
Recommended
More Related Content
Similar to SQR_CSG_VI4x.pdf
Similar to SQR_CSG_VI4x.pdf (20)
More from Pourchet Jean Claude
Recently uploaded
Recently uploaded (20)
SQR_CSG_VI4x.pdf
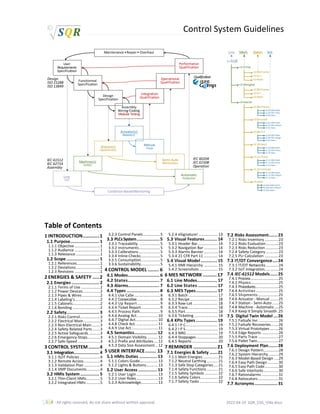
- 1. √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. 2022-04-19 SQR_CSG_VI4x.docx √𝑺𝑸𝑹 © Control System Guidelines Table of Contents 1 INTRODUCTION............1 Purpose....................... 1 1.1.1 Objective ........................1 1.1.2 Audience ........................1 1.1.3 Relevance.......................1 Scope .......................... 1 1.2.1 References......................1 1.2.2 Deviations.......................1 1.2.3 Revisions ........................1 2 ENERGIES & SAFETY .....2 Energies ...................... 2 2.1.1 Terms of Use ..................2 2.1.2 Power Devices................2 2.1.3 Pipes & Wires.................2 2.1.4 Labeling’s........................2 2.1.5 Cabinets..........................2 2.1.6 Bonding ..........................2 Safety.......................... 3 2.2.1 Risks Control...................3 2.2.2 Electrical Main................3 2.2.3 Non-Electrical Main........3 2.2.4 Safety Related Parts .......3 2.2.5 Active Safeguards...........3 2.2.6 Emergency-Stops............3 2.2.7 Safe-Speed .....................3 3 CONTROL SYSTEM........4 Integration.................... 4 3.1.1 IS/IT Policies ...................4 3.1.2 Remote Access ...............4 3.1.3 Validation Plan ...............4 3.1.4 VMP Documents.............4 HMIs System ............... 5 3.2.1 Thin-Client HMIs.............5 3.2.2 Integrated HMIs .............5 3.2.3 Control Panels................5 PLCsSystem.................. 5 3.3.1 Traceability ....................5 3.3.2 Instruments....................5 3.3.3 Calibrations....................5 3.3.4 Inline-Checks..................5 3.3.5 Consumption..................5 3.3.6 Sustainability..................5 4 CONTROL MODEL ........ 6 Modes......................... 6 States......................... 7 Alarms......................... 7 Types .......................... 8 4.4.1 Use CaSe ........................8 4.4.2 Consecutive......................8 4.4.3 Up Report .....................9 4.4.4 Ticket Report..................9 4.4.5 Process Path...................9 4.4.6 Analog Act....................10 4.4.7 Digital Act.....................10 4.4.8 Check Act. ....................11 4.4.9 Use Act.........................11 Semantics.................. 12 4.5.1 Domain Visibility ..........12 4.5.2 Prefix and Attributes....12 4.5.3 Data Size Assessment...12 5 USER INTERFACE........ 13 HMIs Duties .............. 13 5.1.1 Colors Guide.................13 5.1.2 Lights & Buttons...........13 User Access ............... 13 5.2.1 User Login....................13 5.2.2 User Roles....................13 5.2.3 Acknowledge................13 5.2.4 eSignature! .................. 13 Visual Features.......... 14 5.3.1 Header Bar................... 14 5.3.2 Navigation Bar ............. 14 5.3.3 Alarms Banner............. 14 5.3.4 21 CFR Part 11 ............. 14 Visual Model ............. 15 5.4.1 HMI Hierarchy ............. 15 5.4.2 Screenshots ................. 15 6 MES NETWORK ..........17 Line Modes................ 17 Line States ............... 17 MES Types................. 17 6.3.1 Batch ........................... 17 6.3.2 Recipe.......................... 18 6.3.3 Raw-Lot ....................... 18 6.3.4 Trace............................ 18 6.3.5 Part.............................. 18 6.3.6 Ticketing ...................... 18 KPIs Types................. 19 6.4.1 I P C.............................. 19 6.4.2 I P S.............................. 19 6.4.3 NRG ............................. 19 6.4.4 Stoppages.................... 20 6.4.5 Reports ........................ 20 7 REMINDER .................21 Energies & Safety ...... 21 7.1.1 Main Energies.............. 21 7.1.2 Neutral Earthing .......... 21 7.1.3 Safe Stop Categories.... 21 7.1.4 Safety Functions .......... 21 7.1.5 Safety Symbols ............ 22 7.1.6 Safety Colors................ 22 7.1.7 Safety Tasks................. 22 Risks Assessment....... 23 7.2.1 Risks Inventory.............23 7.2.2 Risks Evaluation............23 7.2.3 Risks Reduction ............23 7.2.4 Safety Category............23 7.2.5 PLr Calculation .............23 IT/OT Convergence.... 24 7.3.1 IT/OT Networks............24 7.3.2 IIoT Integration.............24 IEC-61512 Models...... 25 7.4.1 Process..........................25 7.4.2 Physics..........................25 7.4.3 Procedures......................25 7.4.4 Activities .....................25 7.4.5 Shipments ...................25 7.4.6 Actuator - Manual........25 7.4.7 Station - Semi-Auto......25 7.4.8 Machine - Automatic....25 7.4.9 Keep It Simply Smooth .25 Digital Twin Model ... 26 7.5.1 Failsafe Inn...................26 7.5.2 Failsafe Recoveries.......26 7.5.3 Virtual Prototypes ........26 7.5.4 Edge Reports................26 7.5.5 Parts Trace ...................27 7.5.6 Pallet Twin....................27 Deployment Plan....... 28 7.6.1 Design Pattern..............28 7.6.2 System Hierarchy .........29 7.6.3 Model-Based Design ....29 7.6.4 Easy Path Design ..........30 7.6.5 Easy Path Code.............30 7.6.6 Safe Interlocks..............30 7.6.7 Rationalarms................31 7.6.8 Ratiocators...................31 Acronyms .................. 31 +=SQR +1.Ss=... +1.00=Frame +1=Adm +1=Filler Act. Mach. Station Line +3.01.000=Path +3=Sealer +3.00=Frame +3.02=Load +2.Ss=... +2.00=Frame +2=Adm +2=Weigher +3.01.001=Robot +3.01.Aaa=... +3.00.000=Path +3.00.001=Train +3.00.Aaa=... +3.04=Fill +3.04.000=Path +3.04.001=Auger +3.04.Aaa=... +3.10=Seal +3.10.000=Path +3.10.001=Press +3.10.Aaa=... +3.12=Trace +3.12.000=Path +3.12.001=Print +3.12.Aaa=... +3.13=Unload +3.13.000=Path +3.13.001=Robot +3.13.Aaa=... +3=Adm +3.Adm.000=SAFE +3.Adm.001=PWUP +3.Adm.Aaa=... User Requirements Specification Design Specification Assembly Wiring-Coding Modular Testing Condition-BasedMonitoring Maintenance •Repair• Overhaul Line Cell Actuator(s) Module(s) Manual FixUp Integration Qualification Station(s) Equipment(s) Semi-Auto Maintenance Operational Qualification Functionnal Specification Machine(s) Unit(s) Automatic Production Performance Qualification Design ISO 15288 ISO 13849 IEC 61512 IEC 62714 Assembly IEC 60204 IEC 61508 Operation Qualifcation
- 2. √𝑺𝑸𝑹 © INTRODUCTION Control Systems Guidelines 1 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 1 INTRODUCTION Purpose 1.1.1 Objective Guidelines to ensure user Safety, product Quality and machinery Reliability with Industrial Control Systems. Few paths to apply Machinery Directives and Good Automation Modeling Practices on Industrial Control Systems aggregatingmodules suchas Actuators , Stations and Machines in Line(s) for batch’s production. 1.1.2 Audience OEM's Industrial Control Systems stakeholders trained on the following §1.2.1 References. 1.1.3 Relevance User Safety Product Quality Machinery Reliability Cyber Security Process Mastering For new Industrial Control Systems only, existing ones are out of scope. Concerns Holistic Matrix Chapters ISO / IEC GAMP IS / IT Ready MES / IIoT Ready • Energies & Safety Blue . . . • Control System Yellow Green • Control Model Purple • User Interface Green • MES Network . . . Purple The right border color in the next pages shows which chapter paragraph is relevant to which concern. Scope 1.2.1 References • MD-2006/42/CE, Essential health and safety requirements relating to design and construction of machinery. • ISO-9241:2010, Ergonomics of human-system-interaction - Human-centered design for interactive systems. • ISO-12100:2010, Safety of machinery - General Principles for Design - Risk Assessment and Reduction. • ISO-13849-1:2015, Safety of machinery - Safety related Parts of Control Systems - Part 1: Principles. • ISO-13849-2:2012, Safety of machinery - Safety related Parts of Control Systems - Part 2: Validation. • ISO-13850:2015, Safety of machinery - Emergency Stop Function - Principles for Design. • ISO-13855:2010, Safety of machinery - Safeguards position with respect to approach speeds of parts of human body. • ISO-14118:2017, Safety of machinery - Prevention of Unexpected StartUp. • ISO-14119:2013, Safety of machinery - Guards Interlocking Devices Associated - Design and Selection Principles. • ISO-15288:2015, Systems and software engineering - System life cycle processes. • ISO-27000:2018, Information technology - Information security - management systems - Overview and vocabulary. • IEC-60068-1:2013, Environmental testing - Part 1: General and guidance. • IEC-60204-1:2016, Safety of machinery - Electrical equipment of machines - Part 1: General requirements. • IEC-60300-1:2014, Dependability management - Part 1: Guidance for management and application. • IEC-61131-3:2013, Programmable controllers - Part 3: Programming languages. • IEC-61508:2010, Functional safety of electrical/electronic/programmable electronic safety-related systems. • IEC-61512-1:1997, Batch control - Part 1: Models and terminology. • IEC-62061-A2:2015, Safety of safety-related electrical, electronic and programmable electronic Control Systems. • IEC-62264-1:2013, Enterprise Control Systems Integration - Part 1: Models and terminology. • IEC-62443-3-3:2013, Industrial communication networks, system security requirements and security levels. • IEC-62682-1:2014, Management of alarms systems for the process industries. • IEC-62714-1:2018, Engineering data exchange Pattern - Automation markup language. • IEC-81346-2:2019, Reference designations - Part 2: Classification of objects and codes for classes. • ISPE-GAMP, Good Practice Guide: A Risk-Based Approach to Compliant GxP Computerized Systems. • S88 Implementation Guide, Strategic Automation for process Industries - ISBN-10 0070216975. 1.2.2 Deviations Each deviation with any statement written in this document needs a project team approval and validation. 1.2.3 Revisions m.μ.ε Date Author Auditor Modifications Description I.0.x 28 Feb. 2018 JCP PoP from CPA Draft I.1.x 30 Sep. 2018 JCP VeP from CDI MES Network I.2.x 11 Nov. 2019 JCP JCR from DCS Control System + Semantics + eSignature! I.3.x 27 June 2020 JCP VeP from CDI Control Model + Up + Ticket + Analog + Digital I.4.x 31 May 2021 JCP JCR from DCS IEC-61512 Models + Digital Twin + Deployment
- 3. √𝑺𝑸𝑹 © ENERGIES & SAFETY Control Systems Guidelines 2 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 2 ENERGIES & SAFETY Energies Where machinery is powered by source of Energies, it must be so designed, constructed and equipped as to avoid all potential risks associated with such sources, i.e. MD-2006/42/CE; their supplies and distributions shall be able to retain electrical, hydraulic and pneumatic hazards vs Safety Requirements. 2.1.1 Terms of Use The devices, connectors, pipes and wires shall comply with IEC-60068-1:2013 versus their environments and operative uses with a life cycle 10 years as : • Ingress Protection Indoor Areas - IP2X Outdoor Areas - IP65 • Temperature °C +10°C to +40°C -0°C to +50°C • Relative Humidity 20…90% 5…95% • Vibration / Shock 1g / 10g 2g / 30g • Contact / Air Discharges 1 kV / 2 kV • ATEX‘s requirements if exposed to explosive or combustible areas. 2.1.2 Power Devices Those PDS shall comply with IEC-60204-1:2016; a supply isolator (breaker with overcurrent protection) shall let disconnect each one. The electrical devices such asmotors,drivesorVFD'sshallavoidconnectionbetweenneutralandPEbonding. 2.1.3 Pipes & Wires Conduits, Tubes, Pipes, Wires and Cables shall comply with IEC-60204-1:2016 : • Leave more than 25 mm between electrical and non-electrical pipes. • Avoid shearing, crushing, sharp edges, rough surfaces and cutting threads. • Ensure PE bonding in metallic sheaths and DC-control separation to AC-power. • Adopt open mesh on cable trays or basket without cover; minimize, where possible, horizontal cable trays to reduce dust/debris accumulation; install pipes and wires on a single layer with single clipping (no cables grouping). • Seal conduits ends or install cable glands on both sides (silicon is forbidden). • Grant hydraulic or pneumatic conduits, tubes or pipes that resist over 50% of their nominal pressure without leakage or detachment. 2.1.4 Labeling’s SystemmarkingplatesshallcomplywithMD-2006/42/CE.Cabinets,devices,pipes and wires labels shall comply with IEC-60204-1:2016 and IEC-81346-2:2019 : • Label or engrave each cabinet on the door or front cover. • Label every device in and out of cabinets as tagged in the drawings. • Label pipes and wires at each termination point as tagged in the drawings. • For all items, set labels to comply with tags in the associated drawings like "+01.002-B3=Fct " with "+" for location, "-" for device and "=" for function. 2.1.5 Cabinets The control and termination cabinets as their devices layouts and cables trays shall comply with IEC-60204-1:2016 and IEC-81346-2:2019 : • Locate all live parts ≥ 60 V inside enclosures, not on opening door or covers. • For doors or covers hiding live parts ≥ 60 V, LOCK them with special tools or keys - HIGHLIGHTthemwithelectricalwarningstickers-CHECKtheiropeningangle≥90°. • Fulfill EMC/EMI immunity with a bonded metal divider (plate, grid or mesh) or insure 100 mm free space between devices < 60 V and devices ≥ 60 V. • Seal conduits ends or install cable glands on both sides (silicon is forbidden). • Ensure PE bonding continuity with metallic connectors and cable glands. • Enter the conduits by the bottoms or sides (not by top, front or back). • Provide two power receptacles or sockets with electrical protection. • Fulfill Electrical Main Switch and Non-Electrical Main Valves. • Adopt stainless steel for the cabinet's enclosures. 2.1.6 Bonding Protective Earth equipotential bonding shall comply with IEC-60204-1:2016 : • Share selected Neutral Earthing methods at the electrical main supply. • Identify PE conductors with GREEN-YELLOW or any combination of these. • Make sure impedance between PE bonding and structural parts is ≤ 50 m. • Ensure PE bonding continuity in all metallic cables sheaths or armoring. • Segregate PE, Neutral VAC and 0 VDC in every cabinet and cable tray. • Do not use system structural parts as PE bonding conductors.
