VIP Call Girl Bhilai Aashi 8250192130 Independent Escort Service Bhilai
roboticexoskeleton-131121234231-phpapp01 (1).pptx
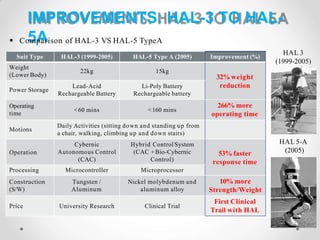
1. IMPROVEMENTS: HAL-3 TO HAL-
5A
HAL 5-A
(2005)
HAL 3
(1999-2005)
Suit Type HAL-3 (1999-2005) HAL-5 Type A (2005) Improvement (%)
Weight
(Lower Body)
22kg 15kg
32%weight
reduction
Power Storage
Lead-Acid
Rechargeable Battery
Li-Poly Battery
Rechargeable battery
Operating
time
<60 mins <160 mins
266% more
operating time
Motions
Daily Activities (sitting down and standing up from
a chair, walking, climbing up and down stairs)
Operation
Cybernic
Autonomous Control
(CAC)
Hybrid Control System
(CAC +Bio-Cybernic
Control)
53% faster
response time
Processing Microcontroller Microprocessor
Construction
(S/W)
Tungsten /
Aluminum
Nickel molybdenum and
aluminum alloy
10% more
Strength/Weight
Price University Research Clinical Trial
First Clinical
Trail with HAL
Comparison of HAL-3 VS HAL-5 TypeA
2. IMPROVEMENTS –BIOELECTRICAL
SENSING
Bio-Cybernic Control System
- HAL exoskeleton moves
according to the thoughts of its
wearer.
- Muscle movements are based on
nerve signals sent from the brain
to the muscles – signals that are
registered in very weak traceson
the surface of the skin.
- HAL identifies these signals
using a sensor, sends a signal to
the suit’s power unit and
computer control the movement
of the robotic limbs along with
the human limbs
3. HAL 5-B
(2008)
Suit Type HAL-5 Type A
(2005 –Ref)
HAL-5 Type B
(2008)
HAL-5 Type C
(2011)
Improvement
(%)
Weight Lower body -
15kg
Full Body Weight
(< 23kg)
Full Body Weight
(<20 kg)
13% weight
reduction
Power
Storage
Li-Poly
Rechargeable
battery
Li-Ion Battery Rechargeable battery
Operating
time
Approx. 2 hrs 40
mins
Approx. 3 hrs Approx. 5 hrs 166% more
operating time
Motions Daily Activities(s
walking
itting down and standing up from a chair,
, climbing up and down stairs)
Operation Hybrid Control System (CAC +Bio-CybernicControl)
Agility N/A Hold and lift heavy
objects up to 60 kg
Hold and lift heavy
objects up to 70 kg
16% more
agility to lift
Processing Microprocessor Intel Atom 6%more
response time
Construction
(S/W)
Nickel molybdenu m, aluminum alloy Carbon Magnesium
Alloy
Nil
Price (Lease) Clinical Trial USD 2,500/mth USD 2,300/mth 5%lower lease
price
IMPROVEMENTS: HAL-5A TO HAL-
5C
HAL 5-A
(2005)
HAL 5-C
(2011)
Comparison of HAL-5 Type A VS HAL-5 Type B VS HAL-5 Type C
4. 1.5
0.8
0.5
0.2
0.1
0.15
1.6
1.8 1.8 1.8
1
2.5
2.4
1.7
1.5
0
0.5
1
1.5
2
2.5
3
Microcontroller
(1999-2005)
Microprocessor
(2005-2008)
Intel Atom (2008-
2011)
Intel Atom (2011-
Present)
Intel Atom (Future)
HAL 3 HAL 5(2005) HAL 5(2008) HAL 5(2011) HAL 5(FG)
Response Time (s)
http://www.cpu-world.com/info/Intel/Intel_Atom.html
DEVELOPMENT –RESPONSE
TIME
Up to
7.5X
Reduce
Response
Time
1. Natural movement
2. Avoid accident
3. Move faster
Frequency (GHz) TDP (Watt)
Factor affecting in Response time are classified as
1. Software algorithm, 2. Processor speed,3. Sensor’s
sensitivity and itsfeedback.
5. 30
20
10
0
60
70
80
Lower Limb
HAL 3
Lower and Upper
Limb
HAL 5(2005)
Full Body Suit
HAL 5(2008)
Full Body Suit
HAL 5(2011)
Agility (kg)
DEVELOPMENT –WEIGHT
LIFTING
Source: Cyberdyne, Japan, www.cyberdyne.jp
Up to
2.6X
More weight
can be lifted
Kg
50
40
1. Possible more applications that
require heavy lifting such as
heavy labour industry,
warehouse, rescue, nursing, etc.
