
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Control Induction Motor Speed using IOT
Similar to Control Induction Motor Speed using IOT (20)
Recently uploaded
Recently uploaded (20)
Control Induction Motor Speed using IOT
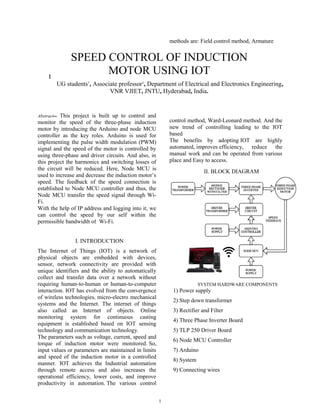
- 1. 1 Abstract-- This project is built up to control and monitor the speed of the three-phase induction motor by introducing the Arduino and node MCU controller as the key roles. Arduino is used for implementing the pulse width modulation (PWM) signal and the speed of the motor is controlled by using three-phase and driver circuits. And also, in this project the harmonics and switching losses of the circuit will be reduced. Here, Node MCU is used to increase and decrease the induction motor’s speed. The feedback of the speed connection is established to Node MCU controller and thus, the Node MCU transfer the speed signal through Wi- Fi. With the help of IP address and logging into it, we can control the speed by our self within the permissible bandwidth of Wi-Fi. I. INTRODUCTION The Internet of Things (IOT) is a network of physical objects are embedded with devices, sensor, network connectivity are provided with unique identifiers and the ability to automatically collect and transfer data over a network without requiring human-to-human or human-to-computer interaction. IOT has evolved from the convergence of wireless technologies, micro-electro mechanical systems and the Internet. The internet of things also called an Internet of objects. Online monitoring system for continuous casting equipment is established based on IOT sensing technology and communication technology. The parameters such as voltage, current, speed and torque of induction motor were monitored. So, input values or parameters are maintained in limits and speed of the induction motor in a controlled manner. IOT achieves the Industrial automation through remote access and also increases the operational efficiency, lower costs, and improve productivity in automation. The various control methods are: Field control method, Armature control method, Ward-Leonard method. And the new trend of controlling leading to the IOT based The benefits by adopting IOT are highly automated, improves efficiency, reduce the manual work and can be operated from various place and Easy to access. II. BLOCK DIAGRAM SYSTEM HARDWARE COMPONENTS 1) Power supply 2) Step down transformer 3) Rectifier and Filter 4) Three Phase Inverter Board 5) TLP 250 Driver Board 6) Node MCU Controller 7) Arduino 8) System 9) Connecting wires B. Sai Praneeth1 , B. Rakesh1 , K. Karthik Reddy1 , P. Jyothi Swaroop1 , J. Srinivasa Rao2 UG students1 , Associate professor2 , Department of Electrical and Electronics Engineering, VNR VJIET, JNTU, Hyderabad, India. SPEED CONTROL OF INDUCTION MOTOR USING IOT
- 2. 2 III. EXPLANATION OF COMPONENTS 1) POWER SUPPLY: A Power supply used to supply the electrical power to the electric load. This is usually applied to power converter which converts one form of an electrical energy to another form of an energy like mechanical, solar, electrical to solar energy. Depending on its structure, a supply can get energy from an Electrical energy transmission system. Different examples which convert voltages of AC to DC are mentioned below: 1) Energy storage devices like fuel cells & batteries 2) Electro-mechanical devices or systems like generators & alternators. 3) From solar energy which is obtained from the sun. 2) TRANSFORMER: Step Down Transformer: When AC is applied to the primary winding of the power transformer it can either do stepping down or up based on the value of DC needed. In this circuit the transformer rating of 230v/0-12v is used to perform the operation of step-down where a 230V AC converts into 12V AC across the secondary winding. The top of the transformer to be positive and the bottom negative is caused by altering the one of the inputs. The succeeding alteration will cause the reverse temporarily. 