- 4. √𝑺𝑸𝑹 © ENERGIES & SAFETY Control Systems Guidelines 3 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx Safety Machinery shall be designed and constructed so that it is fitted for its function, and can be operated, adjusted and maintained without putting persons at risk when these operations are carried out under the conditions foreseen but also under any reasonably foreseeable misuse thereof, i.e. MD-2006/42/CE. Safety design steps are①InherentlySafeDesign,②ActiveSafeguardsand③InformationofUse. 2.2.1 Risks Control As defined in ISO-12100:2010, the SRP/CS designs (ISO-13849-1:2015) and validations (ISO-13849-2:2012) shall reach the eligible PLr and category. The shared Risks Inventory, Risks Evaluation and Risks Reduction shall be done by actuators or energies; If irreversible injuries are foreseeable, SRP/CS shall rank Safety Category #3 or #4 with PLdor PLe insteadof invoking Information-of-Use. 2.2.2 Electrical Main It shall comply with IEC-60204-1:2016 and ISO-14118:2018 to filter, isolate and disconnect any electrical energies with following protective features : • Locate all live parts ≥ 60 V inside enclosures, not on opening door or covers. • 3-Phase + Neutral EMC/EMI filter and overload protection at the main drop. • The I/0n and 0/0ff labels shall indicate the switch positions (power status). • The I/0n position shall keep the main cabinet door closed unless authorized skilled or instructed persons use a tool or key to bypass it for maintenance. • The 0/0ff position (disconnected state) can be mechanically lock with padlock or trapped-key to prevent any unexpected StartUp. 2.2.3 Non-Electrical Main For all pneumatic or hydraulic supplies, provide dirt filter, overload protection, isolation switch and quick disconnect; add to each of them 0n-0ff valves with a gradual pressure build-up in downstream position (soft-start / quick exhaust). 2.2.4 Safety Related Parts The SRP/CS such as Active-Safeguards, Emergency-Stops or Deadman Switch shall comply with IEC-61508:2010 and IEC-62061-A2:2015 and provide : • Every related paper, specification, certificate, drawing, use and manual. • Energies retainment strategies if Safeguards failures or emergency stop(s). • Safety Reset to reset Active-Safeguards or Emergency-Stops without initiating hazardous operation; only one true feedback from Safeguards Interlock may enable the 0n to energize and initiate unsafe actuators. • Safety Functions with redundant certified actuators such as Deadman Switch. • Redundant Air and Hydraulic Valves to cut unsafe non-electrical actuators. • Redundant 3-Phase Electrical Breakers to cut unsafe electrical actuators. • Only physical buttons shall perform 0ff , Reset and 0n . 2.2.5 Active Safeguards The Active-Safeguards shall prevent any potential hazardous motion and comply with ISO-13855:2010, ISO-14119:2013 and IEC-60204-1:2016 : • They refer to such as Guard-Interlocks, presence sensors or light curtains. • Only Two-Hand or Deadman Switches may mute Active-Safeguards to enable the Redundant-Certified-Actuators while all Unsafe-Actuators remain disable. • Presence-Sensors or Light-Curtains Muting shall complywith ISO-13849-1:2015. • The fixed or moveable Guard-Interlocks shall submit an escape mean for anyone trapped inside; padlocks or trapped-keys shall secure inappropriate guards closing; irreversible fasteners shall avoid any work-around. 2.2.6 Emergency-Stops They shall comply with IEC-60204-1:2016 and ISO-13850:2015; nothing can bypass Emergency-Stops ; they shall prevent hazardous motion versus one of the Safe Stop Categories. Their Locations shall prevent accidental pushing and not be placed next to an 0ff push-button. The supplier shall provide layouts with their Locations and which device(s) they control. 2.2.7 Safe-Speed To run under cooperative motion speed while Muting Active-Safeguards; such JogSafe Mode shall comply with the Safety Functions Safety-Limited-Speed : • Nominal or slow-motion speed if nobody inside the Active-Safeguards. • Safe-Speed under the control of a Deadman switch if anybody inside. • Safe-Stop if Safeguards or Deadman switch are not active.
- 5. √𝑺𝑸𝑹 © CONTROL SYSTEM Control Systems Guidelines 4 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 3 CONTROL SYSTEM An ICS aggregates HMIs and PLCs to control machinery; every system device shall : • Provide electronic Crash-Recovery backups on IS/IT approved media storages. • Integrate HardWare/SoftWare pieces approved by the original vendor ONLY. • Replace HW/SW pieces before their obsolescence or security support end. Integration It address system data sharingthrough OPC-UA onL2-Asynchrone-Network. The Industrial Automation & Control System shall provide OPC-UA authentication with certificates set by OPC-GDS Push (Global Discovery Server) and implement OPC-UA authorization, if the IACS requires User Roles based on User Login. 3.1.1 IS/IT Policies They address Security-Level #2 or #3 vs ISO-27000:2018 and IEC-62443-3-3:2013. Every device on L2-Asynchrone-Network or public cellular network (like xG) shall : • Apply security fixes under the following SLO if CVSS ≥ 7 in the last CVE: • 1 week for systems on public cellular network (like xG). • 11 weeks for systems on L2-Asynchrone-Network. • Report once a year following information for every asset : • IP address, Systems & Applications names, User's roles and credentials. • Security support end date by original software vendors and by suppliers. • List of applicable patches required to fix CVSS ≥ 7 for all installed devices. • Update once a year firmware, operating system and software with latest fixes. • Change once a year every Psw/Pin with uncompromising credentials policies. 3.1.2 Remote Access 2 choices to keep an Industrial Control System secure while accessing it remotely : • First an SSL-VPN, up to the line Asset-Hub using proper credentials like SQR-Adm. • As second choice, a Teams screen sharing as immediate tactical solution where nothing occurs without a local SQR-Adm user session. 3.1.3 Validation Plan The VMPmarksthe beginningof any qualificationproject;it schedules allGAMP's tasks in a risk-based assessment versus product quality and project milestones : IACS Milestones URS Review + FMEA Functional Review Design Specification PLC & HMI Coding RCM Ready Modules Tests Integration Tests Operational Tests Performance Tests FAT Ready 1 st Run Successful Qualification Ready IQ-OQ-PQ Support FAT Successful SAT Ready Offline Online Release GAMP‘s VMP Documents HDS V0 DRW V0 SDS V0 PRG V0 T4Q V0 HDS V1 DRW V1 SDS V1 PRG V1 T4Q V1 HDS V2 DRW V2 SDS V2 PRG V2 T4Q V2 HW SW QC HW SW QC HW SW QC 3.1.4 VMP Documents Those listed in the Validation Plan shall demonstrate that all systems comply with MD-2006/42/CE directives endorsing ISO-15288:2015 and GAMP's where : • All tags, aliases and faceplates match the P&IDn drawings names. • Hardware drawings and Labeling’s comply with IEC-81346-2:2019. • Design patterns may endorse good practices such as IEC-62714-1:2018. • All tags, mnemonics, descriptions, comments and instructions are in English. Tests shall provide Risk-Assessment, I/O, Parameters, Reports and Alarms lists. Theyshallbereadableonloose-leafprintofsizeA4orLetterwithdurablequality. SQR Adm Asset Hub SQR WAN SSL VPN 3rd Party Computer SQR Adm
- 6. √𝑺𝑸𝑹 © CONTROL SYSTEM Control Systems Guidelines 5 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx HMIs System The HMIs requirements are split in two chapters; this one describes how to integrate IT/OT Networks; the next User Interface chapter describes Duties, User Access, Visual Features and Visual Model for the visualization application. 3.2.1 Thin-Client HMIs To integrate the L2-Asynchrone-Network if database access is required. IT provides HMIsHardwareandOperatingSystem. ITshall validatethevisualization software. Any Not IT validated software requires a risk assessment to identify risks versus IT security. The visualization application shall integrate User Access Active Directory while its life cycle management shall be set-up to ensure compatibility with IS/IT Policies validated hardware and software roadmap. The project tool shall handle multiple targets held by multiple programmers. 3.2.2 Integrated HMIs To integrate the L1-Synchrone-Network, they shall provide the User Login feature for operators, leaders and experts; Their IP address may be in IT range like 10.63.x.y or in private ranges such as 192.168/16 and 172.16/16. 3.2.3 Control Panels All Stack-lights and Pushbuttons shall comply with IEC-60204-1:2016, see §User Interface Lights & Buttons. If any hazardous operation may cause irreversible injuries, every control panel shall be Wired by Hardware. PLCs System In addition, the supplier shall integrate PLCs with the following features : • Minimum of 20% spare for PLC memory, I/O and Tags Quantities. • A safety logic (hardware or software) to control Safety Related Parts. • The PLCs shall allow a remote access for diagnostic and troubleshooting through the L1-Synchrone-Network with one of their own Ethernet ports; IP address shall be in IT ranges as 10.63.x.y or in 192.168/16 and 172.16/16. • A separate Ethernet port using a different IP address with potential IO-Link gateways shall access to the L0-Synchrone-Fieldbus (IP address range is free). The project tools shall handle multiple targets held by multiple programmers and comply with IEC-61131-3:2013 for ST, LD or FBD programming languages. 3.3.1 Traceability The PLCs system shall provide Parts Trace and Pallet Twin features to build a unique E2E traceable part identifier for the Shipments. The Serialization shall record contextual part’s data (configurations, parameters, reports, status, timestamps, contents, authentications, etc...) through Ticketing’s. Unique 1D or 2D barcodes, RFID chips or alphanumeric texts may identify each part. A Product is a part that completes every process stage without any failure. See §Control Model Ticket Type, §MES Network Trace Type and Part Type. 3.3.2 Instruments 3.3.3 Calibrations They act as Actuators and those tied to CPPs, CQAs or OPRPs shall belong to an approved instruments list, other choices require individual approvals; their monitoring’s may require an §MES Network Typ_IPC. Their calibration certificates and maintenance/validation plans are required; if calibration is not applicable, a gauge R&R (repeatability & reproducibility) is required. 3.3.4 Inline-Checks 3.3.5 Consumption Some Instruments may require ICC Inline Calibration Checks with Traced Challenge-Parts to control their calibration validities; those checks may occur in Running States with mandatory Holds from IPS Inline Process Samplings. The Inline-Checks also include energies consumption monitoring’s (Electricity in KWh or Air Pressure in m3, etc...) as defined in §MES Network NRG Type. 3.3.6 Sustainability As cited in IEC-60300-1:2014, the Control System shall share Condition-Based Monitoring's (CBM) with the MES Network to collect and contextualize edge reports valuable for production improvement as for Maintenance, Repair & Overhaul (MRO); such data may establish trends, predict failures and prescribe corrective actions; this curative dependability management is more efficient for Safety, Quality & Reliability (SQR) than classical Palliative Maintenances.