6. DEVELOPMENT –
MATERIAL
*Maintain Strength to Weight Ratio
Hal 3
(50kg)
Hal 5 (2005 – 2008)
(23kg)
950
450
300
Hal 5 (2011)
(15kg)
10%
Up
S/W
1.5 X
Reduce
Weight*
http://helix.gatech.edu/Classes/ME4182/2000S1/Webs/reg_mech/prod/materials/strengthvsdensity.html
1. Quicker Mobility
2. Needs less motor torque
to drive the body
3. Easy to wear
7. 18.4
18.6
18.8
19
19.2
19.4
19.6
19.8
20
20.2
0
10
20
30
40
50
60
IMPROVEMENT IN WEIGHTOF
HAL SUIT AND STRENGTH/WEIGHTRATIO
Weight (Kg) Strength/Weight (Mpa/Kg)
DEVELOPMENT –
MATERIAL
Source: Cyberdyne, Japan, www.cyberdyne.jp
1. Quicker Mobility
2. Needs less motor torque
to drive the body
3. Lighter to make asuit
and easy to wear
H1AL-3
(Tg-AlAlloy)
HAL2-5 (2005)
Ni-Mo-AlAlloy
HAL3-5 (2008)
Ni-Mo-AlAlloy
HAL-54 (2011)
C-MgAlloy
8. DEVELOPMENT –ENERGY
STORAGE
0
50
100
150
200
250
300
350
HAL-3 HAL-5 B HAL-5 C
Operating
time
(min)
20
40
60
80
100
120
140
160
lead acid Ni-Iron NiCa NiMH li-ion li-polymer
Energy
density
(Wh
/
kg)
Hal-5B
(2005-
2008)
Hal-5C
(2011)
Hal-3
(1999-
2005)
0
Up to
5X
Energy
Density
Up to
5X
Operating
Time
Source: http://blog.genport.it/?p=133
Comparison of Energy Density for battery materials Battery storage used for HAL
1. More usage time and less charging
2. Compact and portable battery pack is possible
3. Improve suit’s form factors
9. CONTENT
S
22
Introduction
How it Works
Applications
Evolution of Hybrid Assistive Limb (HAL)
Improvements of the HAL suits
Future improvements for the HALsuits
Robotics Market
Future Entrepreneurial Opportunities
Summary and Conclusion
10. FUTURE IMPROVEMENT OF HAL
SUITS
Strength/Weight
Rewalk
HAL 5(2005)
Future HAL
Current Standing of HAL suit and expectation for future HAL
Berkeley Lower Extremity
Exoskeleton (BLEEX)
HAL 5(2011)
11. Consideration for Our Next Generation Hal Suit for future opportunities of HAL
Market
Opportunities,
Market Shares
and Types of
Applications
Low Cost
Material
Improve
Operating
Time (Power
Storage)
Enhanced
Sensor
Performance
Low Cost
Production
Performance
Cost
FUTURE IMPROVEMENT OF HAL
SUITS
12. PERFORMANCE IMPROVEMENT –
POWER STORAGE
Current situation:
• Battery pack weighs 3kg.
• Continuous usage lasts less than 3
hours.
• Battery type: Lithium-Ion
Alternatives in the future
(7-10 years later)
• Lithium-Sulphur (Li-S) Batteries
http://www.barnardmicrosystems.com/L4E_batteries.htm
IMPROVE
OPERATING
TIME
Li-S Prototype
http://www.wfs.org/blogs/len-rosen/energy-update-lithium-
sulfur-batteries-waste
13. PERFORMANCE IMPROVEMENT –
POWER STORAGE
Source: Tarascon, J , 2010. Key Challenges in future Li-battery research.
Philosophical Transactions of the Royal Society 368: 3227-3241
Current HAL
(Li-Ion)
Future HAL
(Li-S)
High Energy Density in Li-S enables HAL
more operating time for less weight (Wh/Kg)
14. PERFORMANCE IMPROVEMENT –
POWER STORAGE
Current HAL
Future HAL
Up to
x2
Energy
Density
http://www.barnardmicrosystems.com/L4E_batteries.htm
Future Opportunities forFuture
Applications for HALwith
• Higher power and energy density
• Lighter and longer cycle times
• Cost effective and competitive
• Easy to Manufacturefor
productivity
15. PERFORMANCE IMPROVEMENT –RESPONSE
TIME
Enhanced
Sensor
Performance
Current situation:
• Slow synchronization between limb nerve, motion sensor
and driver.
