営業(セールスエンジニア) 兼 新規事業開発室室長
Xamarin コミュニティエバンジェリスト
Microsoft MVP Visual Studio and Development Technologies
Xamarin MVP
連載・執筆
Build Insider Xamarin Tips
.NET開発テクノロジ入門2016年版
コミュニティ
Japan Xamarin User Group 主宰
Twitter: @ytabuchi
facebook: ytabuchi.xlsoft
Blog: Xamarin 日本語情報
4
田淵義人@エクセルソフト
4.
C# / .NET/ Visual Studio
フル “ネイティブ” アプリ
API 100% 移植
コード共通化
Xamarin
5
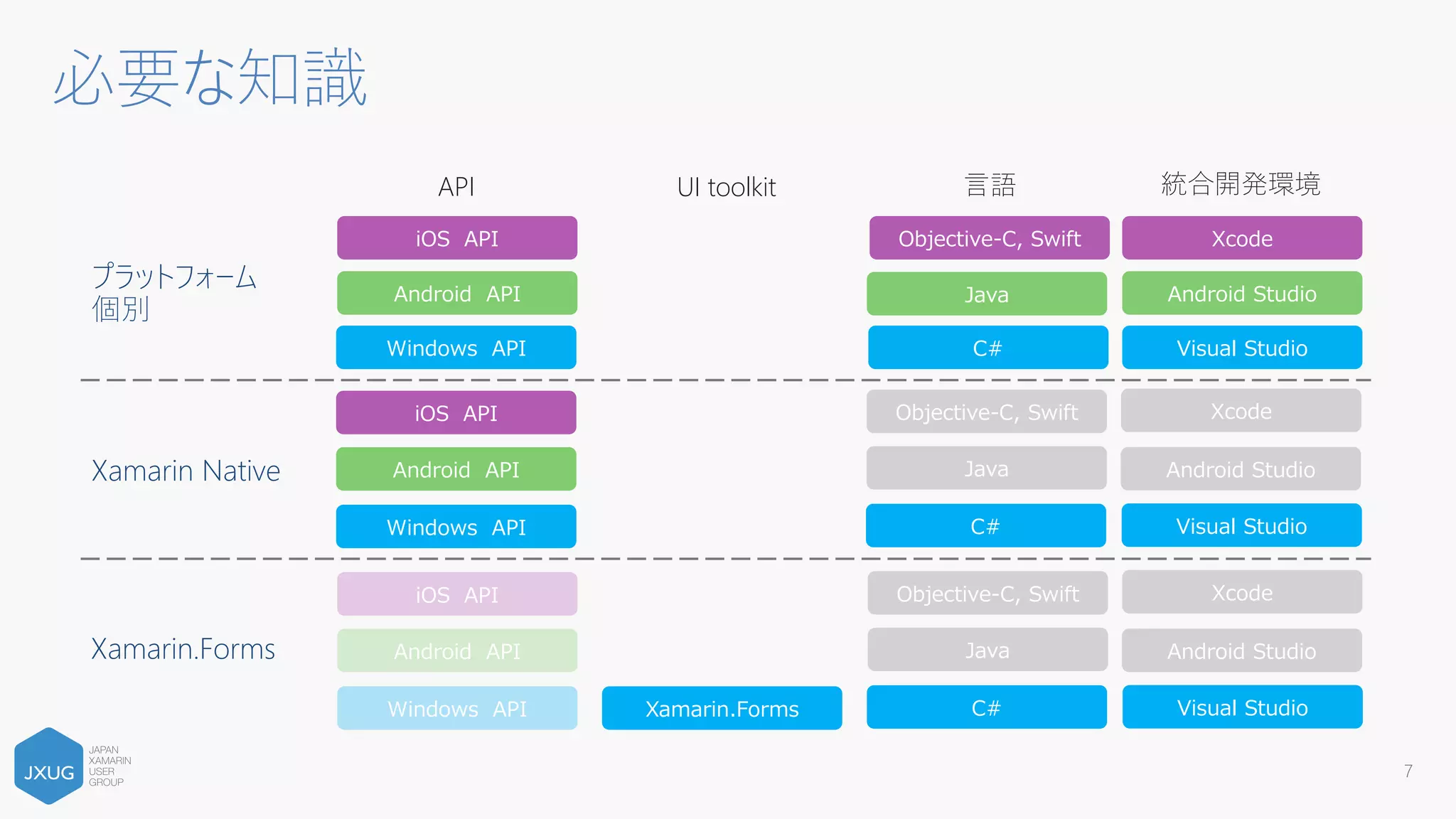
必要な知識
プラットフォーム
個別
Xamarin Native
iOS APIObjective-C, Swift Xcode
Android API Java Android Studio