- 7. √𝑺𝑸𝑹 © CONTROL MODEL Control Systems Guidelines 6 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 4 CONTROL MODEL A Model-Based Design, as MVC pattern, submits machinery control models based on building blocks; the benefits of such methods are Failsafe Recoveries, Virtual Prototyping’s and Productivity Gains. Key Modes, States, Alarms, Types andSemantics guide with relevant clues to integrate IACS in manufacturing lines over an MES Network. A rational class design model may translate a physical system to its Digital Twin by sinking FailsafeandEdge-Reports in relevant Base Class . Modes Those apply totally to Machines and partially to Stations and Actuators . Control Modes Access Description compliant with IEC-60204-1:2016. IEC-60204-1:2016 Modes Production Automatic Oper. It produces parts during periods dedicated to ordered Batch’s;MES synchronizes the Reportsand Recipe. Every Up shall run in full Automatic mode. Maintenance Semi-Auto Leader It produces parts without any Batch constraints and allows MRO for tuning or testing. It permits Ticket’s and/or Up‘s bypass as Limp Mode even in Run state. Manual FixUp Expert It provides deep control on all modules for FixUp if the Active-Safeguards retain the known hazards. It forbids Run state compared to Maintenance. Sub-modes tied to IEC modes Empty Line Oper. Consecutively Empty each system one by one in the line.Empty process interruptioncanoccur anytime. Empty One Oper. Empty one system and stop with Empty signal sent to MES. Empty process interruption can occur anytime. Clean Wash Oper. Cleaning process as specified by factory operation procedure; an Empty mode is required before. Setup Check Oper. RecipesettingorinstrumentscalibrationinvolvingInline- Checks;anEmptymodeisrequiredbeforeanewbatch. Slow Run Leader It reduces the system running rate to balance line stream rate (to be aligned to the bottleneck rate). Once Run Leader It cycles the system one by one with the 0n button pushedeachtime by operator before runningagain. Limp Run Leader It allows the system to run while bypassing some Up‘s or disabling some parts Ticket‘s (*). Dry Run Expert It allows the system to run without parts or Ticket‘s to validate logics or to warm-up (*). JogSafe Expert Safe-Limited-Speed while muting Active-Safeguards. See §SAFETY Safe-Speed conditions for any detail (*). FailSafe Expert Switch controls to be as tolerant as possible to likely failure with Actuator's Failsafe-Inn logics (*). Sleep Oper. Switching-0ff Unsafe-Actuators (Electrical & Air) after a pre-defined delay without producing parts. • The IEC Modes are mutually exclusive (Production, Maintenance, Manual). • Theothersarenotmutuallyexclusive, buttheyaretiedtoone IECModeatatime. (*) means “this mode can be set from Maintenance or Manual modes only”. KPIs KQIs 1...* Act_Actuator Act_Instrument M_SS_AAAInst... M_SS_AAA Act... M_ Machine 0...* specialization Mgr_Report 1...* baseclass MESserver Admin Cfg_ Par_ Ctl_ Sts_ Rep_ Alm_ Network MES Sts MES Ctl M_SS Station 1...* 0...* specialization Mgr_Usecase Mgr_AlmRCA baseclass base class Mgr_Upreport baseclass Mgr_Ticketreport baseclass 1...* Parts Paths specialization baseclass specialization baseclass Safe Interlocks 0...* 0...* Ticketing Mgr_Consecutive base class
- 8. √𝑺𝑸𝑹 © CONTROL MODEL Control Systems Guidelines 7 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx States Those apply totally to Machines and partially to Stations and Actuators . Control States Stop Cat. Description compliant with IEC-60204-1:2016. Interlocking Safeguards Produce Run Starting Produce Parts for the ordered Batch‘s even under alerts like predict-warn or prescribe-alert . It ends due to an Alarm occurrence or an 0ff button push. Pause Pausing Cat. #2 Halt due to a system external product-pause . Self- back to run when the outer request disappears. Hold Holding Cat. #2 Halt due to a system internal product-hold . Self- back to run when the inner request disappears. Stopped Cat. #2 Maintain process-cycle end, waiting for Starting by an 0n buttonpushor E-Stoppingby an 0ff button push. Stopping Initiate process-cycle ending due to an 0ff button push or process-fail and then go to Stopped state. StartUp Dueto process-break or an 0n, set thesystem ready for the last ordered Batch after visual-acoustic alerts. Safe Access Reset Interlock Safeguards and energize without hazardous motion to enable the 0n button for StartUp. E-Stopped Cat. #0 Unlock Safeguards when energies are retained. If Safeguards are closed, push Reset button for Reset. E-Stopping Cat. #1 Immediate stop due to safeguard(s) unlocked or system-crash ; go to E-Stop under retained energies. • A single push on button 0ff Stops the system and, from Stop state, another push retains Unsafe-Actuators Energies before Unlocking Safeguards. • A Reset button push clears all Alarms and interlocks all Safeguards without hazardous motion; then a Safeguards feedback enables the button 0n. • The initial push on button 0n StartUps the system to reach Stop state, then a 2nd push or a "keep pressed" makes the system to run for producing. Alarms An IACS shall detect alarms to rationally reveal hazards. Contextual Stoppages data improve Root Cause Analysis for faster troubleshooting. Some alarms may reject a part/product (i.e. Ticket Fail status tied to CPPs or CQAs) andmay require additional acknowledgment with single [!] or double [!!] eSignature!. Rationalization compatible with IEC-62682-1:2014. Stop Category to correct cause Current States Priority# of Alarm E-Stop StartUp Stop Hold Pause Run System States Effect Action Acknow. Acquit Access #1 - System Crash E-Stop 0/1 #2 - Process Break StartUp 2 #3 - Process Fail Stop 2 #4 - Product. Hold Hold 2 #5 - Product. Pause Pause 2 #6 - Predict Warn No Issue N/A #7 - Prescribe Alert No Issue N/A It displays rationalized messages in Alarms Banner at machine and station levels. #3_ 3_02_002 _B0:0, Load Grab Sensor Fail ! Dec. 24 • 08:11:47 Multilingual text + eSignature! Multiformat Time Stamp Device Code vs IEC-81346-2:2019, see Stoppages for details. P&IDn to localize the Alarm Origin vs _Machine#_Station#_Actuator#. Priority# of the Alarm such as Crash, Break, Fail, Hold, Pause, Warn or Alert. Interlocking Safeguards Safe Access // I I E-Stopped E-Stopping Run Pause Hold-to-Run Start Reset Manual StartUp Safe Stopped Stopping
- 9. √𝑺𝑸𝑹 © CONTROL MODEL Control Systems Guidelines 8 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx Types They network data in the PLC vs modules types - Machine , Station or Actuator . Attribute Type Description vs linked IEC-61512 Models such as .M. .S. .A. InOut Net_... Typ_... To NETWORK relevant data outside a system. _MES Typ_MES Refer with MES to Ctl-Sts system data. _KPIs Typ_KPIs Refer with KPI's FROM module(s) TO line. _Tkg Typ_Tkg Refer with Ticketing to push-pull line Part(s). Adm_... Typ_... To SHARE global data inside the system. _Use Typ_Use Refer with Use CaSe logic, i.e. sequencer. _Ups Typ_Up[n] Refer with Up(s) of station edge reports. _Tks Typ_Tk[n] Refer with Part's Ticket(s) edge reports. Cfg_... TBD[n] To FIX system settings into module. Inpu t Par_... TBD[n] To TUNE system values into module. Ctl_... TBD[n] To SET case/state into module. _Inp TBD[n] Pull signals from physics. Output Rep_... TBD[n] To SEE edge values from module. Sts_... TBD[n] To GET case/state from module. _Reps Typ_Rep[n] Module Reports values. _Alms Typ_Alm[n] Module Alarms monitoring. _Cons Typ_Cons[n] Module Consecutive events. _Out TBD[n] Push signals into physics. 4.4.1 Use CaSe It manages a Use CaSe logic for Machines or Stations ; one module owns only one instance. It manages states and attributes for a sequential procedural logic. Attribute Type Description _.Cfg_Act BOOL Fix equipment to be active. _.Cfg_Safe BOOL Fix safe interlock for Easy-Path. _.Cfg_Unsafe BOOL Fix unsafe if manual action from HMI. _.Cfg_Failsafe BOOL Fix failsafe for Easy-Path (i.e. recovery). _.Cfg_Jog BOOL Fix jog-speed or step-by-step. _.Ctl_Jog BOOL Set jog-speed or step-by-step request. _.Par_Tmr DINT Tune equipment response time. _.Par_Ctl DINT Tune equipment added control. _.Ctl_Seq DINT Set next sequencer step. _.Ctl_State DINT Set next state. _.Sts_State DINT Get current state. _.Sts_FailID DINT Get failure Identifier. _.Sts_Lagg DINT Get slowest sequencer step. _.Sts_Seqp DINT Get past sequencer step. _.Sts_Seq DINT Get current sequencer step. _.Rep_Tmr DINT See use response time value. _.Sts_StateOns BOOL Get state change status. _.Sts_SeqOns BOOL Get sequencer change status. _.Sts_Failsafe BOOL Get failsafe condition status. _.Sts_NoAlm BOOL Get while no alarm pending. _.Sts_Estop BOOL Get E-Stop/Crash status (I.e. for Easy-Path recovery). _.Sts_Done BOOL Get time-out after a control change, Sts_StateOns. _.Sts_Safe BOOL Get safe status for Easy-Path. _.Sts_End BOOL Get end status. _.Sts_Jog BOOL Get jog status. 4.4.2 Consecutive It manages consecutive occurrences monitoring; in a positive way, it may define the rate before enabling an output (i.e. lubrication); in a negative way, it may define how many times an actuator can fail before rising relevant Alarms. [#].Attribute Type Description (may expose multiple instances) _.Cfg_Clear BOOL Fix clear, initialize every report. _.Par_Cons DINT Tune occurrence quantity to set consecutive status. _.Ctl_Prod BOOL Set each time a product cycle begins. _.Ctl_Cons BOOL Set each time a consecutive occurs. _.Ctl_Rst BOOL Set Reset, FROM global logic TO alarm logic. _.Rep_CtrProd LINT See production ticks count since last report clear. _.Rep_CtrCons LINT See consecutive count since last report clear. _.Rep_Cons DINT See current consecutive occurrence count. _.Rep_OEE DINT See Overall-Equipment-Effectiveness. _.Sts_AlmOns BOOL Get alarm occurrence threshold, rise only. _.Sts_NoAlm BOOL Get while no alarm pending. _.Sts_Prod BOOL Get production tick threshold. _.Sts_Cons BOOL Get consecutive reached.
