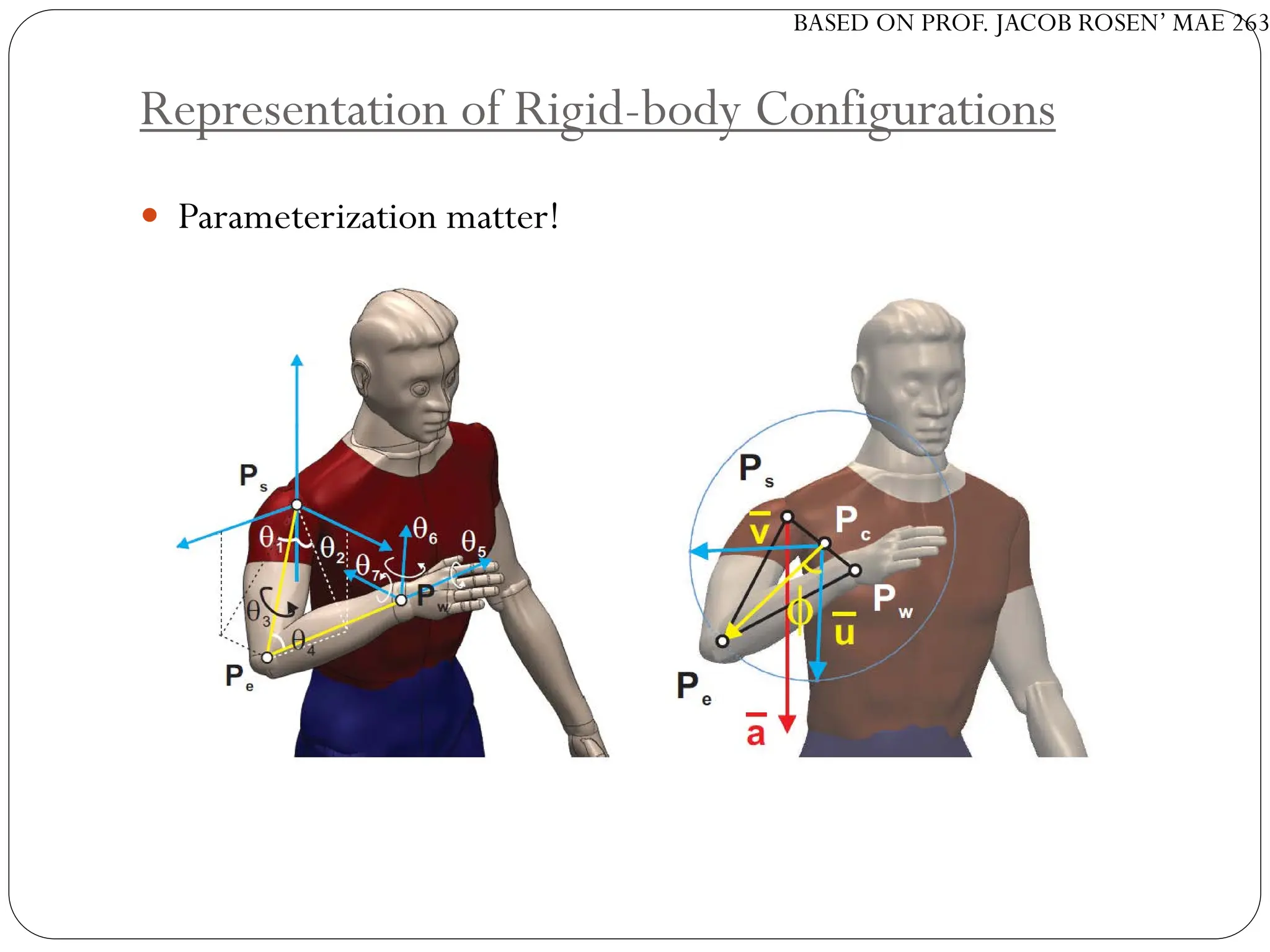
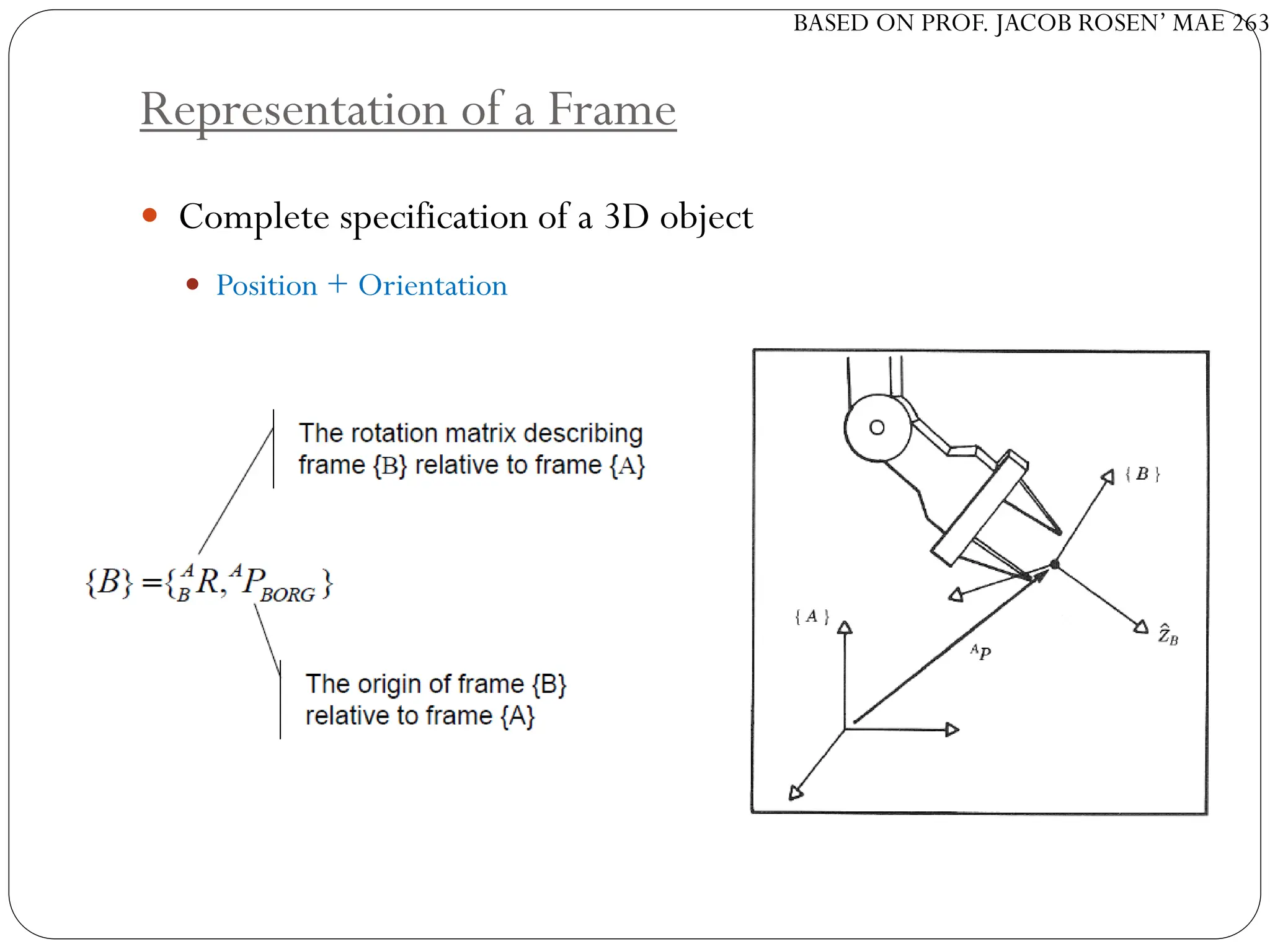
