Recommended

Recommended
More Related Content
Similar to Wing Configuration Efficiency of a Miniature Four-Winged Ornithopter
Similar to Wing Configuration Efficiency of a Miniature Four-Winged Ornithopter (20)
Wing Configuration Efficiency of a Miniature Four-Winged Ornithopter
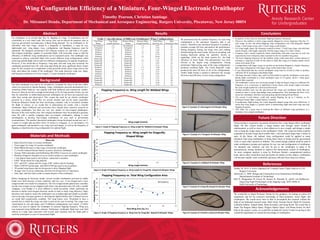
- 1. Materials and Methods Materials • Balsa Wood for body of wooden ornithopter • Tissue paper for wings of wooden ornithopter • Didel MK04-40 motor to flap wings of electronic ornithopter • 3 x 8 mAh Lithium Polymer battery to power electronic ornithopter • Turnigy 9XR transmitter and HobbyKing HK103RX-S receiver to control ornithopter • Plantraco HingeAct Actuators to act as control surfaces to steer ornithopter • 1 mm depron foam used as tail surfaces, connected to actuators • 0.002” Mylar sheets for wing material • 0.01” and 0.02” carbon rods for wings, 0.08” carbon rods for fuselage • Didel G309-072 pinion gear and Didel G360 spur gear to act as gearbox • 3D printed wing braces and revolving arms to drive flapping flight • 30 gage wires to act as connecting rods from revolving arms to wing braces • Glue, tape, and Fun-Tak in order to attach all parts of the ornithopter. Before designing an electronic model, several wooden ornithopters powered by rubber bands were built because of their simplicity and low cost. A two-winged and a four- winged model were made for comparison. The two-winged model glided more smoothly, but the four-winged version flapped much faster and generated more lift with a smaller wingspan, even though it is more difficult to build accurately, which confirmed our decision to build a four-winged electronic model in order to study wing efficiency. Many decisions were made to ensure the ornithopter was as lightweight and simple as possible, such as having a two-gear gearbox or choosing the lightest battery and 3-channel receiver we could find commercially available. The wing braces were 3D-printed to have a smooth slot in which the wings can slide in and out for ease of testing. The wings were varied based on size and shape, and 19 different configurations were tested.. A GoPro camera was used to capture the ornithopter to measure flapping frequency. Wing area was measured using Solidworks software. Preliminary ornithopter flight tests were held indoors in a large open classroom with several team members near the flight path to catch the ornithopter in cases of unsustained flight. Timothy Pearson, Christian Santiago Dr. Mitsunori Denda, Department of Mechanical and Aerospace Engineering, Rutgers University, Piscataway, New Jersey 08854 Abstract An ornithopter is an aircraft that flies by flapping its wings. If ornithopters can fly controllably at a very small scale, like insects, they can be utilized for purposes such as close-up government reconnaissance without being detected. For an ornithopter to fly efficiently with four wings, similar to a dragonfly or bumblebee, it must be very lightweight, and wing shapes, sizes, configuration, and flapping frequency must be optimized. We designed, performed CAD software analysis on, and built a 4.8 gram, four-winged ornithopter capable of controlled flight, with removable wings so that the efficiency of different wing combinations can be measured easily. The ornithopter was expected to achieve controlled flight with several different wing configurations, while achieving optimal flight with at least two different configurations at separate frequencies. However, it was found that as frequency, wing span, and total wing area increased, the ornithopter generated more lift, with wing span being the most significant factor. Future steps for this research are to implement a more powerful motor, place wings close to the body, and reduce the weight of the ornithopter. This study discovers wing size, shape, and frequency tendencies of a four-winged, 3-5 gram miniature ornithopter. Background The first ornithopter was said to be invented by Leonardo Da Vinci in the late 1400s, which was powered by human flapping. Today, ornithopters powered mechanically by a wound-up rubber band are very popular with both hobbyists and commercial vendors. However, these do not have enough stored energy to fly for long periods of time, nor can they be controlled, so rubber-band powered ornithopters do not have any practical uses other than testing and observation. This creates the need for an electric ornithopter powered by a motor, which flies for several minutes and can be easily controlled. Professor Mitsunori Denda has been developing computer code to accurately simulate the flight of insects, so we would like to demonstrate his results with a real-life ornithopter. Many hobbyists and universities have already done extensive research on two-wing ornithopters, but there are very few studies on four-winged ornithopters. Because of the extra surface area, four-winged ornithopters have the potential to generate more lift with a smaller wingspan than two-winged ornithopters, making it more advantageous to develop four-winged ornithopters for uses such as government reconnaissance. The smallest functional ornithopters being developed around now are 3- 5 grams in weight and anywhere from 2-6 inches in wingspan, so we developed a 4.8 gram ornithopter, and decided to vary wing sizes and shapes, as well as the frequency of flapping, to determine the wing configuration for optimal flight. Future Direction Future testing is required to accurately determine how wing shapes affect ornithopter flight. On this current model, a larger battery and stronger motor should be implemented, as well as ways to limit adhesives to save weight, and design a simple way to bring the wings closer to the ornithopter’s body. The wing size limits could be expanded to include wings much smaller than 1 inch and much larger than 3 inches in span. In the future, the optimal wing configuration