- 10. √𝑺𝑸𝑹 © CONTROL MODEL Control Systems Guidelines 9 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 4.4.3 Up Report A Station combines all devices required to perform a fragment of a process; each station on the Process Path may upgrade Part(s) with one or more Up’s; it manages the Reports to monitor one process made by one station Up. [#].Attribute Type Description (may expose multiple instances) _.Typ_Use Typ_Use Refer with the linked Use CaSe logic instance. _.Typ_Recipes Typ_Recipe[ID,Up,n] Refer with the Global values. Update each time RecipeID changes _.Typ_Params DINT[n] Refer with the Local parameters. _.Cfg_Clear BOOL Fix clear, initialize every report. _.Cfg_RecipeID DINT Fix Recipe identifier to produce the current Part. _.Cfg_UpID DINT Fix current station Up identifier. _.Cfg_NxtID DINT Fix next station Up identifier. _.Sts_FailID DINT Get module/part Failure Identifier. _.Sts_State DINT Get current state from tied Use CaSe. _.Rep_TmrProd LINT See producing time since last report clear. _.Rep_TmrFail LINT See failure time since last report clear. _.Rep_CtrProd LINT See product count since last report clear. _.Rep_CtrFail LINT See failure count since last report clear. _.Rep_MTTF LINT See Mean-Time-To-Fail. _.Rep_MTtR LINT See Mean-Time-To-Repair. _.Rep_OEE DINT See Overall-Equipment-Effectiveness. _.Rep_Tmr DINT See last response time value. _.Sts_NoAlm BOOL Get station Up without alarm. _.Sts_Enable BOOL Get station Up is useful (no bypass). _.Sts_Lagg BOOL Get station Up is lagging all (too slow). _.Sts_Prod BOOL Get station Up is producing (not failed yet). _.Sts_Fail BOOL Get station Up has failed (fail-code in Sts_FailID). _.Sts_End BOOL Get station Up is complete. _.Sts_ICC BOOL Get Inline-Calibration-Checks with Challenge-Part. _.Sts_Jog BOOL Get station Up jog. 4.4.4 Ticket Report It acts as a token for Traceability to trace a Part at each Station Up through the whole Process Path; it may twin a fixture, mover, nest, puck, pipe or any kind of carriers; it manages the Reports for 𝑃𝑟𝑜𝑑𝑢𝑐𝑡 = 𝑃𝑎𝑟𝑡 𝐶𝑜𝑚𝑝𝑙𝑒𝑡𝑒. See §Reminder Parts Trace and Pallet Twin for an implementation synoptic. [#].Attribute Type Description (may expose multiple instances) _.Typ_Up Typ_Up Refer Station Up in front of the Part’s Ticket. _.Typ_Tks Typ_Part[n] Refer with the data of Parts loaded in the Tickets. Typ_Path[n] Refer with Process Path for Parts to complete a product. _.Typ_TkIDs DINT[n] Refer with the Circular Buffer tied to part Ticket’s IDs. _.Cfg_Clear BOOL Fix clear, initialize every report. _.Cfg_LastUp BOOL Fix last Station Up for the part (end of process). _.Sts_RecipeID DINT Get Recipe identifier to produce the current Part. _.Sts_PartID DINT Get Part identifier as discriminator in the Batch. _.Sts_NxtID DINT Get next station Up identifier. _.Sts_FailID DINT Get module/part Failure Identifier. _.Sts_TkID DINT Get part Ticket identifier in the Circular buffer. _.Rep_TmrProd LINT See producing time since last report clear. _.Rep_TmrFail LINT See failure time since last report clear. _.Rep_CtrProd LINT See product count since last report clear. _.Rep_CtrFail LINT See failure count since last report clear. _.Rep_MTTF LINT See Mean-Time-To-Fail. _.Rep_MTtR LINT See Mean-Time-To-Repair. _.Rep_OEE DINT See Overall-Equipment-Effectiveness. _.Rep_Tmr DINT See last response time value. _.Sts_InProd BOOL Get part Ticket is in Production Mode. _.Sts_Enable BOOL Get part Ticket is useful (not bypass). Shall be used to open/close ticket _.Sts_Used BOOL Get part Ticket is in use (not free). _.Sts_Prod BOOL Get part Ticket is producing (ongoing work without fail). _.Sts_Fail BOOL Get part Ticket is failed (with fail-code in Sts_FailID). _.Sts_End BOOL Get part Ticket synchronized with end of Station Up. _.Sts_ICC BOOL Get Inline-Calibration-Checks with Challenge-Part. _.Sts_OK BOOL Get ticket ready to run the Station Up process . 4.4.5 Process Path It maps Part’s consecutives Stations Up‘s and Use’s to complete a process that build a product; consider that 𝑃𝑟𝑜𝑑𝑢𝑐𝑡 = 𝐶𝑜𝑚𝑝𝑙𝑒𝑡𝑒𝑙𝑦 𝑃𝑟𝑜𝑐𝑒𝑠𝑠𝑒𝑑 𝑃𝑎𝑟𝑡 [#].Attribute Type Description (may expose multiple instances) _.Next-Up DINT[n] Set the next station Up after the current station Up. _.Next-Use DINT[n] Set the next Up Use (may be Inline-Calibration-Checks).
- 11. √𝑺𝑸𝑹 © CONTROL MODEL Control Systems Guidelines 10 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 4.4.6 Analog Act. It manages an analog imperative logic ( Actuator only, no sequential logic). Attribute Type Description _.Cfg_Minimum DINT Fix minimum range value. _.Cfg_Maximum DINT Fix maximum range value. _.Cfg_InpWidth DINT Fix in-position width. _.Cfg_JogRatio DINT Fix Jog Speed ratio versus nominal one. _.Cfg_Safe BOOL Fix safe interlock from adjacent actuators (i.e. Easy-Path). _.Cfg_Failsafe BOOL Fix Failsafe, simulate input vs response time. _.Cfg_NoAlm BOOL Fix Alarms muting, no alarm status on failures. _.Cfg_Mirror BOOL Fix Mirroring, set output as an image of input. _.Cfg_Clear BOOL Fix Reports clearing, initialize edge values. _.Par_Tmr DINT Tune actuator response time. _.Par_Ctl DINT Tune actuator added control. _.Ctl_Out DINT Set Output, FROM global logic TO local logic. _.Ctl_Inn DINT Set Input, FROM physical input TO local logic. _.Ctl_Hold BOOL Set immediate stop or hold-to-run situation. _.Ctl_Rev BOOL Set Reverse Speed in JogSafe motion. _.Ctl_Jog BOOL Set Jog Speed for setup or JogSafe motion. _.Ctl_Rst BOOL Set Reset, FROM global logic TO alarm logic. _.Rep_TmrProd LINT See producing time since last report clear. _.Rep_TmrFail LINT See failure time since last report clear. _.Rep_CtrProd LINT See product count since last report clear. _.Rep_CtrFail LINT See failure count since last report clear. _.Rep_MTTF LINT See Mean-Time-To-Fail. _.Rep_MTtR LINT See Mean-Time-To-Repair. _.Rep_OEE DINT See Overall-Equipment-Effectiveness. _.Rep_Tmr DINT See current response time value. _.Sts_Ante BOOL Get current position is before setpoint. _.Sts_Post BOOL Get current position is behind setpoint. _.Sts_Rev BOOL Get current speed is reverse. _.Sts_Jog BOOL Get current speed is in JogSafe motion. _.Sts_CtlOns BOOL Get control change threshold, rise and down. _.Sts_AlmOns BOOL Get alarm occurrence threshold, rise only. _.Sts_NoAlm BOOL Get while no alarm pending. _.Sts_Alm0 BOOL Get alarm if Ctl_Out=0 and Ctl_Inp=1 after time-out. _.Sts_Alm1 BOOL Get alarm if Ctl_Out=1 and Ctl_Inp=0 after time-out. _.Sts_Done BOOL Get time-out after a control change, Sts_CtlOns. _.Sts_Safe BOOL Get safe interlock for adjacent actuators (i.e. Easy-Path). _.Rep_Out DINT See output, FROM local logic TO physical output. _.Rep_Inn DINT Get input, FROM local logic TO global logic. _.Sts_Inp BOOL Get in-position, FROM local logic TO global logic. 4.4.7 Digital Act. It manages a digital imperative logic ( Actuator only, no sequential logic). Attribute Type Description _.Cfg_Safe BOOL Fix safe interlock from adjacent actuators (i.e. Easy-Path). _.Cfg_Failsafe BOOL Fix Failsafe, simulate input vs response time. _.Cfg_NoAlm BOOL Fix Alarms muting, no alarm status on failures. _.Cfg_Mirror BOOL Fix Mirroring, set output as an image of input. _.Cfg_Clear BOOL Fix Reports clearing, initialize edge values. _.Par_Tmr DINT Tune actuator response time. _.Par_Ctl DINT Tune actuator added control. _.Ctl_Out BOOL Set Output, FROM global logic TO local logic. _.Ctl_Inp BOOL Set Input, FROM physical input TO local logic. _.Ctl_Rst BOOL Set Reset, FROM global logic TO alarm logic. _.Rep_TmrProd LINT See producing time since last report clear. _.Rep_TmrFail LINT See failure time since last report clear. _.Rep_CtrProd LINT See product count since last report clear. _.Rep_CtrFail LINT See failure count since last report clear. _.Rep_MTTF LINT See Mean-Time-To-Fail. _.Rep_MTtR LINT See Mean-Time-To-Repair. _.Rep_OEE DINT See Overall-Equipment-Effectiveness. _.Rep_Tmr DINT See current response time value. _.Sts_CtlOns BOOL Get control change threshold, rise and down. _.Sts_AlmOns BOOL Get alarm occurrence threshold, rise only. _.Sts_NoAlm BOOL Get while no alarm pending. _.Sts_Alm0 BOOL Get alarm if Ctl_Out=0 and Ctl_Inp=1 after time-out. _.Sts_Alm1 BOOL Get alarm if Ctl_Out=1 and Ctl_Inp=0 after time-out. _.Sts_Done BOOL Get time-out after a control change, Sts_CtlOns. _.Sts_Safe BOOL Get safe interlock for adjacent actuators (i.e. Easy-Path). _.Sts_Out BOOL Get output, FROM local logic TO physical output. _.Sts_Inp BOOL Get input, FROM local logic TO global logic.
- 12. √𝑺𝑸𝑹 © CONTROL MODEL Control Systems Guidelines 11 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 4.4.8 Check Act. It manages a check imperative logic ( Actuator only, no sequential logic). Attribute Type Description _.Cfg_Safe BOOL Fix safe interlock from adjacent actuators (i.e. Easy-Path). _.Cfg_Failsafe BOOL Fix Failsafe, simulate input vs response time. _.Cfg_NoAlm BOOL Fix Alarms muting, no alarm status on failures. _.Cfg_Mirror BOOL Fix Mirroring, set output as an image of input. _.Cfg_Clear BOOL Fix Reports clearing, initialize edge values. _.Par_Tmr DINT Tune actuator response time. _.Par_Chk DINT Tune actuator check time. _.Par_Ctl DINT Tune actuator added control. _.Ctl_Trig BOOL Set Change-of-State Trigger, FROM global logic TO local logic. _.Ctl_CoS BOOL Set Check Change-of-State, FROM global logic TO local logic. _.Ctl_Off BOOL Set Check Off, FROM global logic TO local logic. _.Ctl_On BOOL Set Check On, FROM global logic TO local logic. _.Ctl_Done BOOL Set Done, FROM global logic TO local logic. _.Ctl_Inp BOOL Set Input, FROM physical input TO local logic. _.Ctl_Rst BOOL Set Reset, FROM global logic TO alarm logic. _.Rep_TmrProd LINT See producing time since last report clear. _.Rep_TmrFail LINT See failure time since last report clear. _.Rep_CtrProd LINT See product count since last report clear. _.Rep_CtrFail LINT See failure count since last report clear. _.Rep_MTTF LINT See Mean-Time-To-Fail. _.Rep_MTtR LINT See Mean-Time-To-Repair. _.Rep_OEE DINT See Overall-Equipment-Effectiveness. _.Rep_Tmr DINT See current response time value. _.Sts_CtlOns BOOL Get control change threshold, rise and down. _.Sts_AlmOns BOOL Get alarm occurrence threshold, rise only. _.Sts_NoAlm BOOL Get while no alarm pending. _.Sts_Alm0 BOOL Get alarm if Ctl_Out=0 and Ctl_Inp=1 after time-out. _.Sts_Alm1 BOOL Get alarm if Ctl_Out=1 and Ctl_Inp=0 after time-out. _.Sts_Done BOOL Get time-out after a control change, Sts_CtlOns. _.Sts_Safe BOOL Get safe interlock for adjacent actuators (i.e. Easy-Path). _.Sts_Fail BOOL Get failed check, FROM local logic TO global logic. _.Sts_Inp BOOL Get input, FROM local logic TO global logic. 4.4.9 Use Act. It manages Sequential logic for a Smart Actuator or an Aggregate of them. Attribute Type Description _.Cfg_Safe BOOL Fix safe interlock from adjacent actuators (i.e. Easy-Path). _.Cfg_Failsafe BOOL Fix failsafe for Easy-Path (i.e. recovery). _.Cfg_ExoAlm BOOL Fix Alarms externally managed (i.e. from the tied sequencer). _.Cfg_NoAlm BOOL Fix Alarms muting, no alarm status on failures. _.Cfg_Clear BOOL Fix Reports clearing, initialize edge values. _.Cfg_Jog BOOL Fix jog-speed or step-by-step. _.Par_Tmr DINT Tune equipment response time. _.Par_Ctl DINT Tune equipment added control. _.Ctl_Jog BOOL Set jog-speed or step-by-step request. _.Ctl_Seq DINT Set next sequencer step. _.Ctl_State DINT Set next state. _.Sts_State DINT Get current state. _.Sts_Seqp DINT Get past sequencer step. _.Sts_Seq DINT Get current sequencer step. _.Rep_TmrProd LINT See producing time since last report clear. _.Rep_TmrFail LINT See failure time since last report clear. _.Rep_CtrProd LINT See product count since last report clear. _.Rep_CtrFail LINT See failure count since last report clear. _.Rep_MTTF LINT See Mean-Time-To-Fail. _.Rep_MTtR LINT See Mean-Time-To-Repair. _.Rep_OEE DINT See Overall-Equipment-Effectiveness. _.Rep_Tmr DINT See current response time value. _.Sts_StateOns BOOL Get state change status. _.Sts_SeqOns BOOL Get sequencer change status. _.Sts_Failsafe BOOL Get failsafe condition status. _.Sts_NoAlm BOOL Get while no alarm pending. _.Sts_Alm0x BOOL[n] Get alarms if Ctl_State.0 without feedback after time-out. _.Sts_Alm1x BOOL[n] Get alarms if Ctl_State.1 without feedback after time-out. _.Sts_Estop BOOL Get E-Stop/Crash status (I.e. for Easy-Path recovery). _.Sts_Done BOOL Get time-out after a control change, Sts_StateOns. _.Sts_Safe BOOL Get safe interlock for adjacent actuators (i.e. Easy-Path). _.Sts_End BOOL Get end status. _.Sts_Jog BOOL Get jog status.