Windows API Visual StudioC#
API 言語 統合開発環境
iOS API Objective-C, Swift Xcode
Android API Java Android Studio
Windows API Visual StudioC#
Xamarin.Forms
iOS API
Android API
Windows API
Objective-C, Swift Xcode
Java Android Studio
Visual StudioC#Xamarin.Forms
UI toolkit
7
Blog
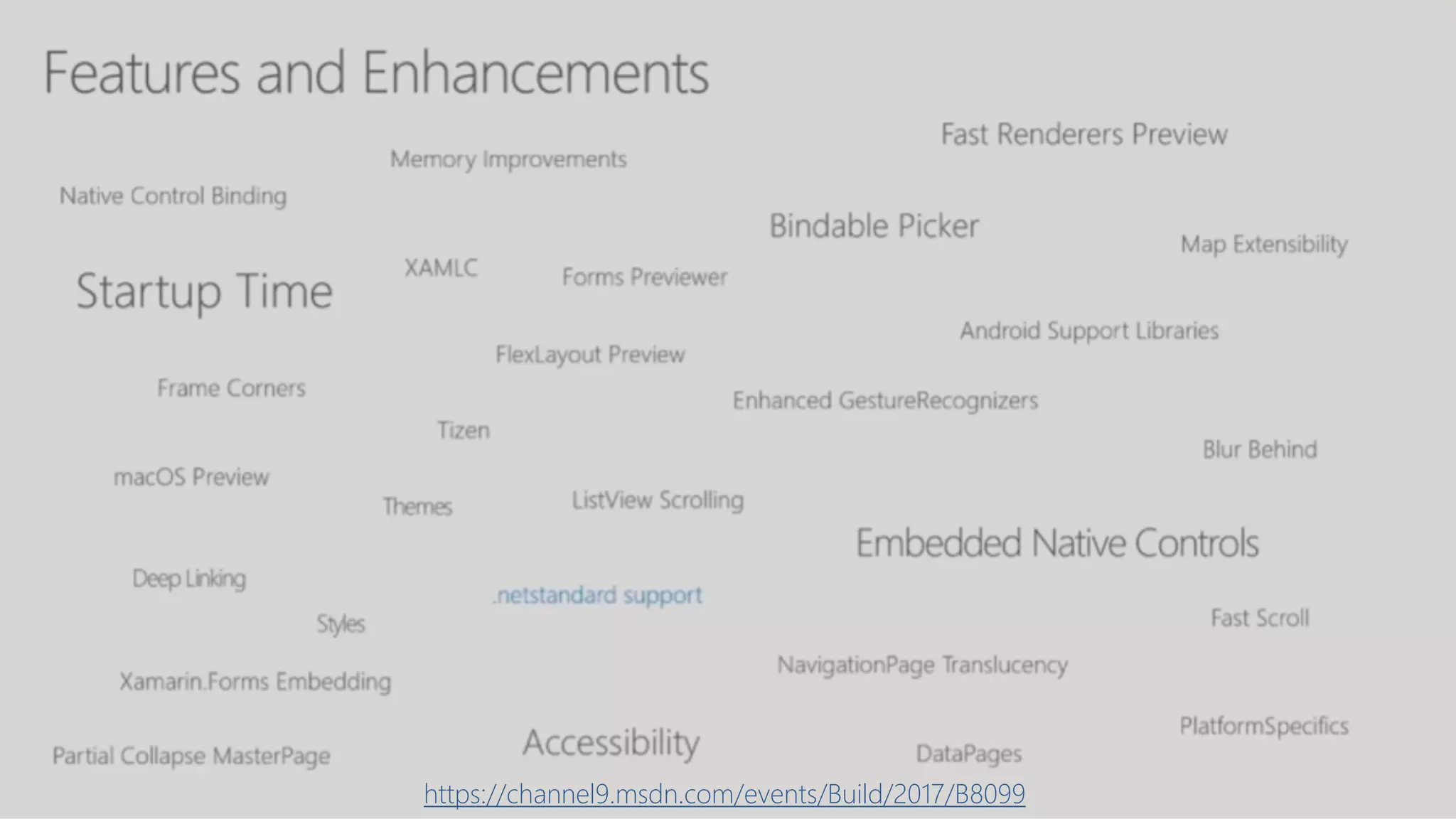
Make Your Xamarin.FormsApps Even Better (and Faster!)
Fast Renderers
Label, Image, Button をより高速に描画できるように。
Startup Time Improvements
Xamarin.Forms Init 時に時間が掛かっていた問題を解消。
28
Xamarin.Forms 2.3
24.