• Room for improvement in speed of signal processing and
energy consumption from theprocessor
Alternatives in the future
• Shrink, SoC Atom Processor for low
cost, power consumption with
multi-core processing capability.
• Scaling in Bioelectronic IC
fabrication enables packing of
transistors required in a single IC
and creates additional room for
other components.
Sensors
16. 2011 2013 2014 and beyond
FUTURE PERFORMANCE
IMPROVEMENT –
RESPONSE
TIME
Source: http://www.extremetech.com/computing/116561-the-death-of-cpu-scaling-from-one-core-to-many-and-why-were-still-stuck
Intel’s Future AtomArchitecture
Future Opportunities for Future
Applications for HAL with
• Low power multicore processor
enables quicker response time
for lag free movement
• Help synchronization quicker
• Reduce in Chip size enable low
energy consumption and space
required
2008
Pack more cores into a single SoC
(low power and heat, high speed processing)
17. PERFORMANCE IMPROVEMENT –RESPONSE TIME
WITH SCALING BIOELECTRICAL (MUSCLE)
SENSOR ICS
Muscle Sensor v1
(HAL-5A)
Muscle Sensor v2
(HAL-5B)
Muscle Sensor v3
(HAL-5C)
9
8
7
6
5
4
3
2
1
0
Muscle sensor v1 Muscle sensor v2 Muscle sensor v3
HAL 5 (2005) HAL 5 (2008) HAL 5 (2011)
http://www.scribd.com/doc/123001077/Advancer-Technologies-Muscle-Sensor-v2-Manual
Dimension (inxin)
Voltage Used (V)
0
10
20
30
40
50
60
Muscle sensor v1 Muscle sensor v2 Muscle sensor v3
HAL 5(2005) HAL 5(2008) HAL 5(2011)
Gain Setting (kW)
Price (USD)
Up to
2X
Size and
Power
Up to
4X
Gain
Setting
Future Opportunities
for Future
Applications for HAL
with
• Lower power
consumption
• Reduce no. ofICs
and size ofsensor
create extra room
for other
components
• Improve gain
setting for better
sensor accuracy
and response time
Scaling Pack more transistors into a
single IC and thus increase freq.
(speed), allow low power and heat
Function of Bio-
Electronic sensor IC
19. ENTREPRENEUR OPPORTUNITIES
WITH LOW COST
MATERIAL
LOW COST
MATERIAL
Current situation:
• Base material used:
• Carbon Magnesium alloy
- Weighted 15kg
- US $40-65/kg
• Base material cost:
• Approx. US $600-975/suit
Alternatives in the future
• Magnesium Reinforced Polycarbonate
• US$20-50/kg, Est. US$300-750/suit
• Pro: Low Cost Material
Future Opportunities for Future
Applications for HALwith
- Reduction in cost createsgreater
market share
- Polycarbonate enable easy molding
for quick production and increase
productivity
21. Prices of HAL 5 Half Suit VS Full
Suit
34
HAL 5 – HalfSuit HAL 5 – FullSuit
http://www.theaustralian.com.au/news/world/robots-to-the-rescue-as-an-aging-japan-looks-for-help/story-e6frg6so-1226494698495
-Indicative prices for Hospitals and Rehab centers. Leasing option is available
from US$2,300 per month.
- At this moment, can’t be bought-off the shelf.
http://news.cnet.com/8301-27083_3-20043544-247.html
22. CONTENT
S
35
Introduction
How it Works
Applications
Evolution of Hybrid Assistive Limb (HAL)
Improvements of the HAL suits
Future improvements for the HAL suits
Robotics Market
Future Entrepreneurial Opportunities
Summary and Conclusion
23. ROBOTICS
MARKET
- For domestic tasks
- Entertainment
- Handicap assistance
- Personal transportation
- Home security
- Medical robots
- Defense, rescue & security applications
- Humanoids
- Manufacturing
- Line assembly
- Bio-industrial
In 2012, about 3 million service robots
for personal and domestic use were
sold, 20% more than in 2011. The value
of sales increased to US$1.2billion.
1. Service Robots 2. Industrial Robots
http://www.ifr.org/service-robots/statistics/
24. Current applications of HAL:
- Eldercare and rehabilitation
- Disaster relief
- Heavy industries
Future
Forecast US$51.7b market size
for service & personal robotics
ROBOTICS
MARKET
- Consumer robotics, entertainment, leisure, military
Worldwide Robotics Market Growth 1. Product Strategy
• Upper, Lower, Full Body,
Rescue & Recovery
2. Pricing Strategy
• Lease <US$2000/mth
3. Target Market
• US, EU and Japan
4. Sales Strategy
• Rental to Hospitals, clinics,
Rescue agencies, heavy
labour industries and
Rehab Centres
25. FUTURE ENTREPRENEUR
OPPORTUNITY
HAL-assisted Rehab Centers /Hospitals
• Patients with physical, developmental conditions.