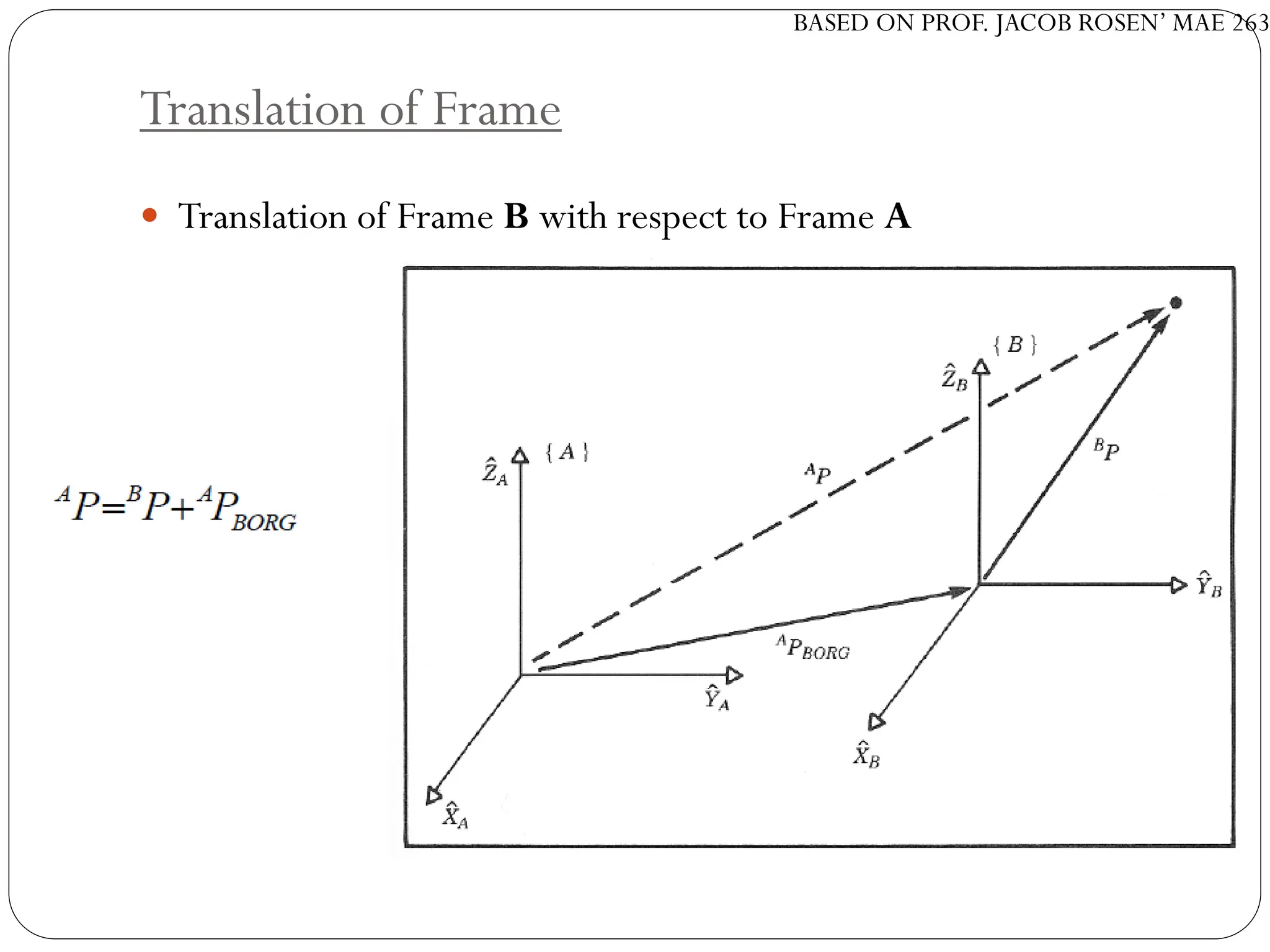
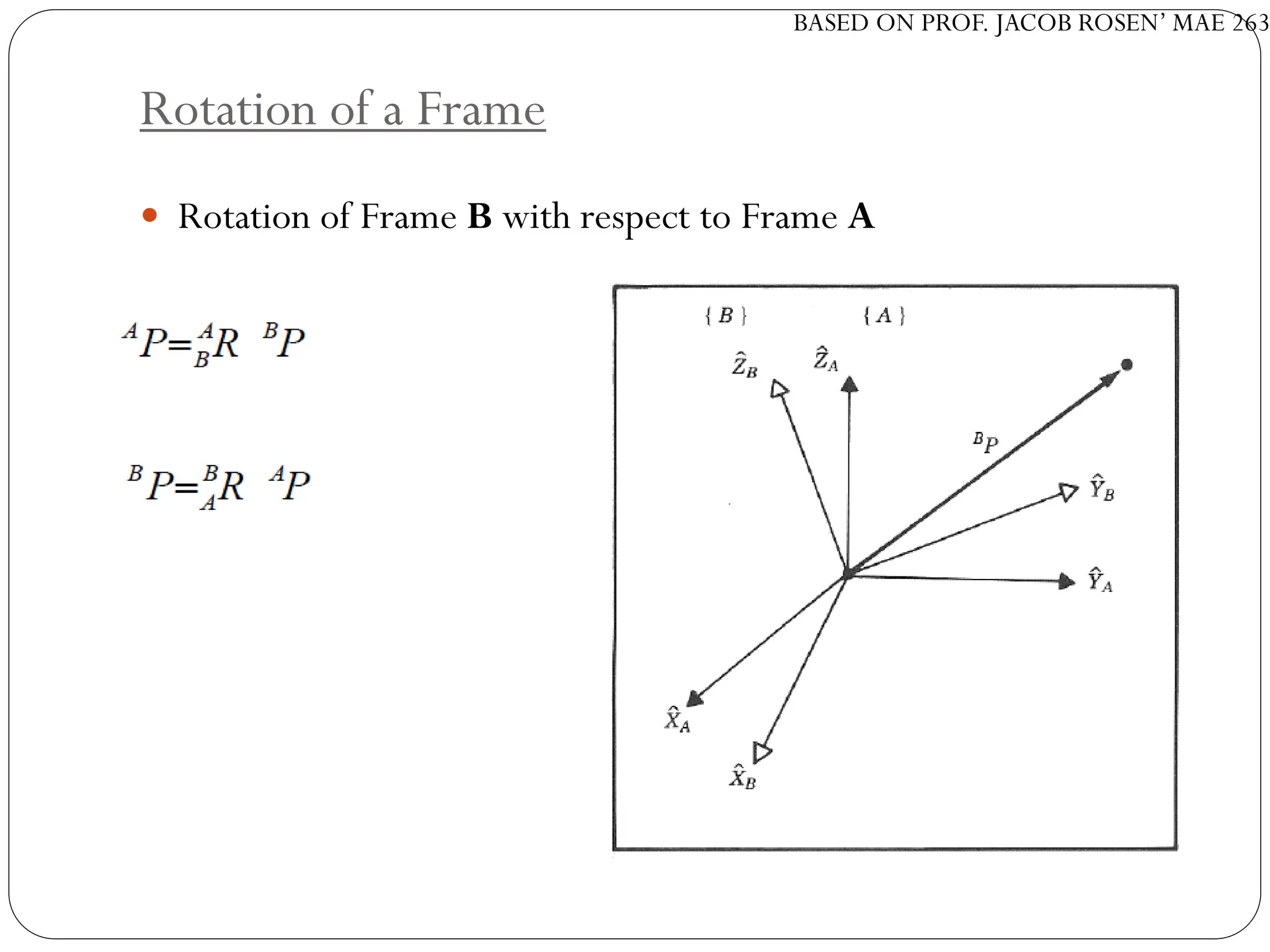