Xamarin.Forms for Mac/WPF/Gtk#
Xamarin.FormsEmbedding
Xamarin.Forms のコントールを Xamarin.iOS, Xamarin.Android, UWP から呼び出せるよ
うに。
Visual State Manager
Xamarin.Forms で Visual State をサポート。コントロールの focus や disabled などの時に
どのように表示されるかを指定可能に。
.NET Standard 2.0 サポート
藤原さんのブログ「.NET Standard のおさらい」を参照
CSS Layout & FlexLayout
デザイナーにデザインを依頼できるようになるかも。CSS Styling and FlexBox のフォーラムを
参照。
29
Xamarin.Forms 3.0
25.
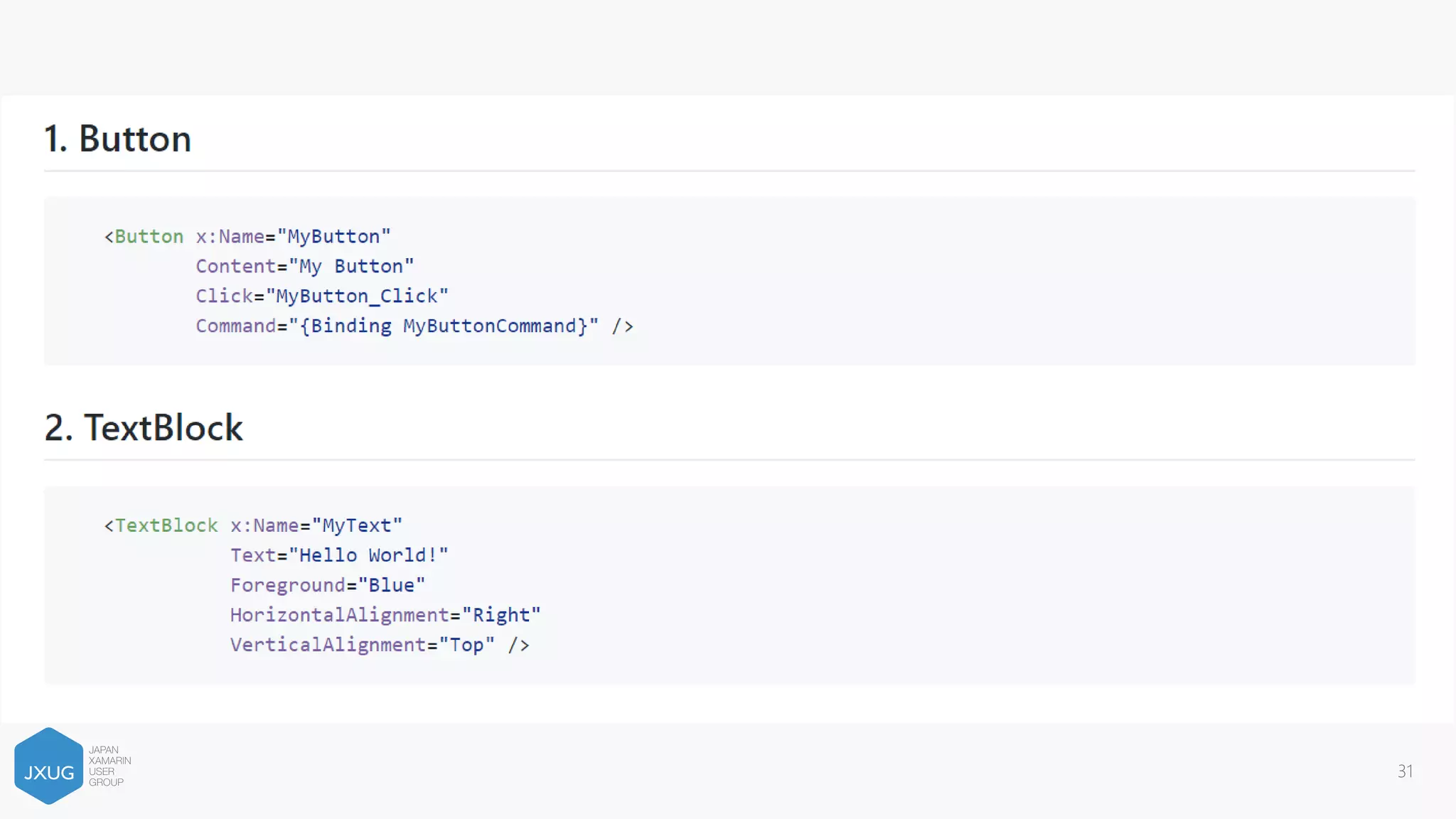
Introducing XAML Standardand .NET Standard 2.0
XAML Standard がサポートされると、Xamarin.iOS/Xamarin.Android のアプリに
<Label /> の代わりに <TextBlock /> を使えるようになります。
既存の開発者は何も変更はありません。
Windows Developer Blog の言う「既存」の開発者なので、恐らく WPF/UWP 側にコントロー
ル名が寄ると思われます。
レポジトリ
ドラフト
仕様を考えているところなので、Issue を投げてください。とのこと。
30
XAML Standard 1.0