1A current rating of the transformer is used in the project and also, it gives isolation between power supply circuits and the power source.The are used to step down high voltages from 11000v to 220v or 110v and also from 220v or 110v to 10, 12, 20 or 24 volts etc. The induced EMF in the secondary winding is proportional to the number of turns on both the primary and secondary winding's Because, of same magnetic flux lines cut both coils of a transformer. The secondary output voltage will be less than the primary input voltage because the number of turns on the secondary winding is less than the number of turns on the primary winding. This type is called stepdown transformer . 3) RECTIFIERS: A rectifier is a device which converts alternating current (AC) to direct current (DC), which flows in only one direction and this process is known as rectification. Rectifiers are of different types like vacuum tube diodes, mercury-arc valves, copper and selenium oxide rectifiers, semiconductor diodes, silicon- controlled rectifiers and other silicon-based semiconductor switches. Rectifiers have numerous uses, but are found working as components of DC power supplies and high-voltage direct current power transmission systems. In a center tapped full wave rectifier, both positive and negative half cycles are rectified. So, no voltage is wasted at the output. Furthermore, the DC output produced by center tapped half wave rectifier is less smoother than the full wave rectifier output FILTERING UNIT: Filter circuits which are capacitors acts as a surge arrester and always follow the rectifier unit. This is also called as a bypassing capacitor or decoupling capacitor. It is used not used to leave the frequency of the DC to appear at the output but also to ‘short’ the ripple with frequency of 120Hz to ground. A load resistor R1 is connected so that a reference to the ground is maintained. C2R2 is used as a low pass filter, C1R1 is for bypassing ripples i.e. it passes only low frequency signals and bypasses high frequency signals. The load resistor should be 1% to 2.5% of the load. O, 1Ω f: It is for bypassing the high frequency disturbances. 10Ω f/25v: It is for maintaining the stability of the voltage at the load side. 1000Ω f/25v: It is for the reduction of ripples from the pulsating.
- 3. 3 4) Three Phase Voltage Source Inverters Single-phase VSIs and three phase VSIs covers low-range power and high- range applications respectively. The main purpose of these concepts is to provide a 3-phase voltage source, where the voltage, phase, amplitude of the voltages should always control and also most of the applications require sinusoidal voltage waveforms, arbitrary voltages are also required in some emerging applications like active filters, voltage compensators. A) SINUSOIDAL PULSE WIDTH MODULATION In Power electronics, The Sinusoidal Pulse Width Modulation (SPWM) is a well-known as wave shaping technique for realization, a high frequency triangular carrier signal, V1 is compared with a sinusoidal reference signal V of the desired frequency. Modulation index is the magnitude ratio of the reference signal (Vr,) to that of triangular signal (Vc). B) PULSE WIDTH MODULATION When a PWM signal is given to the gate of a power transistor then it causes the turn on and turns off intervals to change from one PWM period to another PWM period according to the same modulating signal. The frequency of a modulating signal is much lower than the PWM signal. So, the energy and its load of the motor depends mostly on the modulating signal 5) DRIVER CIRCUIT COMPONENTS Below mentioned components are used to amplify and triggering the pulses. They are: 1)OPTOCOUPLER 2) BUFFER IC 3) TRANSISTOR OPTOCOUPLER: Optocouplers normally in a small 6-pin or 8- pin IC package, however are basically a mix of two distinct devices an optical transmitter, typically a gallium arsenide LED and an optical receiver, like a photo-transistor or light- triggered diac. These two are isolated by a transparent barrier which obstructs any electrical flow between the two, however allows the passage of light. The essential thought is appeared in Fig.1, alongside the standard circuit image for an optocoupler. BUFFER IC –CD4050: The CD4050BC hex buffers are monolithic complementary MOS (CMOS) incorporated circuits built with N-and P-channel enhancement-mode transistors. These devices high light logic level conversion utilizing just a single supply voltage (VDD). The input signal high level (VIH) can exceeds the VDD supply voltage when these devices are utilized for logic level conversions. These devices are planned for use as hex buffers, CMOS to DTL/TTL converters 6) Node MCU: Node MCU is an opensource IoT platform, which includes firmware which keeps running on the ESP8266 Wi-Fi SoC from Espress if Systems, and equipment which depends on the ESP12 module. The term Node MCU naturally relates to the firmware instead of the development kits. The firmware utilizes the Lua scripting language which is based on the eLua project, and based on the Espress if Non-OS SDK for ESP8266. It utilizes many open source ventures, for example, lua- cjson and SPIFFS. 7) ARDUINO/EMBEDDEDSYSTEMS