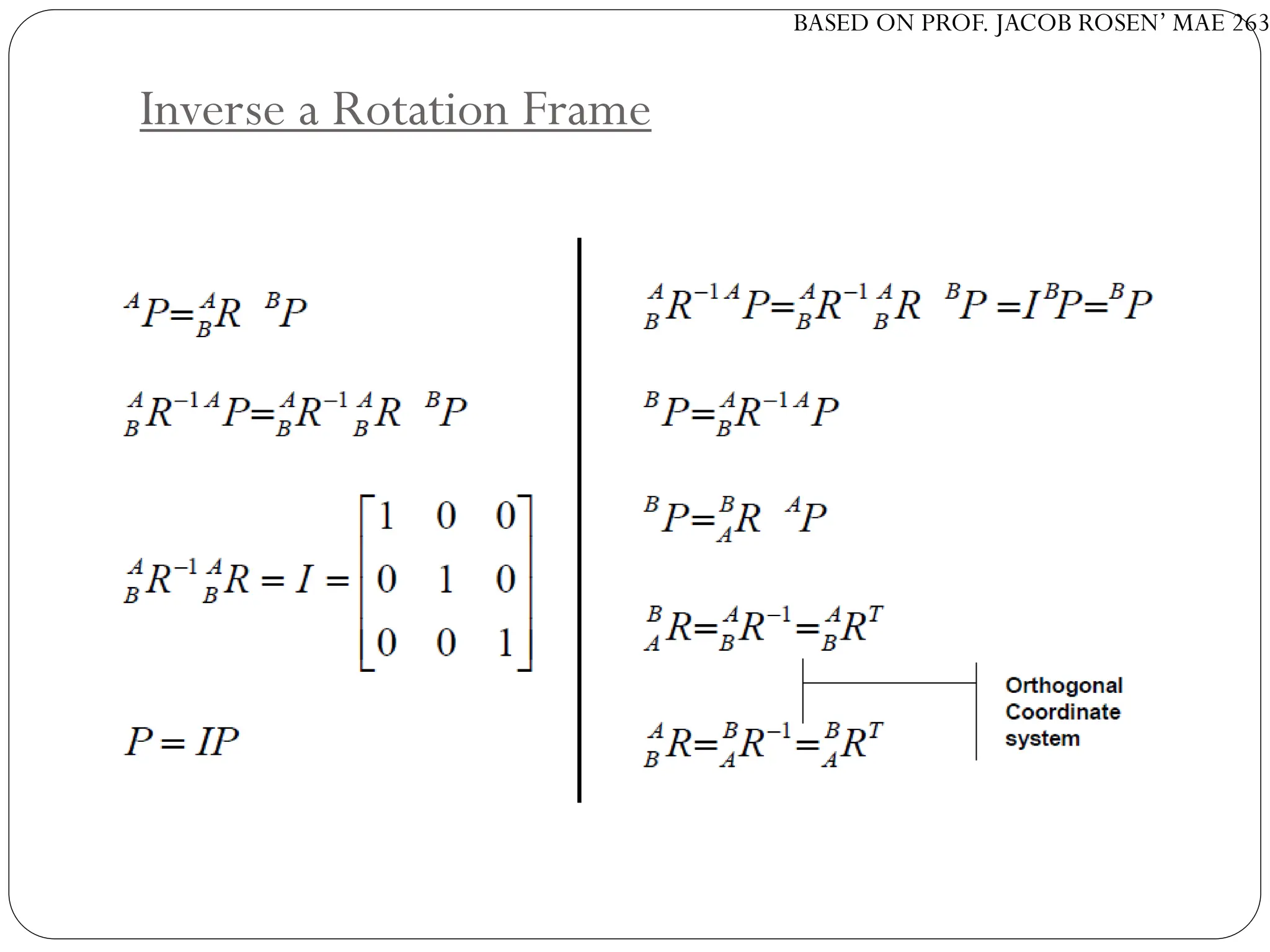
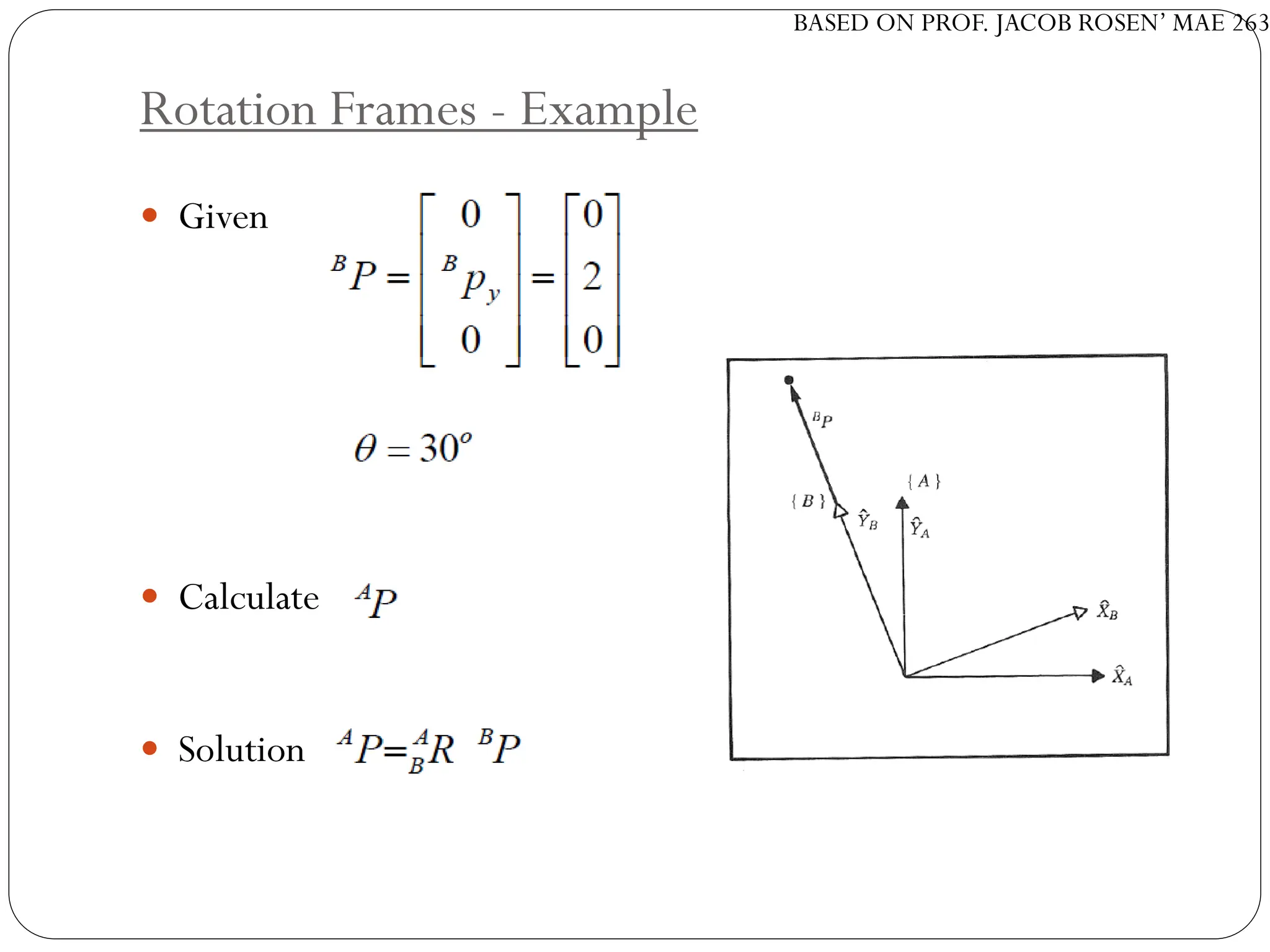