- 13. √𝑺𝑸𝑹 © CONTROL MODEL Control Systems Guidelines 12 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx Semantics Based on MSDN General Naming Conventions. • USE Pascal case notation, NOT Hungarian; AVOID conflict with codingkeywords. • USE an English noun or statement to designate modules and/or features. • CAST easily readable designations and PROMOTE simplicity and directness. 4.5.1 Domain Visibility The domain defines the tags visibility as Public-Global or Private-Local. Public Tag (global visibility) Private Tag (local visibility) _Tag = " _M_Ss " + " Private_Tag " Ex: " _1_02_003_Check.Sts_End “ _Tag = " Aaa " + "Feature.Attribute" Ex: " _003_Check.Sts_End " _M for machine ID _Ss for station ID _Aaa for actuator ID 4.5.2 Prefix and Attributes Prefix_Suffix-Attributes Description Dir. _Ack Acknowledge As an alarm acknowledgment (i.e. eSignature!). Act_ _Act Actuator To REFER with a control module. InOut Adm_ _Adm Administrate To SHARE data anywhere in one system. InOut _Alc Alarm Cause To sign a Root Cause vs P&IDn and device code. _Alm Alarm Message To sign crash, break, fail, hold, pause, warn, alert _Ana Analog Limited To sign an analog limited device (i.e. Act_). _Ang Analog Angular To sign an analog modulo device (i.e. Act_). Cfg_ _Cfg Configuration To FIX system settings in the logic. Input _Chk Check Feature To sign check feature as Challenge-Part (i.e. Act_). _Chx Check eXtended To sign extended check as feeder level (i.e. Act_). _Clear Clear Reports To sign clear of reports (i.e. Cfg or Ctl). _Cons Consecutive To sign consecutive process failures. Ctl_ _Ctl Control-Cmd To SET case/state in the logic. Input _Ctr Counter To increment numerical data. _Dgt Digital Feature To sign elementary digital device (i.e. Act_). _Dgx DigitaleXtended To sign extended digital device (i.e. Act_). _Dly Digital Delay To sign delayed digital device (i.e. Act_). _Done Overtime To sign running timer is done. _End Complete To sign last feature has ended. _Fail Failure To sign failed product versus Alarm. _Failsafe Failsafe As failsafe mode (recoveryoremulation). _ICC ICC Checks As Inline Calibration Check (i.e. Mgr_). _...ID Identifier To sign multiple identifiers (i.e. Array). _Inp Input To pull physical input from control device. _IPC KPI Control As Inline Process Control (i.e. Mgr_). _IPS KQI Sample As Inline Process Sampling (i.e. Mgr_). _Jog JogSafe To sign JogSafe motion or step-by-step. _Log Login "User" To sign User Login linked to credentials. _MES M.E.S. As Manufacturing Execution System. Mgr_ _Mgr Manager To MANAGE basic procedural module features. InOut _Mode Mode To sign the chosen mode of the logic. Net_ _Net Network To NETWORK IPC, IPS, Stoppages, Trace with MES. InOut _NRG Energies As energies monitoring recorder (i.e. Act_). _OEE O.E.E. As Overall Equipment Effectiveness (I.e. Reports). _Ons Once Shot To sign a change threshold, rise and/or down. _Out Output To push physical output to control device. Par_ _Par Parameter To TUNE system values in the logic. Input _Part Part Data To trace a part (i.e. Traceability). Rep_ _Rep Report To SEE edge values out of the logic. Output _Rst Reset To sign a reset for acknowledged alarms. _...s Array of ... To sign data array (one or more axises). _Safe Safe Interlock To sign safe with adjacent modules for Easy-Path. _Seq Sequencer To sign a step in a sequential logic. _Spg Sampling To sign a Sampling device as IPS-ICC (i.e. Act_). _SRP Safety As SafetyRelatedPartsofControlSystem(i.e.SRP/CS). _State State To sign the chosen state of the logic. _Str String To sign alphanumeric characters chain. Sts_ _Sts Status To GET case/state out of the logic. Output Tmr_ _Tmr Timer To TIME stamp by clock/Tick or related data. InOut _Tk Part Ticket To share part tokens and report Traceability. Typ_ _Typ User Data Type To REFER with data structures going In & Out modules. InOut _Up Station Up To share Up of station reports (single track). _Use Use CaSe To use a procedural module or smart device. 4.5.3 Data Size Assessment Applications data assessment lets size application memory, see Ratiocators. • Tags Quantity = Core_tags + Process_tags (Spare > 20%) = GuardQty x 184 tags + (StationQty + UpQty) x 272 tags • I/O Quantity = Core_I/O + Process_I/O (Spare > 20%) = GuardQty x 16DI•8DO + UpQty x 16DI•8DO•3AI•2AO "DI" Digital Input - "DO" Digital Output - "AI" Analog Input - "AO" Analog Output.
- 14. √𝑺𝑸𝑹 © USER INTERFACE Control Systems Guidelines 13 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 5 USER INTERFACE HMIs Duties The interface between users and Control System shall be designed and realized such that no person is endangered during all intended use and reasonable foreseeable misuse of the machine. The interface ergonomic shall be easy to use so the user is not tempted to act in hazardous manners, i.e. ISO-13849-1:2015. 5.1.1 Colors Guide It shall comply with IEC-60204-1:2016, see §Reminder Safety Colors. Colors Line Machine Station Actuator Alarms Red Abort E-Stop In Alarm Crash Yellow Complete-ClearUp-Idle StartUp - Stop Stop – 0ff Break - Fail Blue - Hold Jog Alarm Ack. Hold Green Run Run – 0n Warn - Alert White/Black Pause Failsafe Pause 5.1.2 Lights & Buttons They shall comply with IEC-60204-1:2016, see §Control System Control Panels. Active Safeguards States Stack-Lights Pushbuttons If hazard cause irreversible injuries Disable SRP/CS E-Stop Flashing Red Enable SRP/CS Safe-Reset Steady Continuous Check on all Safety Related Parts of Control System to ensure user's Safeguards StartUp Flashing Yellow Stop Steady Hold Flashing Blue Pause Run Flashing Steady Green Horn in StartUp if unable to see all. Buzzer Flash in Reset or Stop states - Steady in Run. 0n Button Light Flash in E-Stop state or if an Alarm is pending. Reset Button Light Flash in Run or Stop state - Steady in E-Stop. 0ff Button Light The flashing pushbuttons induce user action to Run, Reset or Stop the system. Any hazard able to cause irreversible injuries induce PHYSICAL pushbuttons. User Access The IS/IT Policies require regular passwords changes. A centrally managed user's credentials as Active Directory reduces time for password updates. 5.2.1 User Login The IS/IT Networks credentials domain manages user's names and passwords. • This function is robust, fast and easy to use as company-badges or ID-cards. • Auto-logout after a delay of inactivity and switch to Access Guest Level #3. 5.2.2 User Roles HMIs Features Users see next HMI Hierarchy Expert Leader Operator Guest (*) one machine may control the entire Line also. Levels #0 #1 #2 #3 • Select languages, dates and units formats. • Access to the 0ff buttons and the Machine Screens (*). Access to the Reset and 0n buttons. x Select Machine reports, modes and states (*). x Control machine recipe parameters and configurations. x x • Access to the sub-system (Stations or Actuators) Screens. x Select sub-systems reports and status. x Control sub-systems recipe parameters and states. x x • Control sub-systems setting parameters and configurations. x x x Control IS/IT Policies in the Control System. x x x 5.2.3 Acknowledge 5.2.4 eSignature! User's credentials acknowledgments with Electronic Signature provide audit trail for Parameters or Alarms tied to CPPs, CQAs or OPRPs that may alter the product; only alarms with priority #1 , #2 or #3 may have signable acknowledgments : • Double eSignature !! requires BOTH Operator AND Leader credentials. • Single eSignature ! requires ONLY one Operator OR one Leader credentials. • No eSignature if Parameters or Alarms are NOT tied to CPPs, CQAs or OPRPs. // I
- 15. √𝑺𝑸𝑹 © USER INTERFACE Control Systems Guidelines 14 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx Visual Features The visualization application shall comply with the human centered features as guided in ISO-9241:2010; the next sections may describe how to apply those. 5.3.1 Header Bar This screen area shall display the following information : • Manufacturing ID's of current Batch and Recipe. • Multilingual selected text (or English) and Multiformat dates/units. • User Login versus User Roles with an auto-logout (potentially user’s ID merge). • Screen Title based on P&IDn, with the role and task of the device under focus. Line SQR_Line • Line Task... SQR_ N/A N/A N/A Machine SQR_3_Sealer • Machine Task... ' ' _3_ N/A N/A Station SQR_3_00_Frame • Station Task... ' ' ' ' in ISO- 9241: 2010 and N/A Actuator SQR_3_00_031_Energy • Actuator Task… ' ' ' ' ' ' _031 _ • Date & Time (The IS/IT Networks time service synchronizes every HMI and a Clock Update Tools synchronizes HMIs and PLCs date and time). • Current Modes of the Line and the Machine in focus. 5.3.2 Navigation Bar The Visual Model shall give an intuitive navigation to find any information with no more than 3 clicks through a visualization application based on a flat design. Left Bar to select machinery level Right Bar to select contextual task To see the current Batch and Recipe. To expose Modes of a module in focus. To focus on the Line, also use as Home Screen. To expose States of a module in focus. To focus on a Machine. To expose Reports of a module in focus. To focus on a Station. To expose diagnostics of a module in focus. To focus on an Actuator. To expose Recipes of a module in focus, with potential eSignature! To send screenshot to anyone anywhere. To expose settings of a module in focus. To select Machine(s) Stoppages causes. To expose Machine(s) Alarms or alerts, with potential eSignature! 5.3.3 Alarms Banner This screen area shall toggle between Alarms Banner and Alarms Screen. The messages merging Alarms attributes shall switch between local language and English. Note Single [!] or double [!!] eSignature! in case of altered process. [Stoppages] "Priority - Mach-Station-Act - Code - Description - Date&Time" [Alarms] 5.3.4 21 CFR Part 11 Optionally, Electronical Records and Signatures may comply with the FDA: Audit Trail Topics Traceable Storage Descriptions MES Types Batch, Recipe, and Raw-Lot logs. Login / Logout User Access occurrences recapitulation. System Events Modes, States, Alarms and eSignature! logs. Product Traceability Push/Pull transactions for Ticketing to Trace each Part. ConfigurationChanges Exhaustive recipe parameters & system settings logs.
