
Recommended
Recommended
More Related Content
Similar to Combinational Filters.pptx
Similar to Combinational Filters.pptx (20)
More from Rakesh Pogula
More from Rakesh Pogula (6)
Recently uploaded
Recently uploaded (20)
Combinational Filters.pptx
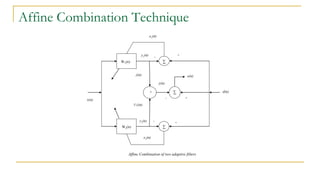
- 1. Affine Combination Technique Affine Combination of two adaptive filters W1(n) W2(n) + ∑ ∑ ∑ x(n) λ(n) 1-λ(n) y(n) y2(n) e2(n) y1(n) e1(n) d(n) e(n) + + + - - -
- 2. Contd… The outputs of the two filters are combined using the mixing parameter, λ(n). The overall output of the combined filter is given as where, This combination approach provides robustness against systems with varying degrees of sparsity and also achieves better performance than each of the combining filters separately.
- 3. Mixing Parameter, λ(n) The a priori error signal is defined as λ(n) is obtained by minimizing the mean square of the a priori error. The derivative of with respect to λ(n) is given by Setting the derivative to zero results in Exponential smoothing:
- 4. 𝑦 𝑛 = 𝒙𝑇(n)𝐰(𝑛) 𝑒 𝑛 = 𝑑 𝑛 − 𝑦(𝑛) The normalized LMS (NLMS) filter coefficient vector is updated according to where, 𝛼 𝑖𝑠 𝑡ℎ𝑒 𝑠𝑡𝑒𝑝 𝑠𝑖𝑧𝑒 To avoid division with zero, we add a small constant δ NLMS Adaptive Filter ) ( ) ( ) ( ) ( ) 1 ( 2 n x n e n x n w n w ) ( ) ( ) ( ) ( ) 1 ( 2 n x n e n x n w n w
- 5. Improved Proportionate-Normalized Least Mean Square (IPNLMS) Improved Proportionate NLMS (IPNLMS) Algorithm Initialization: Parameters: Error: Update: 1 L 0 i i l l (n) p L 1 (n) p (n) q ε h(n) 2 (n) h k) (1 2L k 1 (n) p 1 l l 1 k 1 k)/2L (1 2 x σ δIPNLMS
- 6. Comparison of NLMS, IPNLMS, CIPNLMS
- 7. Comparison of APA, IPAPA, CIPAPA 7