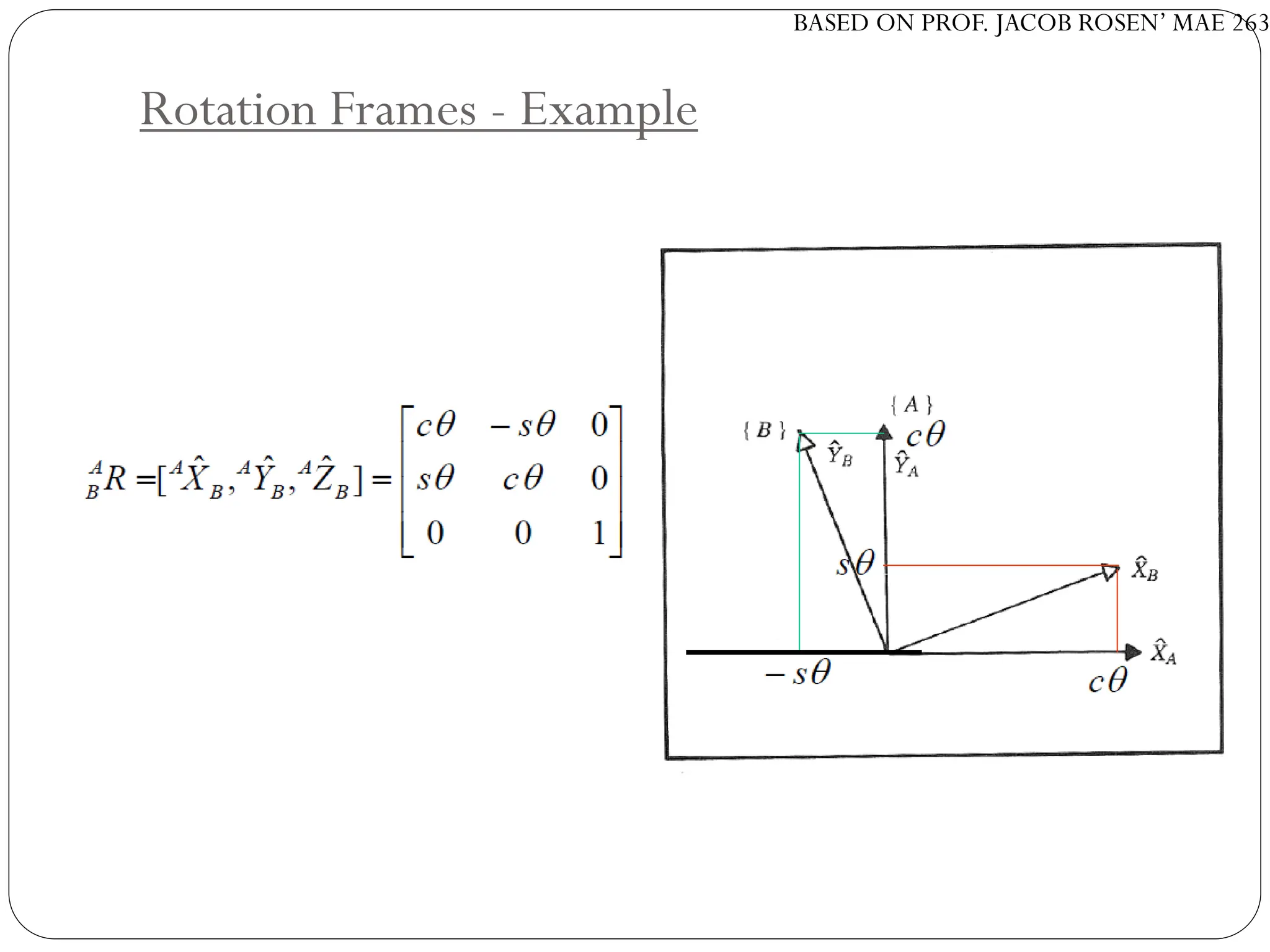
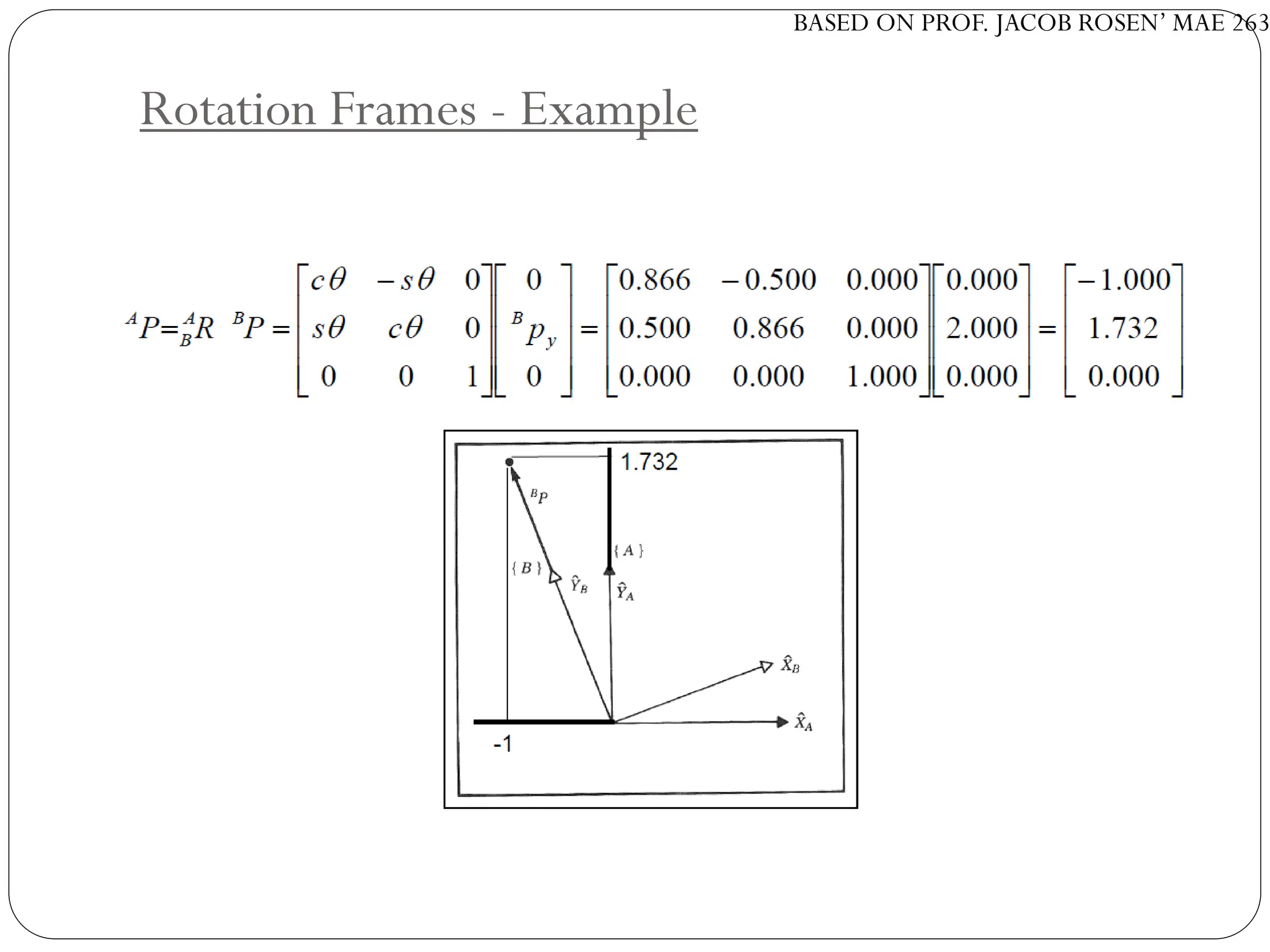
