base shear // So plastic hinge has formed in 2 node MessageResult(output_base,output_u,3); MatrixDetermination(K,NN); OUTPUT_excel(output_u,output_base,ELE_FORCE,2); OUTPUT_html(Length,Height,EI,EA,Ultimate_Moment,output_u,output_base,ELE_FORCE,2); char text1[30]="Base Shear-Displacement Graph",text2[30]="Displacement [DOF(7)]",text3[30]="Base Shear [DOF(1)]+[DOF(4)]"; double X[2],Y[2]; for (i=0;i<2;i++){ X[i] = output_u[i][0];// Disp. DOF(7) Y[i] = output_base[i];// Base Shear DOF(1)+DOF(4) } OUTPUT_HTML_GRAPH(X,Y,2,text1,text2,text3); textcolor(15); printf("na - Output data is written in Excel and Html file -n"); DATE_TIME(); } void DATE_TIME(){ printf("nt"); system("echo %date%"); printf("t"); system("echo %time%"); } void Matrix_Stiffness(double EA,double EI,double L[],double lanX[],double lanY[],double A[],double B[],double C[],double D[],double E[],double K[][6],double K_G[][6],int I,int II){ double lan[6][6],lan_Tr[6][6],ans[6][6]; A[I] = 4*EI/L[I]; B[I] = 6*EI/(L[I]*L[I]); C[I] = 2*EI/L[I]; D[I] = 12*EI/(L[I]*L[I]*L[I]); E[I] = EA/L[I]; for (int i=0;i<6;i++) for (int j=0;j<6;j++) K[i][j] = 0; //I:2 number of element - II: kind of stiffness matrix if (II==1){// No plastic hinge K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0; K[1][0]=0;K[1][1]=D[I];K[1][2]=B[I];K[1][3]=0;K[1][4]=-D[I];K[1][5]=B[I]; K[2][0]=0;K[2][1]=B[I];K[2][2]=A[I];K[2][3]=0;K[2][4]=-B[I];K[2][5]=C[I]; K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0; K[4][0]=0;K[4][1]=-D[I];K[4][2]=-B[I];K[4][3]=0;K[4][4]=D[I];K[4][5]=-B[I]; K[5][0]=0;K[5][1]=B[I];K[5][2]=C[I];K[5][3]=0;K[5][4]=-B[I];K[5][5]=A[I]; } if (II==2){// plastic hinge at i K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0; K[1][0]=0;K[1][1]=.25*D[I];K[1][2]=0;K[1][3]=0;K[1][4]=-.25*D[I];K[1][5]=.5*B[I]; K[2][0]=0;K[2][1]=0;K[2][2]=0;K[2][3]=0;K[2][4]=0;K[2][5]=0; K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0; K[4][0]=0;K[4][1]=-.25*D[I];K[4][2]=0;K[4][3]=0;K[4][4]=.25*D[I];K[4][5]=-.5*B[I]; K[5][0]=0;K[5][1]=.5*B[I];K[5][2]=0;K[5][3]=0;K[5][4]=-.5*B[I];K[5][5]=(3/4)*A[I]; } if (II==3){// plastic hinge at j K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0; K[1][0]=0;K[1][1]=.25*D[I];K[1][2]=.5*B[I];K[1][3]=0;K[1][4]=-.25*D[I];K[1][5]=0; K[2][0]=0;K[2][1]=.5*B[I];K[2][2]=(3/4)*A[I];K[2][3]=0;K[2][4]=-.5*B[I];K[2][5]=0; K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0; K[4][0]=0;K[4][1]=-.25*D[I];K[4][2]=-.5*B[I];K[4][3]=0;K[4][4]=.25*D[I];K[4][5]=0; K[5][0]=0;K[5][1]=0;K[5][2]=0;K[5][3]=0;K[5][4]=0;K[5][5]=0; } if (II==4){// plastic hinge at i and j K[0][0]=E[I];K[0][1]=0;K[0][2]=0;K[0][3]=-E[I];K[0][4]=0;K[0][5]=0; K[1][0]=0;K[1][1]=0;K[1][2]=0;K[1][3]=0;K[1][4]=0;K[1][5]=0; K[2][0]=0;K[2][1]=0;K[2][2]=0;K[2][3]=0;K[2][4]=0;K[2][5]=0; K[3][0]=-E[I];K[3][1]=0;K[3][2]=0;K[3][3]=E[I];K[3][4]=0;K[3][5]=0; K[4][0]=0;K[4][1]=0;K[4][2]=0;K[4][3]=0;K[4][4]=0;K[4][5]=0; K[5][0]=0;K[5][1]=0;K[5][2]=0;K[5][3]=0;K[5][4]=0;K[5][5]=0; } lan[0][0]=lanX[I];lan[0][1]=lanY[I];lan[0][2]=0;lan[0][3]=0;lan[0][4]=0;lan[0][5]=0; lan[1][0]=-lanY[I];lan[1][1]=lanX[I];lan[1][2]=0;lan[1][3]=0;lan[1][4]=0;lan[1][5]=0;