could be applied to many miniature four-wing ornithopters to bring them closer to being used for government work or some other function in industry. The current design method could be used to make ornithopters pronate and supinate for any size and configuration of ornithopter. An autopilot and Arduinos can also be put in the ornithopter to make it fly autonomously, testing methods to improve the autonomous control of ornithopters. As more computer analysis is done by Professor Denda’s computational analysis team, and as other researchers and universities do studies on this subject, ornithopters will become smaller, more controlled, and more efficient flyers than ever before. Acknowledgements We would like to thank Professor Denda for his guidance, for letting us utilize his equipment, and for his extensive knowledge of fluid dynamics, insect flight, and ornithopters. We would never have to able to accomplish this research without the help of our dedicated research team: Shail Amin, Gerome David, Mark De Guzman, Gabriella Dobkin, Aakash Hathi, Brian Kowalski, and Dong Kwak. We would like to thank The Rutgers Maker Space, Rutgers Hacker Space, and Shaun Kenny for their help in this project. Lastly, we would like to thank the Aresty Center for giving us this wonderful opportunity to extend the knowledge of ornithopters. References Denda, M. 2014. A Vortex Approach for Unsteady Insect Flight Analysis in 2-D. Rutgers University. Jackowski, Z. 2009. Design and Construction of an Autonomous Ornithopter. Massachusetts Institute of Technology. Bijl, H., Bruggeman, B., Groen, M., Remes, B., Ruijsink, R., and B. van Oudhuesen. Improving Flight Performance of the flapping wing MAV Delfly II. Delft University of Technology. Results Conclusions • In general, as the wing size increased, flapping frequency decreased. • However, the smallest (1-inch) wings actually flapped at a lower frequency than the 1.5- inch wings. In fact, the fastest-flapping wing configuration was with dragonfly shaped wings, 1-inch wings on top, and 1.5-inch wings on the bottom. • For wing length (span), the frequency peaked at about 1.5-inch long wings, then declined mostly linearly with length, especially with the larger wings of 2.5 and 3 inches. • Frequency had a mostly negatively linear relationship with total wing area as well, but experienced a lower frequency than expected for the two smallest wing areas. • The lower flapping frequency for the smallest wings could mean that a certain amount of resistance is required in order for the motor to flaps that wings at its highest speed, which seems to be about 30 hz. • Configurations with larger wings on top than on the bottom flapped at a higher frequency than wing configurations with larger wings on the bottom than on top. • It was determined that the current ornithopter setup must be revised in order to produce sufficient lift for prolonged controllable flight. • The large amounts of glue, tape, and Fun-Tak needed to keep the ornithopter in one piece during flight contributed to a final ornithopter mass of 4.8 grams, about 1 whole gram heavier than expected. • The ornithopter’s motor was not strong enough to flap the largest wings at a sufficient lift frequency, so it is necessary to implement a motor whose extra torque output overcomes the extra weight needed for a more powerful motor. • Another possible issue was the gap between the wings and ornithopter body that was needed in order to easily interchange wing configurations. This interrupts the flow of air across the ornithopter, therefore increasing drag and decreasing lift and thrust. • The current 8 mAh battery could only sustain flapping for up to 2 minutes, so for prolonged steady flight, a larger battery is needed. • In preliminary flight testing, the 3-inch dragonfly-shaped wings flew most effectively. It seems that wing length is a greater factor in determining flight than both wing area and flapping frequency. • This study was a great start in learning the effects of different wing parameters in a miniature, four-winged ornithopter. Wing Configuration Efficiency of a Miniature, Four-Winged Electronic Ornithopter We determined that the optimal frequency for each wing configuration is the maximum frequency that it can achieve. Therefore only maximum frequency is needed to calculate average lift force and analyze the performance. During frequency testing, the wings were seen rotating forward during the down-stroke, known as pronating, and rotating backward during the upstroke, known as supinating, which are the main reasons for the high efficiency of insect flight. This phenomenon was more obvious in the largest wing configurations. During preliminary flight testing, none of the wing configurations produced sustained flight. The 3-inch dragonfly wings produced the most lift force of all of the configurations. Further flight testing is needed to determine the average lift forces and efficiency of each wing configuration. 0 5 10 15 20 25 30 1 1.5 2 2.5 FlappingFrequency(hz) Wing Length (Inches) Flapping Frequency vs. Wing Length for Webbed Wings 0 5 10 15 20 25 30 1 1.5 2 2.5 3 FlappingFrequency(hz) Wing Length (Inches) Flapping Frequency vs. Wing Length for Dragonfly- Shaped Wings Figure 1: Graph of Flapping Frequency vs. Wing Length for Webbed Ornithopter Wings Figure 2: Graph of Flapping Frequency vs. Wing Length for Dragonfly- Shaped Ornithopter Wings Figure 4: Example of a Rectangular Ornithopter Wing Figure 5: Example of a Triangular Ornithopter Wing Figure 6: Example of a Webbed Ornithopter Wing Figure 7: Example of a Dragonfly-Shaped Ornithopter Wing Figure 8: Example of a Realistic-Looking Ornithopter WingFigure 3: Graph of Flapping Frequency vs. Wing Area for Dragonfly- Shaped Ornithopter Wings 0 5 10 15 20 25 30 0 2 4 6 8 10 12 FlappingFrequency(hz) Total Wing Area (sq. in.) Flapping Frequency vs. Total Wing Configuration Area Frequency