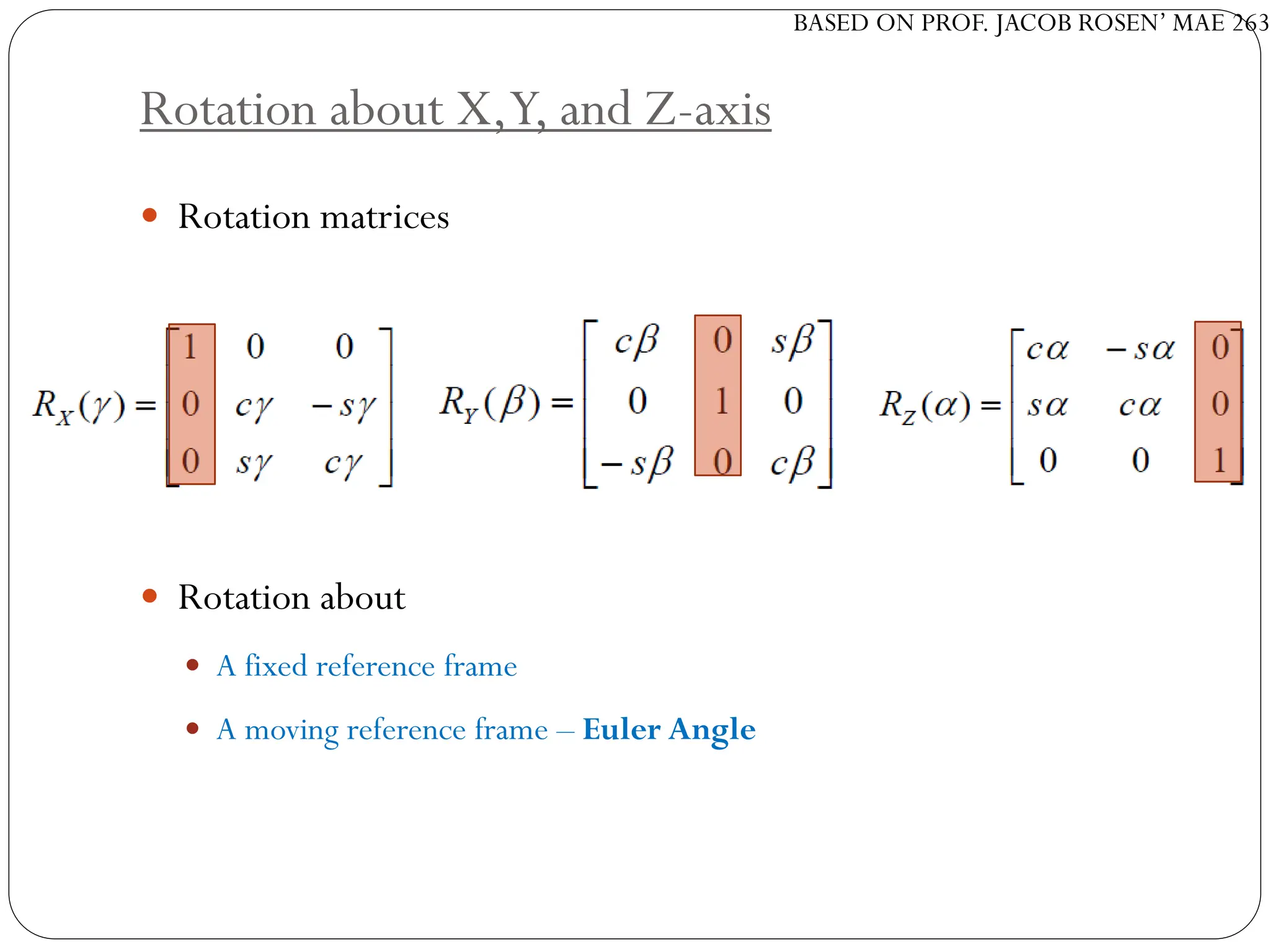
