The document discusses frequency response and its relationship to linear systems, describing how sinusoidal inputs yield steady-state sinusoidal outputs that differ in amplitude and phase. It introduces phasors to represent these relationships and discusses frequency domain plots such as Bode and Nyquist plots. The document also details transfer functions and various factors affecting them, including gain, integral and derivative factors, and first-order factors, along with examples of Bode plots.
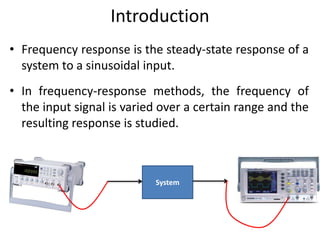
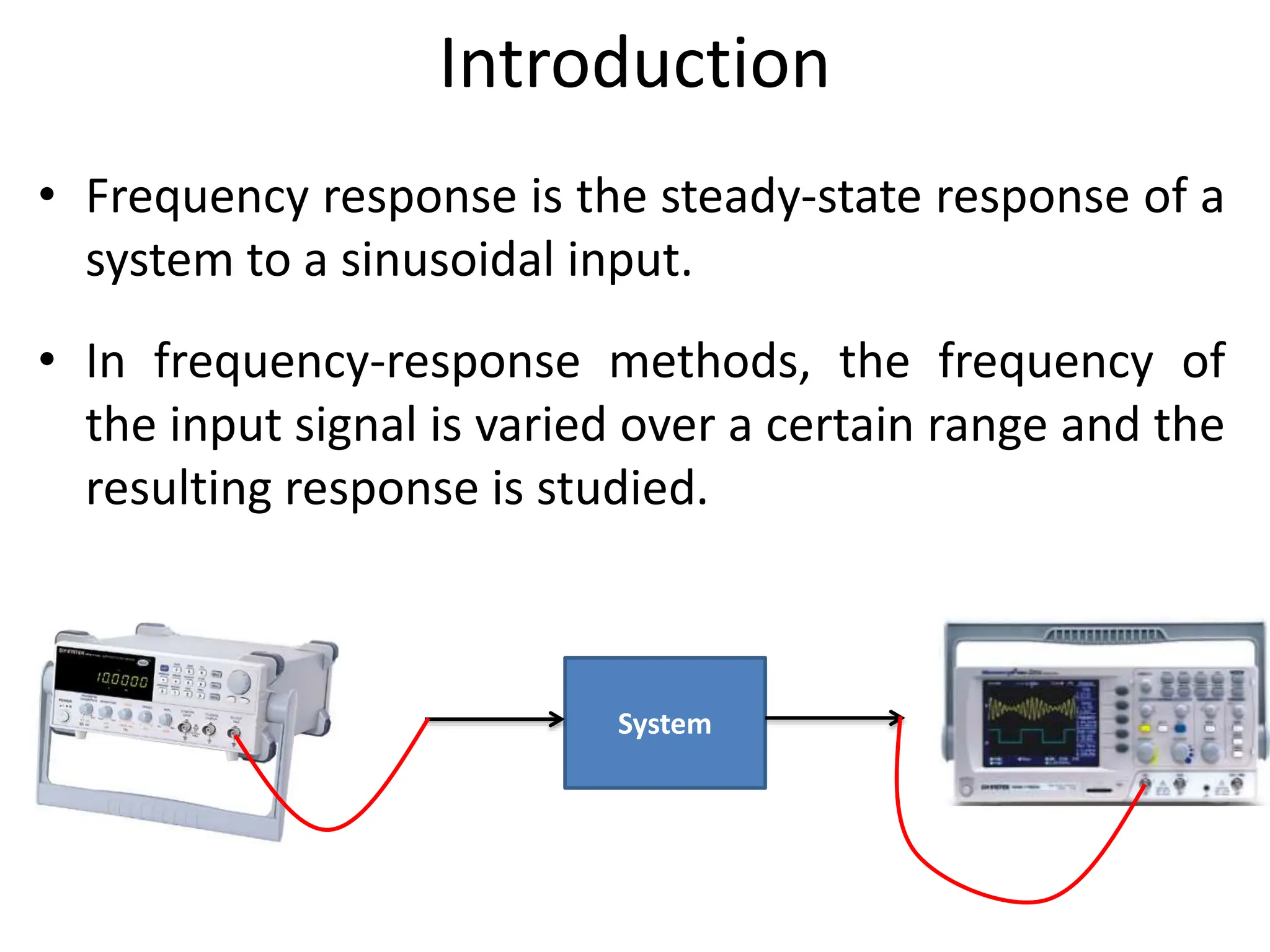
![The Concept of Frequency Response
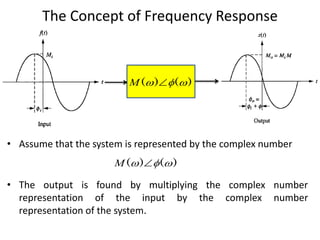
• Thus, the steady-state output sinusoid is
• Mo(ω) is the magnitude response and Φ(ω) is the phase response.
The combination of the magnitude and phase frequency
responses is called the frequency response.
)
(
)
(
M
)]
(
)
(
[
)
(
)
(
)
(
)
(
i
i
o
o M
M
M
](https://image.slidesharecdn.com/bode-240721081842-9008c9a3/85/Understanding-and-Implementation-the-Bode-Plot-7-320.jpg)


















![Circuit Network Analysis - [Chapter5] Transfer function, frequency response, ...](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613063859-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)



