• Eldercare
Training for Hal-Therapists
• New training programs & centers for therapists to
use HAL-equipment.
• Also available to HAL suit customers
Manufactures and Suppliers
• Increase demand to produce more
materials, components and integration
parts.
26. FUTURE ENTREPRENEUR
OPPORTUNITY
Mobile HAL suit chargingstations
• Consumers can charge suit orexchange/purchase
battery packs.
Robot variations for games,sports
• Create new market segments for sports
and games.
Software Development Firms andDevelopers
• Creates apps ecosystem for better Hal suit software like
brain-wave control, healthcare feedback, etc.
Heavy-lifting services
• Existing movers, product assembly lines& warehousing
using the HALsuit.
27. Tim
e
Prese
nt
201
6
(Ext
.)
Drivers
Business
Market
(Int.
)
Produ
ct
Technolo
gy
R&
D
Full-body
Support
Suit
Singl
e Joint
Suit
HAL-5
(2005)
R&D by Tsukuba
University
Collaborate with Intel Inc, Medical Industries
in Europe, Heavy industries in Japan
Domestic and Global Market
2005 2011
Trends: Growth of global ageing population and
disabilities Market: Japan Domestic Hosipitals and
Rehabitilitation Centre
Trends: Need for Heavy Labour and
Rescue Works Market: Heavy industries
and Tough labour works
Founded Cyberdyne in
2008, Produced 500
units per annum
HAL-5
(2011)
Region
al
Joint
Suit
Batte
ry
Use
d
Sensor
s/
Process
orMateri
al
Hardwa
re
Softwa
re
Glob
al
Mark
et
Acceleration/COG/Angular
Sensors/ Muscle Sensor v1,
Microprocessor
Nickel molybdenum and aluminum alloy Carbon Magnesium
Alloy
Acceleration/COG/Angular
/Bioelectrical (Muscle Sensor v3)/COP
Sensors/Intel Atom (Z540)
Li-Poly Op: 2 hr 40mins Li-Ion Op: Up to 3hrs Hi Capacity Li-Ion Op: Up
to 4hrs
HAL-5 (2011-
2013)
HAL-7
(2016)
Magnesium
Reinforced
Polycarbonate
Lithium-
Sluphur Li-Ion
Op: > 5hrs
MEMS sensors
/ Bay Trail
Processors
Uppler/Lower Limb Suit Full-body Support Suit Tungsten Made Suit Heavy Industry Suit Polycarbonate
Suit
Cybernic Autonomous Control (CAC) + Hybrid Control System (CAC +Bio-Cybernic Control)
SUMMARY - ROADMAP OF
HAL
28. • HAL suit – The leader in robotics exoskeleton
• Showed improvements and commitment to the success of the product.
• Developments in key areas that will impact the performance and cost of
the HAL suit.
• Growing trendin robotics market.
• Entrepreneurship opportunities
CONCLUSIO
N
30. 1F. Ichihashi, Y
.Sankai, S. Kuno, Development of Secure Data Management Server for e-
Health Promotion System, International Journal of Sport and Health Science,Vol.4, pp. 617-
627, 2006
2H. Toda, T. Kobayakawa, Y
. Sankai, A multi-link system control strategy based biologilcal
movement, Advanced Robotics, vol.20 no.6, pp. 661-679, 2006
3H. Toda, Y
.Sankai: Three-dimensional link dynamics simulator base on N-single-particle
movement, Advanced Robotics, vol. 19, no. 9, pp. 977-993, 2006
4H. Kawamoto, Y
. Sankai: Power assist method based on phase sequence and muscle force
condition for HAL, Advanced Robotics, vol.19, no.7, pp. 717-734, 2005
5S. Lee, Y
.Sankai: Virtual Impedance Adjustment in Unconstrained Motion for Exoskeletal
Robot Assisting Lower Limb, Advanced Robotics, vol.19, no.7, pp. 773-795, 2005
6K. Suzuki, G. Mito, H. Kawamoto, Y
.Hasegawa and Y
.Sankai: Intention-based walking
support for paraplegia patients with Robot Suit HAL, Advanced Robotics, vol. 21, no. 12, pp.
1441 – 1469, 2007
REFERENC
ES