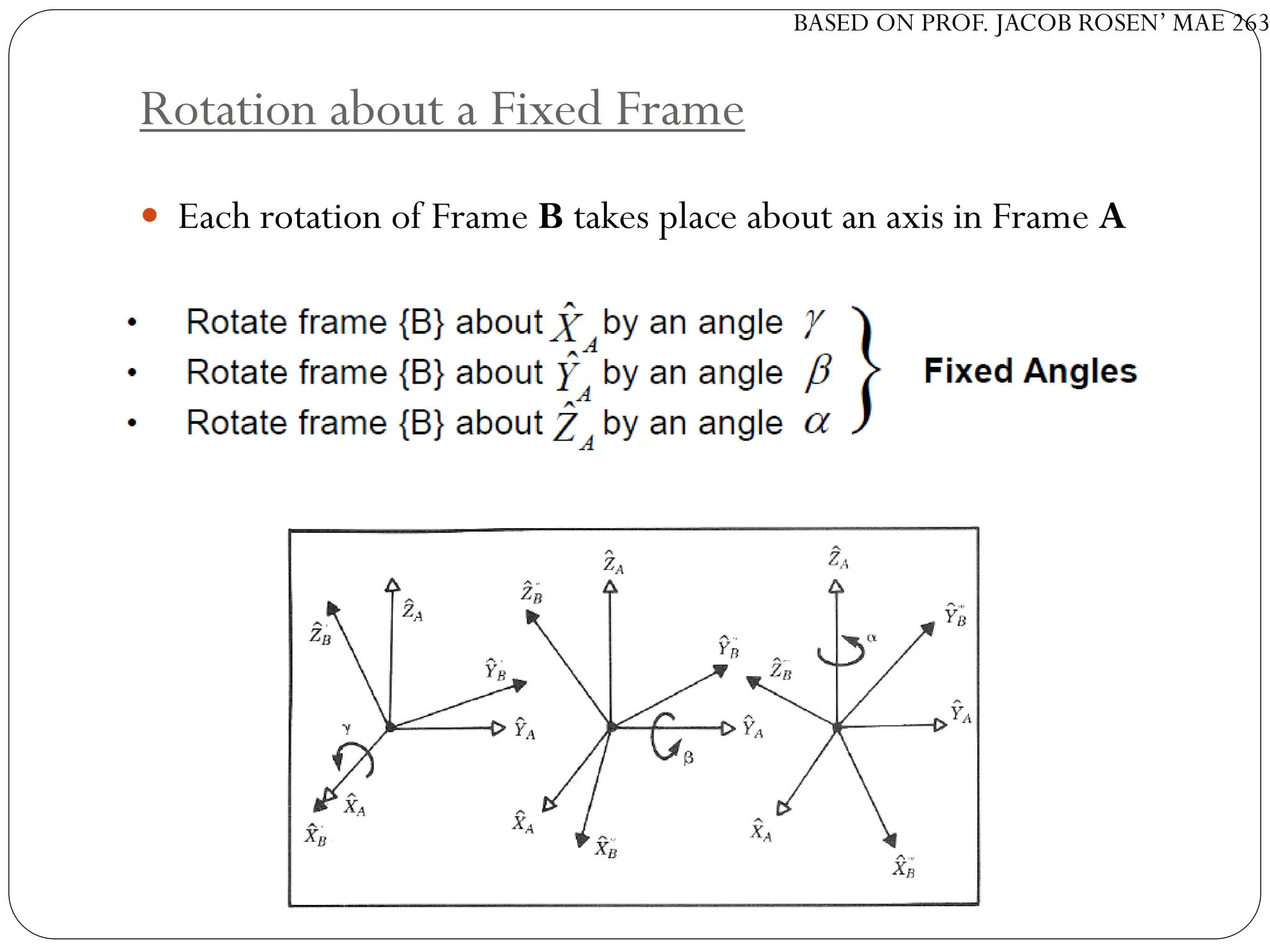
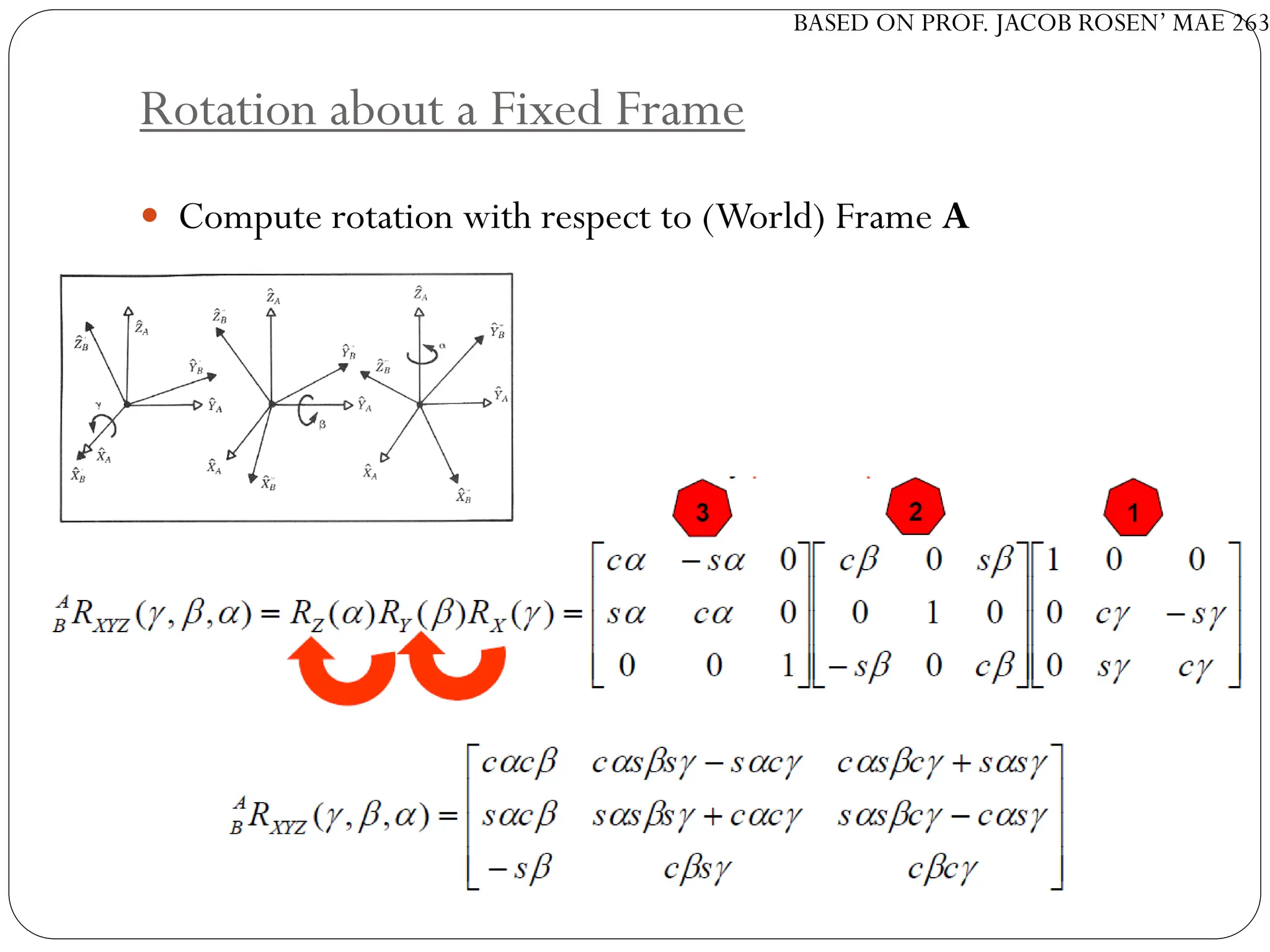