- 16. √𝑺𝑸𝑹 © USER INTERFACE Control Systems Guidelines 15 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx t Visual Model The visual HMI shall display any information with no more than three clicks. 5.4.1 HMI Hierarchy The HMI shall adopt the same hierarchical model as its linked PLC architecture. In a Model–View–Controller (MVC) pattern, the HMI layout matches its System Hierarchy; this mapping provides design agility and intuitive navigation with active-stickers on 3D picture to select modules under focus. The MVC design pattern frames software modules to allow parallel design and efficient code reuses. The NAMUR’s MTP-POL provides similar paradigm. 5.4.2 Screenshots The next examples may guide an implementation of the previous features : • Line Modes • Line States • Machine Modes • Machine States • Machine Reports • Machine Parameters Guest Level #3 Line "Cell" View Controller Model Updates Reads Writes Events Machine "Unit" Machine "Unit" OperatorLevel #2 Station "Equip." Station "Equip." Station "Equip." Leader Level #1 Actuator "Module" Actuator "Module" Actuator "Module" Actuator "Module" Actuator "Module" Actuator "Module" Actuator "Module" Expert Level #0 Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Production Production Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Modes Modes "Batch" SQR_Line Modes _1_Molder NoAlm 87% _2_Dryer NoAlm 86% _3_Sealer Alm 85% "Free" Manual "MRO" Maintenance Production Setup Clean Empty Production N/A Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_Line States Run Abort Complete Idle ClearUp Pause _1_Molder NoAlm 87% _2_Dryer NoAlm 86% _3_Sealer Alm 85% States Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Production Production Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Modes Modes SQR_3_Sealer Modes _3_Sealer Machine Run _10_Seal NoAlm 98% _02_Load Alm 105% _13_Unload NoAlm 109% _00_Frame NoAlm 114% _04_Fill NoAlm 98% _12_Trace NoAlm 109% "Automatic" "FixUp" Manual "Semi-Auto" Maintenance Production Setup Clean Empty Limp Run Once Run Slow Run Sleep JogSafe Dry Run Production Production Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_Sealer States _10_Seal NoAlm 98% _00_Frame NoAlm 114% _04_Fill NoAlm 98% _12_Trace NoAlm 109% _3_Sealer Machine Run States _02_Load Alm 105% _13_Unload NoAlm 109% Run Hold Estop Reset Stop StartUp Pause // I I Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_Sealer Reports Rate Nominal Current Average [part/min] 60 60 57 Report Select Batch Shift Used Used Time [hour] 883.4 6541.2 7358.8 Prod. Time [hour] 882.9 6534.3 7257.8 Used Parts [part] 3040518 21637474 23906830 Prod. Parts [part] 3009968 21420562 23664979 Fail. Parts [part] 30545 216949 241888 M.T.T.F. [sec] 104 108 108 M.T.t.R. [sec] 0 0 1 Availability % 100 100 99 Performance % 96 92 91 Quality % 99 99 99 OEE % 96 92 89 100% 96% 99% Availability Performance Quality Reports _3_Sealer Machine Run [part/Rate] [minute] Work in Progress Time Line Batch Real Time Overall Equipment Effectiveness Batch 08 06 07 09 05 10 04 11 03 12 02 14 0 1 4 1 0 7 1 3 0 2 1 2 0 3 1 1 0 4 1 0 0 5 0 9 13 01 0 6 0 8 Full Fail OFF Lagg Station Up Part Ticket ON Alm #1 #4 #2 #3 Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_Sealer Parameters Parameters _3_Sealer Machine Run Batch ID Recipe ID GTIN 123456789 Chateleu 3092718605339 Expiration Raw-Lots ID Quantity 2020-Dec-24 SQR191224 4'000'000 Raw-Lot [0] Raw-Lot [1] Raw-Lot [2] NFL-43210 NFL-54321 NFL-54321 Raw-Lot [3] Raw-Lot [4] Raw-Lot [5] NFL-65432 NFL-87654 NFL-98765 Batch ID Recipe ID Product GTIN 123456789 Chateleu 3092718605339 Expiration Product SSCC - S/NHigh-digits Part ID - S/NLow-digits 2020-Dec-24 SQR191224.- -.3'009'969 Product Time Print Device Check Device 2019-Dec-24 _3_12_001_Print _3_12_002_Check Batch OK Recipe OK Batch OK SSCC OK Raw-Lot OK Control Status Control Status MES Trace OK OK
- 17. √𝑺𝑸𝑹 © USER INTERFACE Control Systems Guidelines 16 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx • Machine Stoppages • Machine Alarms • Machine Configurations • Station Configurations • Station Parameters • Station Status • Station Reports • Actuator Reports • Station States • Actuator States Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Production Production Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Modes SQR_3_Sealer Stoppages Free Cause Due to vacation Materials Lack Labor Lack Demand Lack MRO Cause Due to maintenance Warm-Up Labor Stoppage Check-Up Repair Overhaul Maintenance Clean Setup Empty Batch Cause Due to production _3_Sealer Machine Stop Stoppages User Control Status User Control Status OK OK #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 User Control Status OK Unplanned Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes ! eSignature !! eSignature SQR_3_Sealer Alarms Alarms _3_Sealer Machine Stop #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 _ _ ___ User Password Note ! Single Ack. #2_3_13_002_B0:1, Unload Grab Sensor Break Dec. 23 14:23:46 #4_3_04_003_B4:1, Fill Hopper Low Hold Dec. 22 09:59:01 #1_3_Adm_001_F06:1, Adm Guard1 Crash Dec. 22 08:25:17 #2_3_10_001_X0:1, Seal Press Network Break !! Dec. 20 17:16:34 #3_3_10_001_P0:1, Seal Press Consecutive Fail ! Dec. 20 11:22:33 #6_3_02_010_C2:1, Load Feed Level Warn Dec. 19 07:23:07 #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #n_Identifier_Ʌn:X Message Date Time Past Pending #n_Identifier_Ʌn:X Message Date Time #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 !! Double Ack. _ _ ___ User Password Note #4_3_00_002_B1:1, Frame Lubrification Hold Dec. 17 15:11:44 Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_Sealer Configurations Configurations _3_Sealer Machine Run Open Pull Push Enable Process Stations • Offline Recipe • Online Recipe Set Tickets Enable SQR_3_01_ • • 01 SQR_3_02_Load • Load_Chasseral • Load_Chateleu 02 SQR_3_03_ • • 03 SQR_3_04_Fill • Fill_Chasseral • Fill_Chateleu 04 SQR_3_05_ • • 05 SQR_3_06_ • • 06 SQR_3_07_ • • 07 SQR_3_08_ • • 08 SQR_3_09_ • • 09 SQR_3_10_Seal • Seal_Chasseral • Seal_Chateleu 10 SQR_3_11_ • • 11 SQR_3_12_Trace • Trace_Chasseral • Trace_Chateleu 12 SQR_3_13_Unload • Unload_Chasseral • Unload_Chateleu 13 SQR_3_14_ • • 14 Save 07 Set / Rst All All Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_02_Load Configurations #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 _3_Sealer Machine Stop _02_Load Station Alm _001_Robot NoAlm 100% _002_Grab Alm 0 99% _003_Check NoAlm 100% _010_Feed Alm I 100% _004_ICC NoAlm 0.1% Use.Par_Tmr [ms] 980 Use.Par_Ctl [ ] -1 Use.Cfg_Act [ ] Use.Cfg_Safe [ ] Use.Cfg_Unsafe [ ] Use.Cfg_Failsafe [ ] Use.Cfg_Jog [ ] Use.Ctl_Jog [ ] Use.Ctl_Seq [ ] +0 Use.Ctl_State [ ] +0 Up.Typ_Recipes [ ] Global Uu.Typ_Params [ ] Local Up.Cfg_Clear [ ] Up.Cfg_RecipeID [ ] Chateleu Up.Cfg_UpID [ ] 302 Up.Cfg_NxtID [ ] 304 Tk.Cfg_Clear [ ] Tk.Cfg_LastUp [ ] Configurations Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_02_Load Parameters #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 _3_Sealer Machine Stop _02_Load Station Alm _001_Robot NoAlm 100% _002_Grab Alm 0 99% _003_Check NoAlm 100% _010_Feed Alm I 100% _004_ICC NoAlm 0.1% Parameters Min Value Max _Unload Time Out [ms] 940 940 940 _000_Path Time Out [ms] 100 210 360 _001_Robot Time Out [ms] 100 300 1000 _001_RobotZ High Setpoint [μm] -1000 0 100000 _001_RobotZ Pick Setpoint [μm] -1000 25000 100000 _001_RobotZ Place Setpoint [μm] -1000 50000 100000 _001_RobotX Pick Setpoint [μm] -50000 10000 500000 _001_RobotX Place Setpoint [μm] -50000 100000 500000 _001_RobotX Reject Setpoint[μm] -50000 200000 500000 _001_RobotX IPCs Setpoint [μm] -50000 300000 500000 _002_Grab Time Out [ms] 10 130 500 _003_Reject Time Out [ms] 10 120 500 _004_ICCs Time Out [ms] 10 2000 99999 _004_Sample Interval [part] 10 200 99999 _004_Shot Size [shot] 1 2 10 Parameters Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_02_Load Status #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 _3_Sealer Machine Stop _02_Load Station Alm _001_Robot NoAlm 100% _002_Grab Alm 0 99% _003_Check NoAlm 100% _010_Feed Alm I 100% _004_ICC NoAlm 0.1% Use.Sts_State [ ] 4 Use.Sts_FailID [ ] 002'2 Use.Sts_Seqp [ ] 102 Use.Sts_Seq [ ] 0 Use.Sts_Lag [ ] 101 Use.Sts_Failsafe [ ] Use.Sts_NoAlm [ ] Use.Sts_Estop [ ] Use.Sts_Done [ ] Use.Sts_Safe [ ] Use.Sts_End [ ] Use.Sts_Jog [ ] Up.Sts_FailID [ ] 002'02 Up.Sts_State [ ] 4 Up.Sts_NoAlm [ ] Up.Sts_Enable [ ] Up.Sts_Lagg [ ] Up.Sts_Prod [ ] Up.Sts_Fail [ ] Up.Sts_End [ ] Up.Sts_ICC [ ] Tk.Sts_RecipeID [ ] Chateleu Tk.Sts_PartID [ ] 3'009'985 Tk.Sts_NxtID [ ] 04 Tk.Sts_FailID [ ] 002'02 Tk.Sts_TkID [ ] 05 Tk.Sts_Time [ms] 980 Tk.Sts_InProd [ ] Tk.Sts_Enable [ ] Tk.Sts_Used [ ] Tk.Sts_Prod [ ] Tk.Sts_Fail [ ] Tk.Sts_End [ ] Tk.Sts_ICC [ ] Tk.Sts_OK [ ] Status Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_02_Load Reports #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 _3_Sealer Machine Stop _02_Load Station Alm _001_Robot NoAlm 100% _002_Grab Alm 0 99% _003_Check NoAlm 100% _010_Feed Alm I 100% _004_ICC NoAlm 0.1% Use.Rep_Tmr [ms] 1000 Up.Rep_TmrProd [ms] 3529870 Up.Rep_TmrFail [ms] 40203 Up.Rep_CtrProd [part] 3600 Up.Rep_CtrFail [part] 41 Up.Rep_MTTF [ms] 86094 Up.Rep_MTtR [ms] 980 Up.Rep_OEE [%] 98 Up.Rep_Tmr [ms] 980 Tk.Rep_TmrProd [ms] 724703 Tk.Rep_TmrFail [ms] 11581 Tk.Rep_CtrProd [part] 254 Tk.Rep_CtrFail [part] 12 Tk.Rep_MTTF [ms] 60391 Tk.Rep_MTtR [ms] 965 Tk.Rep_OEE [%] 94 Tk.Rep_Tmr [ms] 980 Part.BatchID 123456789 Part.RecipeID Chateleu Part.ProdGTIN 3092718605339 Part.Expiration 2020-Dec-24 Part.ProdTime 2019-Dec-24 Part.ProdSSCC SQR191224.- Part.PartID 3'009'979 Part.TkID 05 Part.Slot PP-SS-TT-05 Part.Tray PP-SS-TT Part.Stack PP-SS Part.Pallet PP Reports Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_02_002_Grab Reports _010_Feed Alm I 100% _001_Robot NoAlm 100% _002_Grab Alm 0 99% _003_Check NoAlm 100% _002_Grab Actuator Alm 0 _3_Sealer Machine Stop _02_Load Station Alm #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 _004_ICC NoAlm 0.1% Reports Rep_TmrProd [ms] 3528870 Rep_TmrFail [ms] 980 Rep_CtrProd [act] 3599 Rep_CtrFail [act] 1 Rep_MTTF [ms] 3528870 Rep_MTtR [ms] 1 Rep_OEE [%] 99 Rep_Tmr [ms] 100 Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_02_Load States #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 _3_Sealer Machine Stop _02_Load Station Alm States _001_Robot NoAlm 100% _002_Grab Alm 0 99% _003_Check NoAlm 100% _010_Feed Alm I 100% Run Estop StartUp Jog… FailSafe § I // _004_ICC NoAlm 0.1% Expert #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 States Reports Status Parameters Configurations SQR Line Run _ Machine _ Station _ Actuator Stoppages Alarms Shares Chateleu 123456789 Batch Recipe Line Machine 01:11 English Dec. 24 07:49:11 ID's Production Production Modes SQR_3_02_002_Grab States _010_Feed Alm I 100% _001_Robot NoAlm 100% _002_Grab Alm 0 99% _003_Check NoAlm 100% _002_Grab Actuator Alm 0 _3_Sealer Machine Stop _02_Load Station Alm States #6_3_02_010_C2:1, Load Feed Level Warn Dec. 24 07:49:11 #3_3_02_002_B0:0, Load Grab SensOn Fail ! Dec. 24 08:11:47 Alarm 0 Alarm I ON I FailSafe OFF 0 § I // _004_ICC NoAlm 0.1%
