Biologically inspired collision avoidance system for self-driving cars
Paper is here: https://www.researchgate.net/publication/308673622_Reactive_Collision_Avoidance_using_Evolutionary_Neural_Networks
Biologically inspired collision avoidance system for self-driving cars
1. Hesham M. Eraqi and Mohamed Moustafa
Department of Computer
Science and Engineering
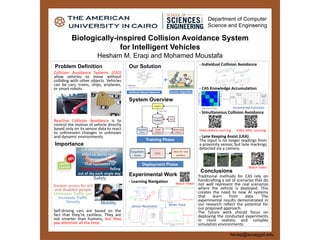
Biologically-inspired Collision Avoidance System
for Intelligent Vehicles
Problem Definition
Collision Avoidance Systems (CAS)
allow vehicles to move without
colliding with other objects. Vehicles
can be cars, trains, ships, airplanes,
or smart robots.
Reactive Collision Avoidance is to
control the motion of vehicle directly
based only on its sensor data to react
to unforeseen changes in unknown
and dynamic environments.
Self-driving cars are based on the
fact that they’re cashless. They are
not smarter than humans, but they
pay attention all the time.
1.3 Million people are
killed on world roads
every year.
That equivalent to
7 Boeing airplanes falling
out of sky each single day.
Safety
Mobility
Greater access for old
and disabled people
Eliminates Traffic Jam
Increases Traffic
Density
Importance
Our Solution
Genetic Algorithm
+
Training Phase
System Overview
Deployment Phase
Experimental Work
Conclusions
Traditional methods for CAS rely on
handcrafting a set of scenarios that do
not well represent the real scenarios
where the vehicle is deployed. This
creates the need to new AI systems
that learn from data. The
experimental results demonstrated in
our research reflect the potential for
our proposed approach.
The future work should focus on
deploying the conducted experiments
in more realistic and complex
simulation environments.
Incremental Evolution
Artificial Neural Network
Wider TrackSensor Resolution
Watch Video
- Learning Navigation
Video Before Learning Video After Learning
Watch Video
- Individual Collision Avoidance
- CAS Knowledge Accumulation
- Simultaneous Collision Avoidance
- Lane Keeping Assist (LKA)
The input is no longer readings from
a proximity sensor, but lane markings
detected via a camera.
heraqi@aucegypt.edu