2011.11.22 第20回日本コンピュータ外科学会大会 統計アトラスに基づく単純X線画像からの人工股関節3次元カップ手術計画自動立案

An automated 3D cup planning method in total hip arthroplasty from a standard X-ray radiograph is described. To achieve this objective, we integrate a statistical reconstruction method of 2D-3D pelvis shape reconstruction method and a 3D automated cup planning method which have been previously proposed. In performance evaluation, we virtually simulated scale estimation error in 2D-3D reconstruction. There were no significant difference both in cup size error and positional error between 2D-3D reconstruction based automated planning and 3D-CT based automated planning when a scale estimation errors were equal and less than ±5%. As future direction, we will study whether scale estimation accuracy less than ±5% can be achieved or not in real clinical application.

Recommended
Recommended
More Related Content
Similar to 2011.11.22 第20回日本コンピュータ外科学会大会 統計アトラスに基づく単純X線画像からの人工股関節3次元カップ手術計画自動立案
Similar to 2011.11.22 第20回日本コンピュータ外科学会大会 統計アトラスに基づく単純X線画像からの人工股関節3次元カップ手術計画自動立案 (6)
Recently uploaded
Recently uploaded (10)
2011.11.22 第20回日本コンピュータ外科学会大会 統計アトラスに基づく単純X線画像からの人工股関節3次元カップ手術計画自動立案
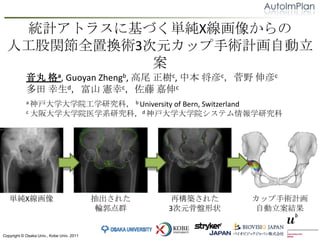
- 1. 統計アトラスに基づく単純X線画像からの 人工股関節全置換術3次元カップ手術計画自動立 案 音丸 格a, Guoyan Zhengb, 高尾 正樹c, 中本 将彦c,菅野 伸彦c 多田 幸生d,富山 憲幸c,佐藤 嘉伸c a 神戸大学大学院工学研究科, b University of Bern, Switzerland c 大阪大学大学院医学系研究科,d 神戸大学大学院システム情報学研究科 単純X線画像 抽出された 再構築された カップ手術計画 輪郭点群 3次元骨盤形状 自動立案結果 Copyright © Osaka Univ., Kobe Univ. 2011
- 2. はじめに Copyright © Osaka Univ., Kobe Univ. 2011
- 3. 研究背景 自動 手術計画 セグメン 自動立案 テーション [Otomaru et al., [Yokota et MICCAI 2009, al., MICCAI 2009] MedIA 2011] 3次元 骨盤・大腿骨3次元形状 3次元 CT画像 解剖学的特徴点 手術計画 客観的基準に基づいた手術計画を安定して立案するため, 我々は,人工股関節全置換術を対象として, 手術計画自動立案システムを研究・開発してきている. しかしながら,国外では3次元CT画像の撮影が日本ほど 一般的でないため,本システムが適用できない問題があ Copyright © Osaka Univ., Kobe Univ. 2011
- 4. 研究背景 骨盤側インプラン ト(カップ) 自動 手術計画 2D-3D 自動立案 セグメン 骨盤再構成 [Otomaru et テーション [Zheng, MICCAI al., MICCAI [Yokota et 2009] 2009, MedIA al., MICCAI 2009] 2011] 単純 3次元 骨盤・大腿骨3次元形状 3次元 X線画像 CT画像 解剖学的特徴点 手術計画 そこで今回,単純X線画像からの2D-3D骨盤再構成手法 (Zheng, MICCAI 2009)を用いることで,単純X線画像を入力と した 手術計画自動立案を行なう. 今回は特に,カップと呼ばれる骨盤側インプラントを対象 とする. Copyright © Osaka Univ., Kobe Univ. 2011
- 5. 実験材料と方法 Copyright © Osaka Univ., Kobe Univ. 2011