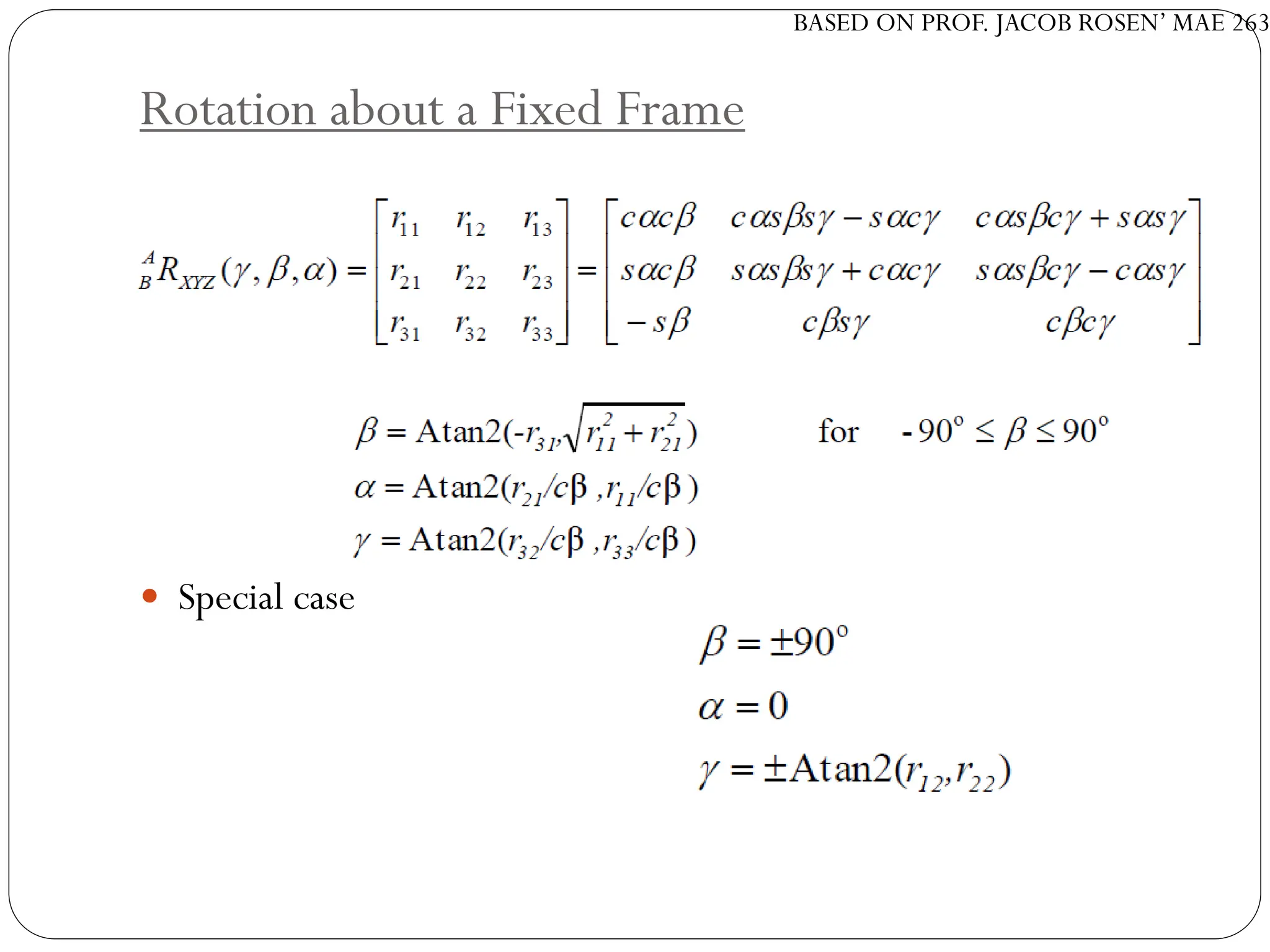
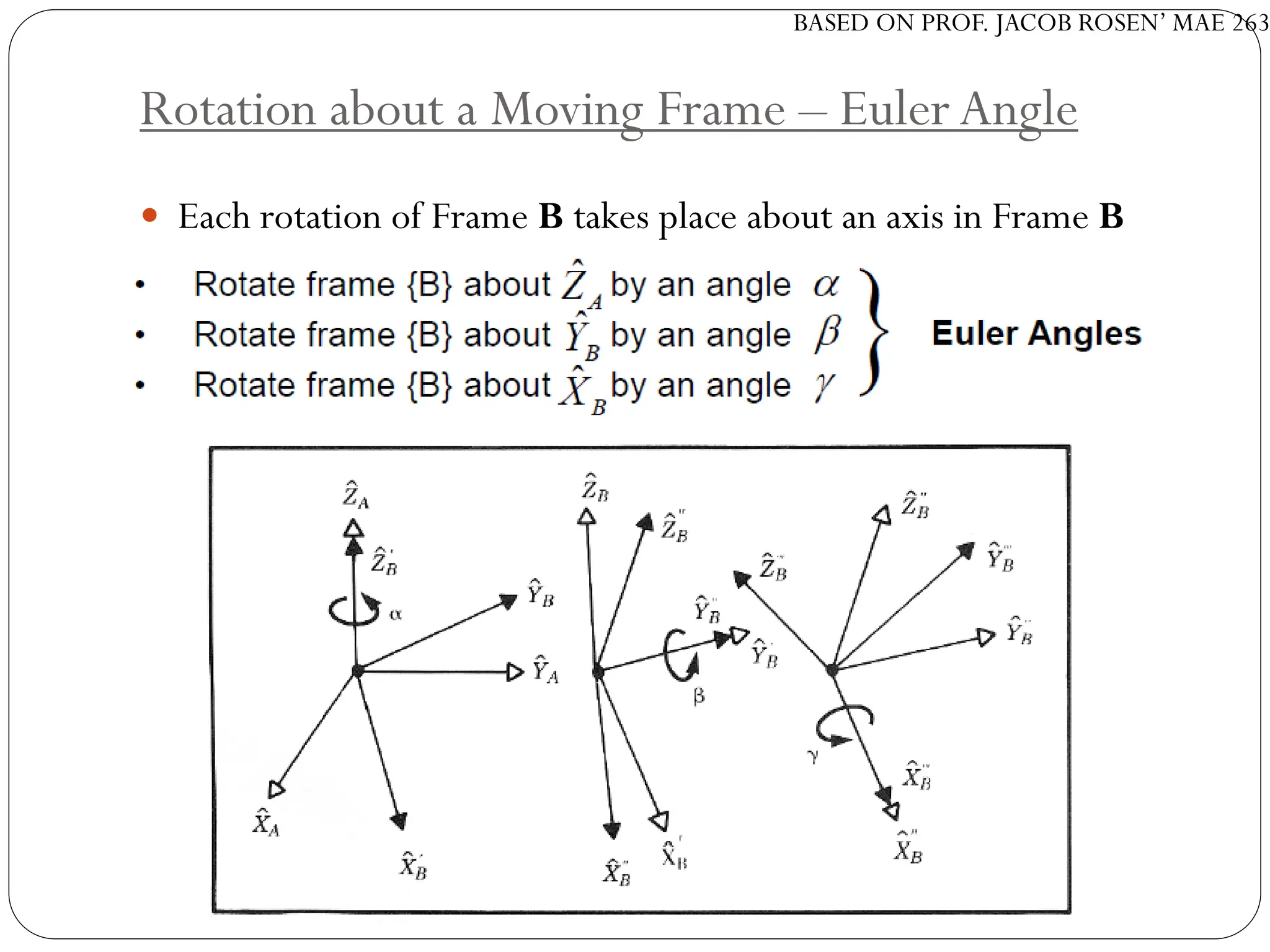
