1. 4. Використання властивостей симетрії при виборі основної
статично визначуваної системи
Якщо маємо деяку симетричну в геометричному відношенні раму (рис.7а), то
її права частина може розглядатися як дзеркальне відображення лівої частини
відносно плоскості симетрії.
При розрахунку таких рам можливо спростити рішення задачі і знизити
число розшукуваних силових факторів nXXX ,...,, 21 .
Розглянемо випадки, коли на раму діють симетричне чи кососиметричне
навантаження. Під симетричним навантаженням будемо розуміти таку, при якій
всі зовнішні сили, прикладені до правої частини рами, є дзеркальним
відображенням сил, прикладених до лівої частини (рис.7б). Під кососиметричним,
або антисиметричним навантаженням будемо розуміти таку, при якій сили
прикладені до правої половини рами, також є дзеркальним відображенням сил,
прикладених до лівої половини, але протилежні їм за знаком (рис.7в).
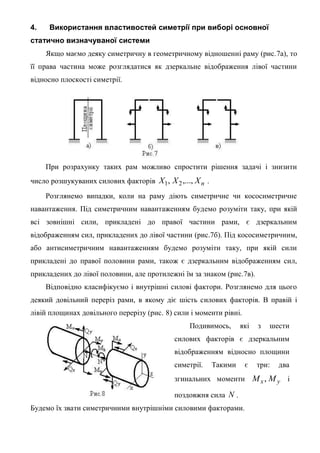
Відповідно класифікуємо і внутрішні силові фактори. Розглянемо для цього
деякий довільний переріз рами, в якому діє шість силових факторів. В правій і
лівій площинах довільного перерізу (рис. 8) сили і моменти рівні.
Подивимось, які з шести
силових факторів є дзеркальним
відображенням відносно площини
симетрії. Такими є три: два
згинальних моменти yx MM , і
поздовжня сила N .
Будемо їх звати симетричними внутрішніми силовими факторами.
2. Крутний момент кM і обидві поперечні сили yx, QQ повинні бути названі
кососиметричними силовими факторами. Кожний з них протилежний по знаку
дзеркальному відображенню взаємного фактора. Неважко тепер довести наступні
положення.
В симетричній рамі в площині симетрії при симетричному зовнішньому
навантаженні нульовими будуть кососиметричні силові фактори, а при
кососиметричному зовнішньому навантаженні – симетричні силові фактори.
Побічні питомі переміщення в системі (10) будуть рівними нулю при
перемноженні епюр від симетричних силових факторів на епюри від
кососиметричних силових факторів.
Це відбувається тому, що в симетричній рамі немає взаємних
кососиметричних переміщень під дією симетричних навантажень. Таким же
чином не буває симетричних переміщень від дії кососиметричних факторів. В
результаті система канонічних рівнянь методу сил розпадається на дві незалежні
системи.
Крім того, при симетричному зовнішньому навантаженні кососиметричні
силові фактори в площині симетрії будуть дорівнювати нулю. При
кососиметричному навантаженні нульовими будуть симетричні силові фактори в
площині симетрії.
Якщо навантаження, прикладене до симетричної рами, не є ні симетричним,
ні кососиметричним (рис. 9а), завжди мається можливість розкласти його на
симетричне (рис. 9б) і кососиметричне (рис. 9в). Задача при цьому розпадається
на дві. Розглядається окремо симетрична рама з кососиметричним навантаженням
і рама з симетричним навантаженням. Внутрішні силові фактори в рамі далі
визначаються накладенням знайдених рішень.
3. У випадку, коли рама має косу геометричну симетрію, можна шляхом
сопоставлення епюр для двох половин рами спростити систему канонічних
рівнянь.
Все наведене вище, зберігає силу не тільки для плоских, але і для
просторових рам з будь-яким ступенем статичної невизначуваності.