- 18. √𝑺𝑸𝑹 © MES NETWORK Control Systems Guidelines 17 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 6 MES NETWORK It networks the machines to the Manufacturing Execution Systems (MES) to manage batch, handle recipes, catch alarms, trace parts and record reports. Such Condition-Based Monitoring's (CBM) collect and contextualize edge reports for production improvement as for Maintenance, Repair & Overhaul (MRO); such data may establish trends, predict failures and prescribe corrective actions. those tasks may run in a line PLC or in a Data Server that shall redundantly collect machines data via OPC-UA Client services, while machines host OPC-UA Servers. Line Modes It means operational periods of the line and affects the reports calculations. Line Modes Periods … define the Stoppages types and under which Batch Production Batch To produce parts based on ordered batch’s. Maintenance MRO To execute Maintenance-Repair-Overhaul. X Manual Free When a line is vacant or released. Line States In Production, a line PLC or MES Server controls the line state to synchronize all line systems to Batch, Raw-Lot and Recipe in compliance with IEC-61512-1:1997. Line States Line behavior Systems behavior Run Starting Running batch. Running under MES control. Pause Pausing Pausing batch. Temporary pause the batch. Idle Waiting Line is ready to bath. Systems are ready to produce. ClearUp Reset Clear for new batch. Setup batch, recipe and raw-lot data. Complete Ending Batch is successful. Empty line and release batch. Abort Aborting Batch has failed. Empty line and scrap batch. MES Types They network data to build E2E chain through all the line from each machine. Typ_MESCtl-Sts To Network mirrored control/status by system. Batch Typ_Batch[n] Network Batch data (Manufacturing Order). BatchCtl-Ack DINT/BOOL Network Batch Control and Status Recipe Typ_Recipe[n] Network Recipe Parameters. RecipeCtl-Ack DINT/BOOL Network Recipe Control and Status. RawLot Typ_RawLot[n] Network material Raw-Lots linked to batch. RawLotCtl-Ack DINT/BOOL Network material Raw-Lots Control and Status. Trace Typ_Trace[n] Network Part's Traceability. TraceCtl-Ack DINT/BOOL Network Part's Control and Status. ModeSystem DINT Network System Modes. StateSystem DINT Network System States. SpeedSystem DINT [Cyc/Min] Network System Current Speed. RateSystem DINT [Part/Min] Network System Average Rate. Typ_KPIs For key performance indicators by system events. IPC Typ_IPC[n] Network Inline Process Control by system. IPS Typ_IPS[n] Network Inline Process Sampling by system. NRG Typ_NRG[n] Network Energies Consumption by system. Rep Typ_Rep[n] Network Reports based on systems States. STP Typ_STP Network Stoppages vs Alarms (i.e. RCA) SystemID STRING Network System Identifier. UserID STRING Network User Identifier. 6.3.1 Batch It networks data usedto synchronize systems to batch(manufacturingorder) with twoMESinstances(oneforcontrol"MESCtl.Batch"andoneforstatus"MESSts.Batch"). [#].Attribute Type Description (may expose multiple instances) _.ID DINT/STRING Batch Identifier (Manufacturing Order). _.RecipeID DINT/STRING Product Recipe Identifier (number / name). _.ProdGTIN DINT/STRING Product Global Trade Item Number vs GS1 Authentication. _.Expiration DINT/STRING Product Parts Expiration linked to Batch Date & Time. _.RawLotsID DINT/STRING Raw-Lots List Identifier for SSCC as S/N high digits. _.Quantity DINT Required Batch Quantity. _.ModeLine DINT Get Line Modes. _.StateLine DINT Get Line States. Abort Complete ClearUp Idle Run Pause
- 19. √𝑺𝑸𝑹 © MES NETWORK Control Systems Guidelines 18 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 6.3.2 Recipe It networks the recipes parameters to a Station Up‘s every time its Ticket‘s RecipeID changes, see §MES Network Types; the values tied to CPPs, CQAs or OPRPs that may alter the product require single [!] or double [!!] eSignature!. [#].Attribute Type Description (may expose multiple instances) _.ID DINT/STRING Product Recipe identifier (number / name). _.P&ID DINT/STRING Module P&IDn. _.Role STRING Role Description. _.Unit STRING Engineering Unit. _.Min TBD Range minimum. _.Max TBD Range maximum. _.Value TBD Value as setpoint. 6.3.3 Raw-Lot It networks data type for material Raw-Lots consumed or produced by the systems in relation to the running batch, see §MES Network Types. [#].Attribute Type Description (may expose multiple instances) _.ID DINT/STRING Material Raw-Lot identifier (number / name). _.Role STRING Material Raw-Lot role description. _.Category STRING Material Raw-Lot category. _.Quantity DINT Material Raw-Lot quantity. _.Ratio TBD Material Raw-Lot ratio. 6.3.4 Trace It networks the Traceability to serialize Part's, see §MES Network Types. [#].Attribute Type Description (may expose multiple instances) _.Typ_PRN Typ_Part[n] Refer with data to write to the print device. _.Typ_CHK Typ_Part[n] Refer with data to read from the check device. _.Control DINT Set the case/state. _.ModeLine DINT Get Line Modes. _.StateLine DINT Get Line States. _.Sts_Batch BOOL Rises when Ctl_Batch matches Sts_Batch. _.Sts_SSCC BOOL Rises when Ctl_Part matches Sts_Part. 6.3.5 Part It networks contextualizable Traceable part's Reportsprimary/secondary/tertiary/shipment with Ticketing transactions to Ticket that moves it up to be a𝑃𝑟𝑜𝑑𝑢𝑐𝑡 = 𝑃𝑎𝑟𝑡 𝐶𝑜𝑚𝑝𝑙𝑒𝑡𝑒. [#].Attribute Type Description (may expose multiple instances) _.BatchID DINT/STRING Batch Identifier (Manufacturing Order). _.RecipeID DINT/STRING Product Recipe Identifier (number / name). _.ProdGTIN DINT/STRING Product Global Trade Item Number vs GS1 Authentication. _.Expiration DINT/STRING Identify the Product Expiration as Date & Time. _.ProdTime DINT/STRING Identify the Product Current Time as Date & Time. _.ProdSSCC DINT/STRING Identify the Product SSCC as S/N high digits. _.PartID DINT Identify the Part Identifier as S/N low digits. _.UpID DINT Identify the last station Up with _.Sts_Prod OK. _.NxtID DINT Identify the next station Up for the current part. _.UseID DINT Identify the next Use CaSe (also for Inline-Checks). _.FailID DINT Identify the Failure versus Alarm (if _.Sts_Prod KO). _.TkID DINT Identify the part Ticket in the Circular buffer. _.Slot DINT/STRING Identify the slot/pouch in the tray (i.e. Primary). _.Tray DINT/STRING Identify the tray/rack in the stack (I.e. Secondary). _.Stack DINT/STRING Identify the stack/carton in the pallet (i.e. Tertiary). _.Pallet DINT/STRING Identify the pallet/container of batch (i.e. Shipment). _.Report... TBD[n] See Process Values (Weight, T°, Level, Delay, …). See §Reminder Parts Trace and Pallet Twin for an implementation synoptic. 6.3.6 Ticketing It networks Ticket’s transactions to MES for Parts Traceability (see 21 CFR Part 11). [#].Attribute Type Description (may expose multiple instances) _.Typ_Tks Typ_Tk[n] Refer Ticket’s array tracing Parts on the Process Path. _.Typ_TkIDs DINT[n] Refer with the Circular Buffer tied to part Ticket’s IDs. _.Typ_MES Typ_MES Refer MES data shared by Parts moving on a machine. _.Typ_Parts Typ_Part[n] Refer Part‘s data sent to MES while leaving a machine. _.Par_Tmr DINT Tune Transaction response time. _.Cfg_Push DINT Fix Ticket’s identifier for a PUSH transaction. _.Cfg_Pull DINT Fix Ticket’s identifier for a PULL transaction. _.Ctl_Push BOOL Set Ticket’s transaction to PUSH data to the Part’s array. _.Ctl_Pull BOOL Set Ticket’s transaction to PULL data from the MES. _.Ctl_Rst BOOL Set Reset, FROM global logic TO alarm logic. _.Sts_NoAlm BOOL Get if transaction complete before timeout. _.Sts_Push BOOL Get Ticket’s PUSH transaction done. _.Sts_Pull BOOL Get Ticket’s PULL transaction done. _.Rep_Push DINT See Ticket’s reports for Push transactions. _.Rep_Pull DINT See Ticket’s reports for Pull transactions.
- 20. √𝑺𝑸𝑹 © MES NETWORK Control Systems Guidelines 19 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx KPIs Types TheKeyPerformanceIndicatorssharerelevantEdgeReportstorankthesystems. 6.4.1 I P C It networks data for Inline Process Control by system (for critical Instruments). [#].Attribute Type Unit Description (may expose multiple instances) _.Typ_Meas Typ_MeasCtl-Sts Refer with the Inline Measure module. _.Typ_MES Typ_MESSts Refer with the MES status network. _.Par_Offset TBD [tbd] Tune the offset for calibration. _.Par_Reject TBD [tbd] Tune the reject limit. _.Par_Limit1 TBD [tbd] Tune the 1st limit. _.Par_Limit2 TBD [tbd] Tune the 2nd limit. _.Control DINT Set the case/state. _.TimeStamp LINT/STRING See time as Date & Time versus Batch time. _.Sample LINT [part] See quantity of done probe value. _.Reject LINT [part] See quantity of bad probe value. _.Count1 LINT [part] See quantity of probe values below 1st limit. _.Count2 LINT [part] See quantity of probe values below 2nd limit. _.Probe TBD [tbd] See last probe value. _.Sigma TBD [tbd] See standard probe values deviation in sample. _.Average TBD [tbd] See probe values average in sample. _.Sts_ICC BOOL Get if probe device is under Calibration as Inline-Checks. _.Sts_OK BOOL Get if probe is ready to be measure. 6.4.2 I P S It networks data for Inline Process Sampling by system (Inline-Checks as KQI). [#].Attribute Type Unit Description (may expose multiple instances) _.Typ_Spg Typ_Spg Refer with the Inline Sampling module. _.Typ_Parts Typ_Part[n] Refer with the Part’s First-In-First-Out buffer. _.Typ_Tks Typ_Tk[n] Refer with the Circular Buffer tied to part Ticket IDs. _.Cfg_TkID DINT Fix the part Ticket identifier in the Circular buffer. _.ShotSize LINT [part] Tune the shot size. _.SampleSec LINT [sec] Tune the period between shot in time. _.SampleSize LINT [part] Tune the number between shot in part. _.Control DINT Set the case/state. _.Order BOOL Set a manual shot. _.Stamp BOOL Set a checkout shot. _.PartID STRING See the current part identifier (i.e. S/N). _.ShotID STRING See the last shot part identifier (i.e. S/N). _.Rep_Sampling LINT [part] See the total Sampling parts. _.Rep_Sampled LINT [part] See the last Sampled part. _.Rep_Shotted LINT [part] See the Shotted quantity. _.Sts_Hold BOOL Get when shot is waiting for user. _.Sts_Pause BOOL Get when shot is waiting for MES. _.Sts_Shoot BOOL Get while the system is shooting. _.Sts_Over BOOL Get when last shot reached over time. _.Sts_OK BOOL Get when a shot is ready for approval. 6.4.3 NRG It networks data for Energies Consumption by system (machine power uses). [#].Attribute Type Unit Description (may expose multiple instances) _.Typ_Nrgs Typ_NrgCtl-Sts Refer with the Energies Monitoring module. _.Control DINT Set the case/state. _.ModeSystem DINT Get System Modes. _.StateSystem DINT Get System States. _.RateSystem DINT [Cyc/Min] See System Current Rate. _.Electricity TBD [kWh] See Electrical Consumption. _.AirPress TBD [m3 ] See Air Pressure Consumption. _.N2Gas TBD [m3 ] See N2 Gas Consumption (Optional). _.Water TBD [m3 ] See Water Consumption (Optional). _.WaterWaste TBD [m3 ] See Waste-Water Consumption (Optional). _.WaterCold TBD [kWh] See Cold-Water Consumption (Optional). _.WaterHot TBD [kWh] See Hot-Water Consumption (Optional). _.Steam TBD [Ton] See Steam Consumption (Optional). _.Fuel TBD [Ton] See Fuel Consumption (Optional). _.Oil TBD [Ton] See Oil Consumption (Optional).