- 8. lan[2][0]=0;lan[2][1]=0;lan[2][2]=1;lan[2][3]=0;lan[2][4]=0;lan[2][5]=0; lan[3][0]=0;lan[3][1]=0;lan[3][2]=0;lan[3][3]=lanX[I];lan[3][4]=lanY[I];lan[3][5]=0; lan[4][0]=0;lan[4][1]=0;lan[4][2]=0;lan[4][3]=-lanY[I];lan[4][4]=lanX[I];lan[4][5]=0; lan[5][0]=0;lan[5][1]=0;lan[5][2]=0;lan[5][3]=0;lan[5][4]=0;lan[5][5]=1; Matrix_Transpose(lan,lan_Tr); Matrix_Multiplication(lan_Tr,K,ans); Matrix_Multiplication(ans,lan,K_G); } void ELEMNT_FORCE_OUTPUT(double eleF[3][6],double ELE_FORCE[3][18],double SUM_ELE_FORCE[18],double u[],double sum_u[], int I){ int i; for (i=0;i<6;i++) ELE_FORCE[I][i]=eleF[0][i]; for (i=6;i<12;i++) ELE_FORCE[I][i]=eleF[1][i-6]; for (i=12;i<18;i++) ELE_FORCE[I][i]=eleF[2][i-12]; for (i=0;i<6*Ne;i++) SUM_ELE_FORCE[i] += ELE_FORCE[I][i]; for (i=0;i<NN;i++) sum_u[i] += u[i]; } double SQRT2(double D){ int it,itermax; double residual,tolerance,x,dx,dx_ABS,f,df; it = 0; // initialize iteration count itermax = 100000; residual = 100; // initialize residual tolerance = 1e-8; x = 1;// initialize answer while (residual > tolerance){ f = x*x - D; df = 2 * x; dx = f/df; x= x - dx; residual = ABS(dx); // abs residual it = it + 1; // increment iteration count //printf("f: %f -tdx: %f -tresidual: %fn",f,dx,residual); if (it == itermax){ //printf("tSQRT2(number,power) : SQRT2(%f) - iteration: %d -> ## The solution is not converged ##n",D,it); break; } } if (it < itermax){ //printf("tSQRT(number,power) - SQRT(%f,%f) : %f n",D,n, x); return x; } } void Matrix_Transpose(double A[6][6],double B[6][6]){ int i,j; for (i=0;i<6;i++) for (j=0;j<6;j++) B[j][i]=A[i][j]; } void Matrix_Multiplication(double A[6][6],double B[6][6],double C[6][6]){ int i,j,k; double sum; for (i=0;i<6;i++) for (j=0;j<6;j++){ sum=0; for (k=0;k<6;k++) sum += A[i][k]*B[k][j]; C[i][j] = sum; } } void MessageResult(double A[],double B[3][6],int n){ int i; printf("t "); for (i=0;i<147;i++) printf("-"); printf("n"); printf("t Increment Base Shear[DOF(1)]+[DOF(4)] Disp. [DOF(7)] Disp. [DOF(8)] Rotation [DOF(9)] Disp. [DOF(10)] Disp. [DOF(11)] Rotation [DOF(12)]n"); printf("t "); for (i=0;i<147;i++) printf("-"); printf("n"); for (i=0;i<n;i++) printf("tt %dtt %.3et %.3et%.3et %.3et %.3e %.3et %.3en",i+1,A[i],B[i][0],B[i][1],B[i][2],B[i][3],B[i][4],B[i][5]); } void OUTPUT_html(double Length,double Height[],double EI,double EA,double Ultimate_Moment,double A[3][6],double B[3],double C[3][18],int n){ // HTML OUTPUT int i; FILE *OutputFile; OutputFile = fopen("PushoverHingeByHingeMethodFrame-outputHTML.html", "w"); fprintf(OutputFile,"<html> <body bgcolor="green">n"); // IMPORT IMAGE fprintf(OutputFile,"<img src="PushoverHingeByHingeMethodFrame_image03.png" style="width:1000px ; height:500px" alt="analysis01"><br><br>n"); fprintf(OutputFile,"<img src="PushoverHingeByHingeMethodFrame_image01.png" style="width:1000px ; height:500px" alt="analysis01"><br><br>n"); fprintf(OutputFile,"<img src="PushoverHingeByHingeMethodFrame_image02.png" style="width:1000px ; height:500px" alt="analysis01"><br><br>n"); // TOP TITLE oF HTML FILE fprintf(OutputFile,"<table style=”width:100%” border="2px" width="1000px" height="120px" bgcolor="yellow">n"); fprintf(OutputFile,"<th bgcolor="cyan"> Nonlinear Analysis of Frame with Hinge by Hinge Method - Output Report </th> n"); // TABLE 1 fprintf(OutputFile,"<table style=”width:100%” border="1px" width="1200px" height="120px" bgcolor="yellow">n"); fprintf(OutputFile,"<tr><th colspan="2" bgcolor="orange"> Input Data </th> </tr>n"); fprintf(OutputFile,"<tr> <th bgcolor="orange">Length of Frame: </th><th> %.3e </th> </tr>n",Length); fprintf(OutputFile,"<tr> <th bgcolor="orange">Height of Column 1: </th><th> %.3e </th> </tr>n",Height[0]); fprintf(OutputFile,"<tr> <th bgcolor="orange">Height of Column 2: </th><th> %.3e </th> </tr>n",Height[1]); fprintf(OutputFile,"<tr> <th bgcolor="orange">Section flextural rigidity - EI: </th><th> %.3e </th> </tr>n",EI); fprintf(OutputFile,"<tr> <th bgcolor="orange">Section axial rigidity - EA: </th><th> %.3e </th> </tr>n",EA); fprintf(OutputFile,"<tr> <th bgcolor="orange">Section ultimate capacity moment: </th><th> %.3e </th> </tr>n",Ultimate_Moment); // TABLE 2 fprintf(OutputFile,"<table style=”width:100%” border="1px" width="1200px" height="120px" bgcolor="yellow">n"); fprintf(OutputFile,"<th colspan="7" bgcolor="orange"> Structral Deformation </th> n"); fprintf(OutputFile,"<tr> <th bgcolor="orange"> Increment </th> <th bgcolor="orange">Displacement [DOF(7)]</th> <th bgcolor="orange">Displacement [DOF(8)]</th><th bgcolor="orange">Rotation [DOF(9)]</th><th bgcolor="orange"> Displacement [DOF(10)] </th><th bgcolor="orange"> Displacement [DOF(11)] </th><th bgcolor="orange">Rotation [DOF(12)]</th></tr>n"); for(i=0;i<n;i++){ fprintf(OutputFile,"<tr> <td align ="center"> %d </td> <td align ="center"> %.3e </td> <td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td></tr>n",i+1,A[i][0],A[i][1],A[i][2],A[i][3],A[i][4],A[i][5]); } // TABLE 3 fprintf(OutputFile,"<table style=”width:100%” border="1px" width="2500px" height="120px" bgcolor="yellow">n"); fprintf(OutputFile,"<th colspan="19" bgcolor="orange"> Structral Internal Force </th> n"); fprintf(OutputFile,"<tr> <th bgcolor="orange"> Increment </th> <th bgcolor="orange">Ele.1 [DOF(1)]</th> <th bgcolor="orange">Ele.1 [DOF(2)]</th><th bgcolor="orange">Ele.1 [DOF(3)]</th><th bgcolor="orange"> Ele.1 [DOF(7)] </th><th bgcolor="orange"> Ele.1 [DOF(8)] </th><th bgcolor="orange">Ele.1 [DOF(9)]</th><th bgcolor="orange">Ele.2 [DOF(4)]</th> <th bgcolor="orange">Ele.2 [DOF(5)]</th><th bgcolor="orange">Ele.2 [DOF(6)]</th><th bgcolor="orange"> Ele.2 [DOF(10)] </th><th bgcolor="orange"> Ele.2 [DOF(11)] </th><th bgcolor="orange">Ele.2 [DOF(12)]</th><th bgcolor="orange">Ele.3 [DOF(7)]</th> <th bgcolor="orange">Ele.3 [DOF(8)]</th><th bgcolor="orange">Ele.3 [DOF(9)]</th><th bgcolor="orange"> Ele.3 [DOF(10)] </th><th bgcolor="orange"> Ele.3 [DOF(11)] </th><th bgcolor="orange">Ele.3 [DOF(12)]</th></tr>n"); for(i=0;i<n;i++){ fprintf(OutputFile,"<tr> <td align ="center"> %d </td> <td align ="center"> %.3e </td> <td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td><td align ="center"> %.3e </td></tr>n",i+1,C[i][0],C[i][1],C[i][2],C[i][3],C[i][4],C[i][5],C[i][6],C[i][7],C[i][8],C[i][9],C[i][10],C[i][11],C[i][12],C[i][13],C[i][14],C[i][15],C[i][16],C[i][17]); } // TABLE 4 fprintf(OutputFile,"<table style=”width:100%” border="1px" width="1000px" height="120px" bgcolor="yellow">n"); fprintf(OutputFile,"<th colspan="3" bgcolor="orange"> Absolute Base Shear-Displacement </th> n"); fprintf(OutputFile,"<tr> <th bgcolor="orange"> Increment </th> <th bgcolor="orange">Base Shear[DOF(1)]+[DOF(4)]</th><th bgcolor="orange">Displacement[DOF(7)]]</th></tr>n"); for(i=0;i<n;i++){ fprintf(OutputFile,"<tr> <td align ="center"> %d </td> <td align ="center"> %.3e </td><td align ="center"> %.3e </td></tr>n",i+1,ABS(B[i]),ABS(A[i][0])); } fprintf(OutputFile,"</table></body></html>n"); fclose(OutputFile); } void OUTPUT_HTML_GRAPH(double X[],double Y[],int n,char text1[],char text2[],char text3[]){ // HTML GRAPH OUTPUT int i; double x,y,Xnew[3],Ynew[3],NorX[3],NorY[3],Xmax,Ymax;
- 9. Xmax=MAX_ABS(X,n); Ymax=MAX_ABS(Y,n); Xnew[0]=0;Ynew[0]=0; for (i=0;i<n;i++){ Xnew[i+1] = ABS(X[i]); Ynew[i+1] = ABS(Y[i]); } for (i=0;i<n+1;i++){ NorX[i] = Xnew[i]/Xmax; NorY[i] = Ynew[i]/Ymax; //printf("t %f %f n",NorX[i],NorY[i]); } FILE *OutputFile; OutputFile = fopen("Graph-outputHTML.html", "w"); fprintf(OutputFile,"<!DOCTYPE HTML><html><body style="background-color:black;"><font color="white"><head><script> n"); fprintf(OutputFile,"window.onload = function(){ n"); fprintf(OutputFile,"var canvas = document.getElementById("myCanvas");var s1 = canvas.getContext("2d");var s2 = canvas.getContext('2d'); n"); fprintf(OutputFile,"var s3 = canvas.getContext("2d");var s4 = canvas.getContext("2d");var s5 = canvas.getContext("2d"); n"); fprintf(OutputFile,"var x=120,y=100,X,Y,Lx=1100,Ly=500,i; n"); fprintf(OutputFile,"s3.beginPath();s3.lineWidth = 3;s3.strokeStyle = "cyan";s3.rect(x,y,Lx,Ly); n"); fprintf(OutputFile,"for(i=0;i<9;i++){s3.moveTo(x+Lx*(i+1)*.1,y+Ly);s3.lineTo(x+Lx*(i+1)*.1,y+Ly-10);}; n"); fprintf(OutputFile,"for(i=0;i<9;i++){s3.moveTo(x,y+Ly*(i+1)*.1);s3.lineTo(x+10,y+Ly*(i+1)*.1);};s3.stroke();n"); fprintf(OutputFile,"s1.beginPath();s1.lineWidth = 3;s1.strokeStyle = "yellow"; n"); for (i=0;i<n;i++){ fprintf(OutputFile,"s1.moveTo(%f,%f);",120+NorX[i]*1100,100+500-NorY[i]*500); fprintf(OutputFile,"s1.lineTo(%f,%f); n",120+NorX[i+1]*1100,100+500-NorY[i+1]*500); } fprintf(OutputFile,"s1.stroke(); n"); fprintf(OutputFile,"s2.beginPath();s2.lineWidth = 1;s2.strokeStyle = "cyan";s2.setLineDash([5, 5]); n"); fprintf(OutputFile,"for(i=0;i<19;i++){s2.moveTo(x+Lx*(i+1)*.05,y);s2.lineTo(x+Lx*(i+1)*.05,y+Ly);} n"); fprintf(OutputFile,"s2.lineWidth = 1;s2.strokeStyle = "cyan";for(i=0;i<19;i++){s2.moveTo(x,y+Ly*(i+1)*.05);s2.lineTo(x+Lx,y+Ly*(i+1)*.05);} s2.stroke();n"); fprintf(OutputFile,"X=x+.25*Lx;Y=.7*y;s4.translate(X,Y);s4.font="50px serif";s4.fillStyle = "#7fff00";s4.fillText("%s",0,0); n",text1); fprintf(OutputFile,"s4.save();X=-X+.2*x;Y=-Y+y+.6*Ly;s4.translate(X,Y);s4.rotate(3*Math.PI/2);s4.font="15px serif"; n"); fprintf(OutputFile,"s4.fillStyle = "#7fff00";s4.textAlign = "left";s4.fillText("%s",0,0);s4.restore(); n",text3); fprintf(OutputFile,"s4.save();X=.2*Lx;Y=y+Ly-20;s4.translate(X,Y);s4.rotate(2*Math.PI);s4.font="15px serif";s4.fillStyle = "#7fff00"; n"); fprintf(OutputFile,"s4.textAlign = "left";s4.fillText("%s",0,0);s4.restore(); n",text2); for(i=0;i<10;i++){ x=.1*(i+1)*Xmax; fprintf(OutputFile,"s5.save();X=-.29*Lx+Lx*(%d+1)*.1;Y=.3*y+Ly+20;s5.rotate(2*Math.PI);s5.font="16px serif"; n",i); fprintf(OutputFile,"s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText("%.3e",X,Y);s5.restore(); n",x); } for(i=0;i<10;i++){ y=.1*(i+1)*Ymax; fprintf(OutputFile,"s5.save();X=-.28*Lx-50;Y=Ly+.3*y-Ly*(%d+1)*.1;s5.rotate(2*Math.PI);s5.font="16px serif"; n",i); fprintf(OutputFile,"s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText("%.3e",X,Y);s5.restore(); n",y); } fprintf(OutputFile,"s5.save();X=-.25*Lx;Y=.3*y+Ly+20;s5.rotate(2*Math.PI);s5.font="16px serif";s5.fillStyle = "#7fff00";s5.fillText(0,X,Y);s5.restore(); n"); fprintf(OutputFile,"s5.save();X=-.25*Lx-50;Y=Ly+.3*y;s5.rotate(2*Math.PI);s5.font="16px serif";s5.fillStyle = "#7fff00";s5.textAlign = "left";s5.fillText(0,X,Y);s5.restore();}; n"); fprintf(OutputFile,"</script></head><body><canvas id="myCanvas" width="1300" height="1300" style="border:1px solid black;"></canvas></body></html> n"); fclose(OutputFile); } double MAX_ABS(double A[],int n){ int i; double B[2]; double Amax; // abs value for (i=0;i<n;i++){ B[i] = A[i]; if(B[i] < 0) B[i] = -B[i]; } // Max of abs Amax = B[0]; for (i=1;i<n;i++){ if(Amax < B[i]) Amax = B[i]; } return Amax; }