- 4. 4 An embedded system is a special-purpose computer system designed to perform one or a few dedicated functions, often with real-time computing constraints. It is usually embedded as part of a complete device including hardware and mechanical parts. In contrast, a general-purpose computer, such as a personal computer, can do many different tasks depending on programming. Embedded systems have become very important today as they control many of the common devices we use. 7) SYSTEM: A PC framework enables clients to enter, control and store information. PC frameworks normally incorporate a PC, screen, console, mouse and other optional components. Yes, you need a PC to program Arduino. once programmed, it will run without the PC. The Arduino isn't powerful enough to run software. You would normally connect it via the network / internet to a server to process data 8) CONNECTING WIRES: connecting wires enables an electrical current to go from one point on a circuit then onto the next that because power needs a medium through which it can move. The vast majority of the connecting wires are comprised of copper or aluminum. Copper is cheap and great conductivity. Rather than the copper, we can likewise utilize silver which has high conductivity however it is too costly to even think about using. CONNECTION BETWEEN ARDUINO- DRIVER CIRCUIT - NODE MCU III. MATLAB SIMULATION FOR 3-PHASE VOLTAGE SOURCE INVERTER (180 DEGRESS CONDUCTION MODE) IV. HARDWARE IMPLEMENTATION MATLAB/ SIMULATION RESULT:
- 5. 5 HARWARE RESULT : V. CONCLUSION This project results the design and implementation of Internet of things for control the function of the 3-phase motor using technique of wireless communication. The major idea is long-distance connectivity between location of the machine and user and also to provide flexible. The major advantages of the developed system are to have a continuous monitoring over industrial applications and also providing e for agricultural application which control the induction motor. This work is mainly focused on the improvement of a reliable smart Industrial monitoring and controlling system. By this efficiency of the system can be further improved. VI. REFERENCES [1] “remote controlling and monitoring of induction motors using internet”, abdulkadir, cakır, hakan cali’s, gokhan turan suleiman demirel university, faculty of technology, department of electrical and electronic engineering, isparta turkey(2014). [2] “Real-Time Monitoring and Control of the Parameters of an Induction Motor", Department Of Electrical and Electronics Engineering, Technology of Faculty, Gazi UniversityTeknikokullar Ankara, Turkey . [3] Woodford, “induction motors”, [online]. Available: http://www.explainthatstuff.com/induction- motors.html. [accessed: 4- november- 2015]. [4] “Research on remote wireless monitoring system based on GPRS and MCU” , Zhong- Xuan, J. Xiau-Yu, H. Zhao-Fu, Z. Yan-Tao, D. Meng,Int. Conf. Computational Problem Solving ICCP 2010, Lijiang, China, Dec. [5]. J. S. Hsu and A. M. A. Amin, “Torque calculations of current-source Induction machines using the 1-2-0 coordinate system,” IEEE Trans. Ind.Electron. vol. 37, no. 1, pp. 34– 40, Feb. 1990. [6]. Shamsul Aizam Zulkifli, Mohd Najib Hussin, Abdul Salam Saad “MATLAB Arduino as a Low Cost Microcontroller for 3 phase inverter” 978-1- 4799-6428- 4/14/$31.00 ©2014 IEEE. [7] S.-J. Park, F.-S. Kang, M. H. Lee, and C.-U. Kim, “A new single-phase five-level PWM inverter employing a deadbeat control scheme,” IEEE Trans. Power Electron., vol. 18, no. 3, pp. 831–843, May 2003. [8] Y. Hinago and H. Koizumi, “A switched- capacitor inverter using series/ parallel conversion with inductive load,” IEEE Trans. Ind. Electron., vol. 59, no. 2, pp. 878–887, Feb. 2012.
- 6. 6
- 7. 6