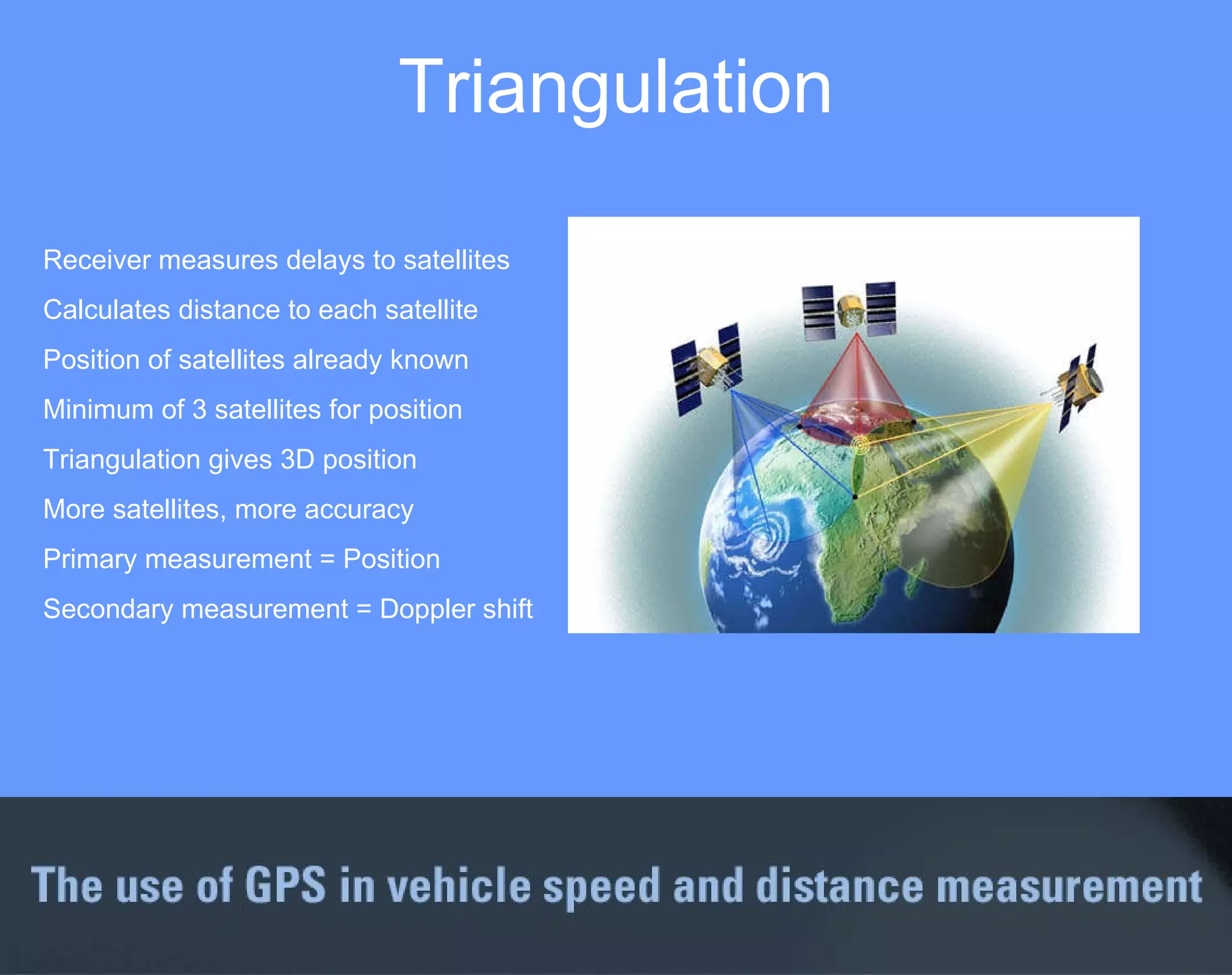
GPS uses 24 satellites in medium Earth orbit to provide location and time information to GPS receivers. It is owned and operated by the US military and provides free global coverage. A minimum of 3 satellites are needed to calculate a 2D position, while more satellites provide more accuracy. GPS receivers measure the time delay of signals from satellites to determine distance and use trilateration to calculate the user's 3D position.