- 21. √𝑺𝑸𝑹 © MES NETWORK Control Systems Guidelines 20 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 6.4.4 Stoppages A stoppage is a period without production ! Its root cause may be identified from the Initial Alarm ID or from HMI’s stoppages selection versus Line Modes; the stoppage ID shall merge Alarm Priority#, P&IDn and device IEC Code; it is one of thekeysto improve productivityeffectivenesswithanefficientRootCauseAnalysis. IEC-81346 Device Code B-B ool Sensor C-Level E-Energy F-Safety P-Probe S-Signal X-Network O.E.E. Batch Alarms # versus IEC-62682 Location versus DeviceID Effectiveness versusPeriods (i.e. Line Modes) System Crash "1" P&IDn Hazard Stop Batch Period Process Break "2" Major Process Fail "3" Minor Product. Hold "4" Performance Prod. Loss Product. Pause "5" Predict Warn "6" Quality Prescrib Alert "7" Set from HMI screen Empty - Clean - Setup Change Over "8" Maintenance - Repair - Overhaul Check-Up - Warm-Up - Labor Stoppage MRO Period x "9" Demand Lack - Materials Lack Labor Lack Free Period [#].Attribute Type Description (may expose multiple instances) _.RootCause REAL See "Alarm# . P&IDn . Code" (ex: 1.3'02'001.24). _.TotalCause LINT See Change-of-Stoppage incrementation value. 6.4.5 Reports For Machines , Stations and Actuators , they collect and frame in Real Time contextualized edge values such as Overall Equipment Effectiveness to reveal potential Productivity Gains and improve Sustainability based on Prediction and Prescription; they prefigure edge computing for the digital twin features. [#].Attribute Type Unit Description (may expose Batch, Shift or Uses reports) _.ModeSystem DINT Get System Modes. _.StateSystem DINT Get System States. _.Configurations DINT Fix Up(s) Nbr, Clear Rqst, … _.UsedTime LINT [sec] See Used time. _.ProdTime LINT [sec] See Producing time. _.UsedParts LINT [part] See Used parts count. _.ProdParts LINT [part] See Produced parts count. _.FailParts LINT [part] See Failedscrap parts count. _.MTTF LINT [sec] See Mean-Time-To-Fail. _.MTtR LINT [sec] See Mean-Time-To-Repair. _.Availability DINT [%] See Ratio of ProdTime to UsedTime (i.e. Operability). _.Performance DINT [%] See Ratio of UsedParts to ProdTime x Rate. _.Quality DINT [%] See Ratio of ProdParts to UsedParts. _.OEE DINT [%] See Ratio of ProdParts to UsedTime x Rate. _.Tmr DINT [ms] See Last Cycle Time (relative to System Speed). Efficiency = 𝑜 𝑡 𝑠 𝑟 𝑡 Effectiveness = 𝑜 𝑡 𝑒 𝑟 𝑡 𝑡 𝑠 Production Good Product atNominal Rate 𝑃𝑟𝑜𝑑𝑃𝑎𝑟𝑡𝑠 𝑅𝑎𝑡𝑒 𝑸 = 𝑃𝑟𝑜𝑑𝑃𝑎𝑟𝑡𝑠 𝑠𝑒𝑃𝑎𝑟𝑡𝑠 𝑃𝑟𝑜𝑑 𝑚𝑒 = 𝑃𝑟𝑜𝑑 𝑚𝑒 𝑠𝑒 𝑚𝑒 AvailabilityLoss E-Stop + Startup + Stop Performance Loss TransientStates + Hold Quality Loss Product Failed 𝑠𝑒𝑃𝑎𝑟𝑡𝑠 𝑅𝑎𝑡𝑒 = 𝑠𝑒𝑃𝑎𝑟𝑡𝑠 𝑃𝑟𝑜𝑑 𝑚𝑒 𝑅𝑎𝑡𝑒 𝑠𝑒 𝑚𝑒 DIN-8743, DIN-8782 Real Time OEE Calculation End End // I I E-Stop Reset StartUp Stop Hold-to-Run Start… R u n IEC-60204-1:2016 = 𝑃𝑟𝑜𝑑 𝑚𝑒 𝑎 𝑙𝑃𝑎𝑟𝑡𝑠 𝑡𝑅 = 𝑎 𝑙 𝑚𝑒 𝑎 𝑙𝑃𝑎𝑟𝑡𝑠 = 𝑃𝑟𝑜𝑑𝑃𝑎𝑟𝑡𝑠 𝑠𝑒 𝑚𝑒 𝑅𝑎𝑡𝑒 Hazard Stop MajorStop MinorStop Production Loss IEC-62682-1:2014 𝑃𝑟𝑜𝑑𝑢𝑐𝑡 𝑡𝑦 = 𝑠𝑒𝑃𝑎𝑟𝑡𝑠 𝑠𝑒 𝑚𝑒 𝑅𝑎𝑡𝑒
- 22. √𝑺𝑸𝑹 © REMINDER Control Systems Guidelines 21 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 7 REMINDER 7.1.1 Main Energies All Energies that could cause injuries shall be involved in the SRP/CS, safety related parts of Control System; they shall keep the system safe if guards are disable, see Safety. The design of all energies distribution shall be able to manage JogSafe Mode with device(s) such as Deadman Switch. The values of Earth Fault Currents shall be limited to reduce their effects. The AC power supply neutral can be earthed by different methods; the Zn impedance between neutral and earth may be resistive or inductive from zero to infinite values. 7.1.2 Neutral Earthing Zn = ∞ Resistance Reactance Capacitance Zn = 0 Potential Damages Very Low Low Low Very Low Very High Touch & step voltages Very Low Low Low Low High Transient over voltages High Low High High Low Temporary over voltages High Medium Medium Medium Low 7.1.3 Safe Stop Categories See §Control Model Alarms and IEC-60204-1:2016. SS0 Immediate stop by REMOVING the energies on all actuators to initiate an uncontrolled stop. SS1 Controlled stop with the energies and then REMOVE the energies on UNSAFE actuators. SS2 Controlled stop with the energies and then MAINTAIN the energies on all actuators. 7.1.4 Safety Functions See §Reminder PLr Calculation and IEC-61508:2010. SBC Safety Brake Control check with STO. SLT-STR Safety Limited Torque check & stop over torque. SDI Safety Direction move check & SS1 on failure. SOS Safety Operating Stop & zero-speed, No shutoff. SFX Safety Feedback on position & speed check. SS1 Safety Stop 1 compliant with stop category #1. SLP Safety Limited Position check. SS2 Safety Stop 2 compliant with stop category #2. SLS Safety Limited Speed check. ST0 Safety Torque 0ff by shutoff without check. • Yellow-Green : Equipotential bonding • Black / Grey / Brown : AC / DC power • Orange : light / socket / ... • Dark Blue : DC Control • Light Blue : AC neutral • Red : AC Control ProgressivePressure Cut Air Supply Unsafe Cylinders Safe Devices SRP's LOGIC Safe Cylinders PLC's LOGIC Air Supply Emergency-Stop Guard Interlock Presence Sensor Main Switch Clean Air • L1 • L2 • L3 • N • PE TN-S Network Zn Main Valve Redundant Main Valve RedundantBreakers EMI-EMC Filters & Overload Protection Cut Electrical Supply Unsafe Devices Uncut Electrical Supply ST0-SS1 SS0 Uncut Air Supply SS2-SLS Dead-Man Switch Sleep Energies & Safety See References for the machinery directives.
- 23. √𝑺𝑸𝑹 © REMINDER Control Systems Guidelines 22 / 31 √𝑆𝑄𝑅 © - All rights reserved, do not share without written approval. “fix mindset, do not mine fixes.” 2022-04-19 SQR_CSG_VI4x.docx 7.1.5 Safety Symbols Color's code assigns particular meanings to visual and tactile signals from simple cases such as buttons or LEDs to extensive controls such as screens. It improves visual-tactile hazards awareness due to : • An intuitive recognition of control conditions and devices positions to avoid unintended misuse. • A proper monitoring, control and maintenance of the modules or devices with less confusion. 7.1.7 Safety Tasks Both Process and Safety tasks are synchronized in the most robust way; as shown in this diagram, it means a clear mapping between the machine States and the Safety Functions. • IEC-60204:2016 §9.2.3.4.2 Emergency-Stop The emergency stop shall function either as a safe stop category #0 or as a stop category #1. The choice of the safe stop category from the emergency stop depends on the results of a risk assessment of the machine. NOTE: In some cases, to avoid creating additional risks, it can be necessary to perform a controlled stop and maintain the power to actuators even if stopping is achieved. The stopped condition shall be monitored and upon failure detection of the stopped condition, power shall be removed without creating hazardous situations. • ISO-13849-1:2015 §5.2.2Manual Reset Function After a stop command has been initiated by a safeguard, the stop condition shall be maintained until safe conditions for restarting exist. The re-establishment of the safety function by resetting of the safeguard cancels the stop command. If indicated by the risk assessment, this cancellation of the stop command shall be confirmed by a manual, separate and deliberate action (manual reset). The manual reset function shall ⎯ be provided through a separate and manually operated device within the SRP/CS, ⎯ only be achieved if all safety functions and safeguards are operative, ⎯ not initiate motion or a hazardous situation by itself, ⎯ be by deliberate action, ⎯ enable the control system for accepting a separate start command, (the manual reset ENABLE the separate start). ⎯ only be accepted by disengaging the actuator from its energized (on) position (ENABLE on the negative threshold). The reset actuators shall be situated outside the danger zone and in safe positions where there is good visibility for checking that no person is within the danger zone. Where the visibility of the danger zone is not complete, a special reset procedure is required. • IEC-62046:2018 §5.6 Restart Interlock A Resetting a restart interlock is always a safety-related function. Measures shall be provided to reduce the probability of the restart interlock being reset by a transient or steady-state fault condition. Such measures can include, for example, requiring both a rising and falling edge signalwithin a defined time (e.g. between 150 ms and 4 s) froma manually actuated resetdevice. NOTE: A pulse or falling edge on "reset" shall be done to enable a separate "start", this to prevent a potential damaged push button. 0n Marche 0ff Arrêt 0n/0ff (push on - push off) Reset Acquit Start Marche Hold-to-Run Action Maintenue Stop Arrêt Emergency-Stop Arrêtd'urgence IEC 60417-5007 IEC 60417-5008 IEC 60417-5010 IEC 60417-1027 IEC 60417-5104 IEC 60417-5011 IEC 60417-5110A IEC 60417-5638 ! Colors Symbols Meanings Explanations Actions by Operator Flashing Alerts Machine States Buttons Red Emergency Urgent Hazard condition Immediate action to care system hazard to indicate discrepancy E-Stop E-Stop Yellow Abnormal Anormale Major or minor condition Cautiousaction to care process hazard To indicate transition Startup Stop 0ff Blue Mandatory Obligatoire Careful condition Mandatoryaction to resume production To request action Hold Reset Green Normal Normale Normal condition Optionalaction to predict or prescribe To attract attention Run 0n Black White Neutral Neutre Other conditionsif any warn on other colors Monitoring Other(s) 0n/0ff // I 7.1.6 Safety Colors See §User Interface HMIs Duties and IEC-60204-1:2016. Colors Symbols Meaning Explanation Action by Operator Flashing States Buttons // I I EmergencyStop In terlo ckin g Sa feg u a rd s Startup Safe Controlled Stop Run Manual Reset Hold to Run SAFE PWUP MUTE SJOG SS2 ST0 SS1 SS0 SLS ST0 SS1 SLS SS1 SLS SS2 SS2