- 6. 実験材料 | 対象とした症例 大阪大学医学部付属病院で実際に手術された症例を用い た. 今回の評価では,Crowe分類に基づいて骨盤変形度を分類 し, 変形度が小さい(Crowe I 以下)症例のみを用いた. 28症例を学習データ,6症例を評価データとした. 変形度が小さい症例 変形度が大きい症例 (Crowe I) Copyright © Osaka Univ., Kobe Univ. 2011 (Crowe IV)
- 7. 実験材料 | 単純X線画像 2D-3D骨盤再構成 (Zheng., MICCAI 2009)のキャリブレーション に おいて必要な情報は,スケールパラメータのみだった. 本研究ではスケールパラメータは既知とし,3次元CT画像から 再構成された3次元骨盤形状から取得した. X線画像の仕様: 正面から撮影された股関節単純X線画像 線源-イメージングプレート間距離: 1,200 mm ピクセルサイズ: 0.1 x 0.1 mm2 Copyright © Osaka Univ., Kobe Univ. 2011 股関節2次元単純X線画像
- 8. 実験材料 | 統計アトラス 2D-3D骨盤再構成・手術計画自動立案はともに, 過去に手術された学習データから構築される統計アトラスを用 いる 2D-3D骨盤再構成のための骨盤統計形状モデル [Zheng, MICCAI:2009] … 学習データセット 手術計画自動立案のための統計アトラ ス Copyright © Osaka Univ., Kobe Univ. 2011 [Otomaru et al., CAOS:2009]
- 9. 方法 | 手術計画自動立案の概要 2次元単純 抽出された 再構成された 手術計画 X線画像 骨盤輪郭線 3次元骨盤形状 自動立案結果 1. X線画像が与えられて,live-wireを用いることで半自動的に骨盤輪郭線が抽出され る. 2. 抽出された輪郭線に骨盤統計形状モデルを当てはめることで,3次元骨盤形状が 再構成される. Copyright © Osaka Univ., Kobe Univ. 2011
- 10. 実験結果 Copyright © Osaka Univ., Kobe Univ. 2011
- 11. 実験方法 2D-3D骨盤再構成におけるスケールパラメータに着目し, スケールが正しく推定できた場合,スケールに誤差がある場 合の 手術計画自動立案性能をそれぞれ調べた. - 10% - 5% 正解値 + 5% + 10% (3次元CT画像から 再構成された 骨盤形状から取得) 評価項目: 1. 3次元CT画像から再構成された骨盤と比較したときの形状誤差 2. 熟練外科医計画とのカップサイズ誤差・カップ位置誤差 28症例を学習データ,6症例を評価データとして用い た. Copyright © Osaka Univ., Kobe Univ. 2011
- 12. 結果 | 2D-3D再構成された骨盤の形状誤差 p < 0.01 p < 0.05 p < 0.01 8 7 6 5 4 形状誤差(骨盤全体) 3 形状誤差(臼蓋周辺) 2 1 0 -10% -5% 0 +5% +10% スケール誤差が±5% 以下の場合,正解値の場合と比較し て, 形状誤差に有意差は見られなかった Copyright © Osaka Univ., Kobe Univ. 2011
- 13. 結果 | 手術計画自動立案結果 p < 0.05 16 p < 0.01 14 サイズ誤差 [mm] p < 0.05 12 位置誤差 [mm] 10 8 6 4 2 0 -2 -10% -5% 0 +5% +10% 2D-3D骨盤再構成 3次元CT スケール誤差が+10%の場合,3次元CT画像上で立案された 自動手術計画と比較して,有意に誤差が大きかった. スケール誤差が± 5%以内の場合,カップサイズ誤差には 有意差は見られなかった. Copyright © Osaka Univ., Kobe Univ. 2011
- 14. 手術計画立案結果例 サイズ誤差 48mm 50mm 48mm 52mm 位置誤差 2.7 mm 2.3mm 2.7 mm 11.0 mm 3次元CTから スケール誤差: 3次元CTから スケール誤差: 再構成 -5 % 再構成 + 10% スケール誤差が -5%の場合,3次元CTの場合とほぼ同じ位置 に設置された. スケール誤差が+10%の場合,3次元CTの場合と比べ,外側に 偏位した設置位置をとった. Copyright © Osaka Univ., Kobe Univ. 2011
- 15. おわりに Copyright © Osaka Univ., Kobe Univ. 2011
- 16. 考察とまとめ 本研究では,2次元単純X線画像を対象として, 3次元カップ手術計画自動立案を行った. 評価実験では,2D-3D骨盤再構成におけるスケール誤差が 手術計画自動立案結果に与える影響を調べた. 実験結果から,スケール誤差が±5%程度であれば, 3次元CTと同程度の性能を発揮できる可能性があると考えられ る. 現在,スケール誤差±5%の精度を達成するためのスケール キャリブレーション方法を検討中である. また,今後さらに多くの症例を用いた解析を行う. Copyright © Osaka Univ., Kobe Univ. 2011
- 17. Copyright © Osaka Univ., Kobe Univ. 2011