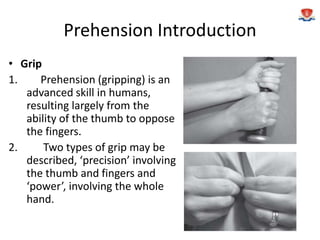
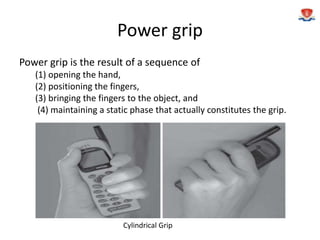
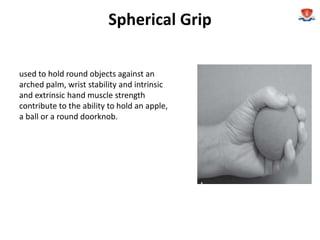
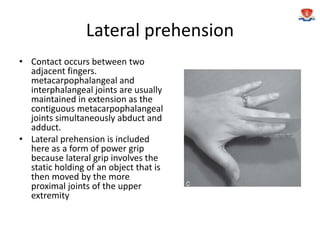
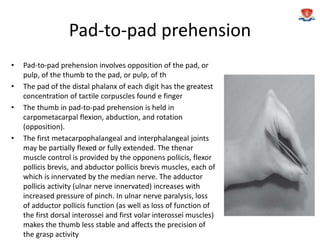
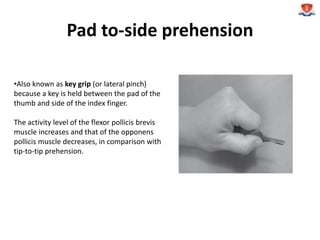
This document discusses prehension, or gripping, which is made possible by the opposable thumb in humans. It describes two main types of grip: power grip, which involves the whole hand and is used to hold cylindrical or spherical objects, and precision grip, which requires finer motor control and pad-to-pad, tip-to-tip, or pad-to-side contact between the thumb and fingers. Specific grips like hook, spherical, and lateral grips are subtypes of power grip. Precision grips depend on intact sensation and muscles like the flexor pollicis brevis and opponens pollicis. The functional position of the wrist and fingers optimizes power and efficiency of grip.