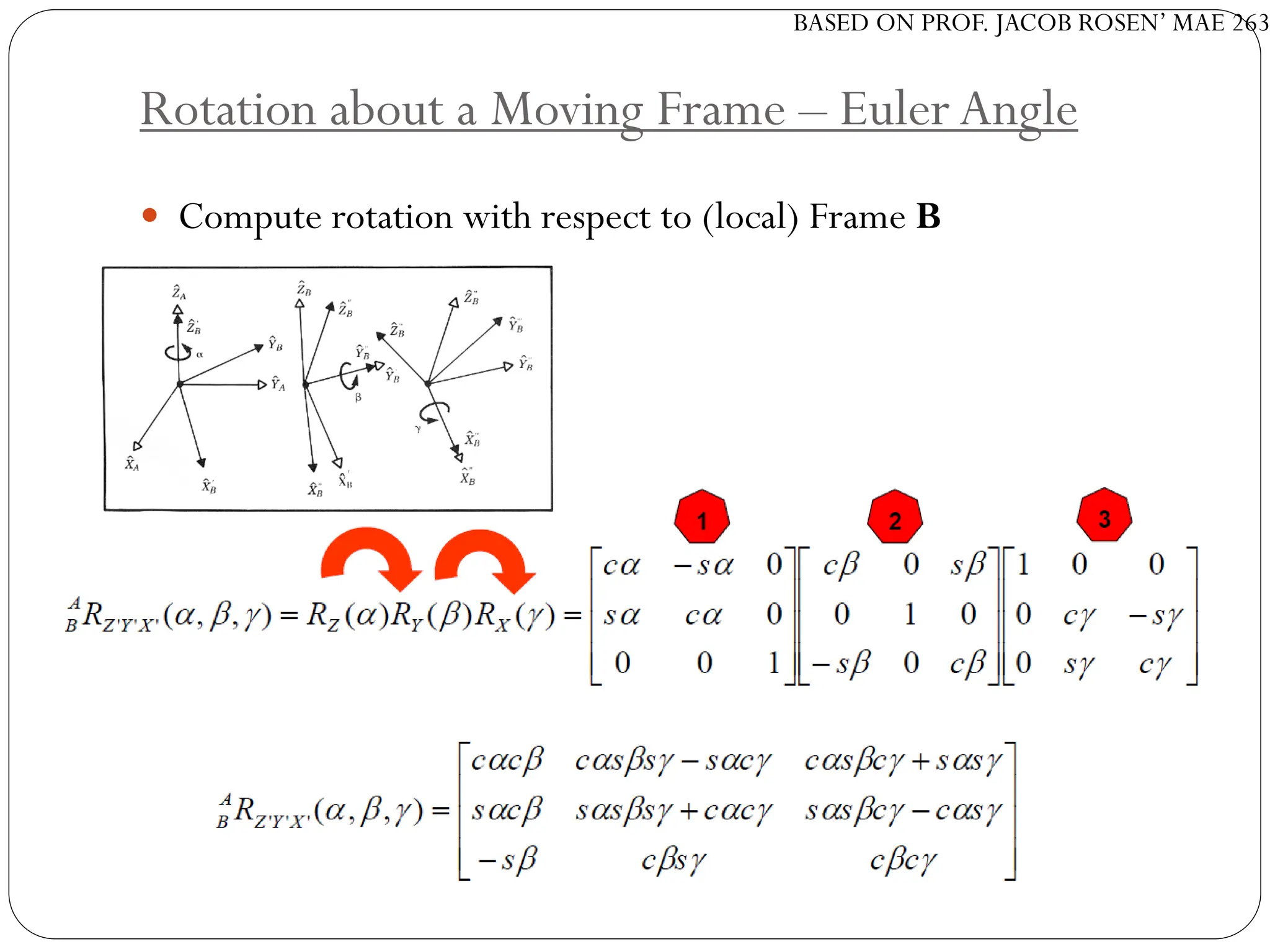
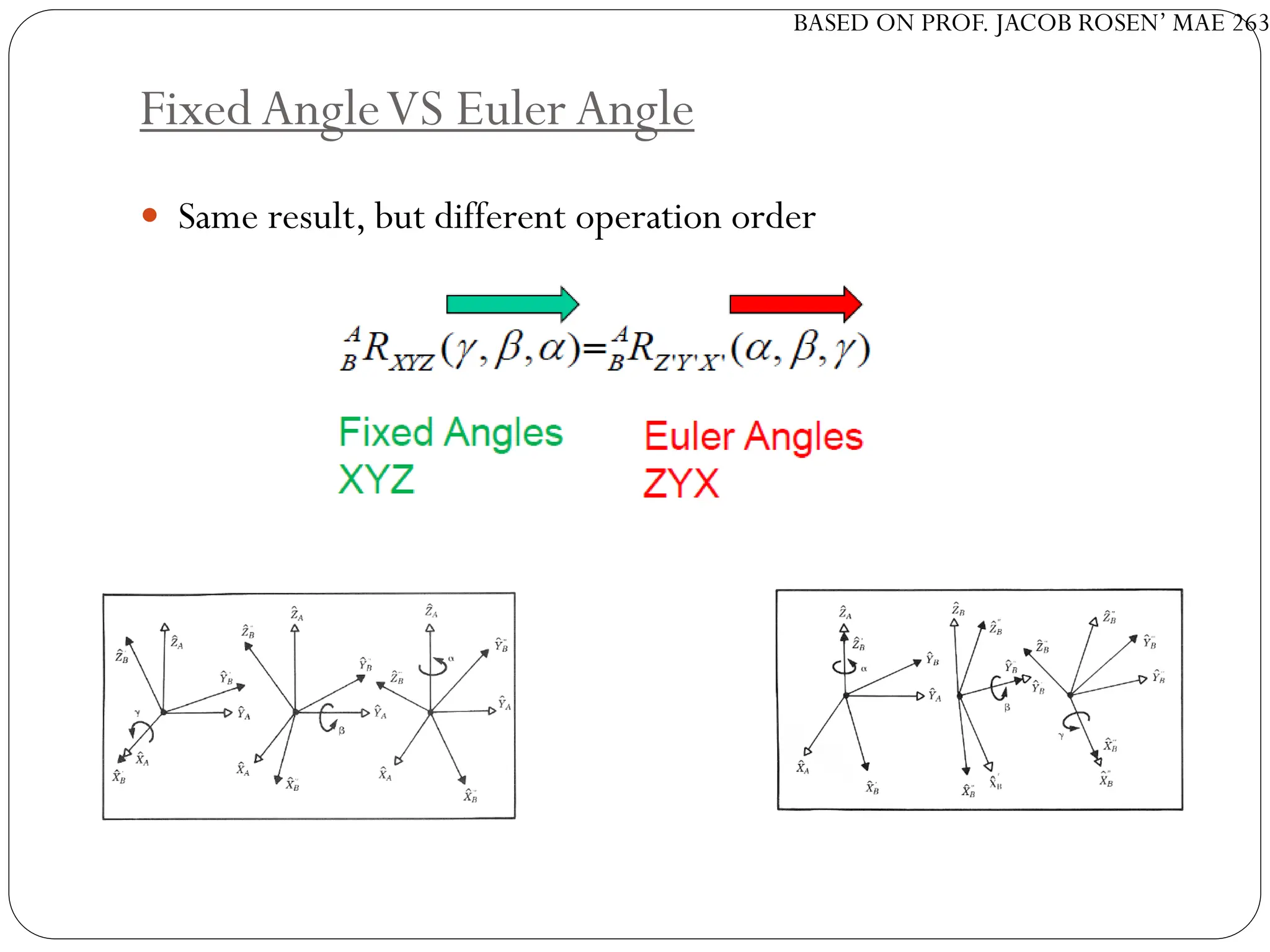
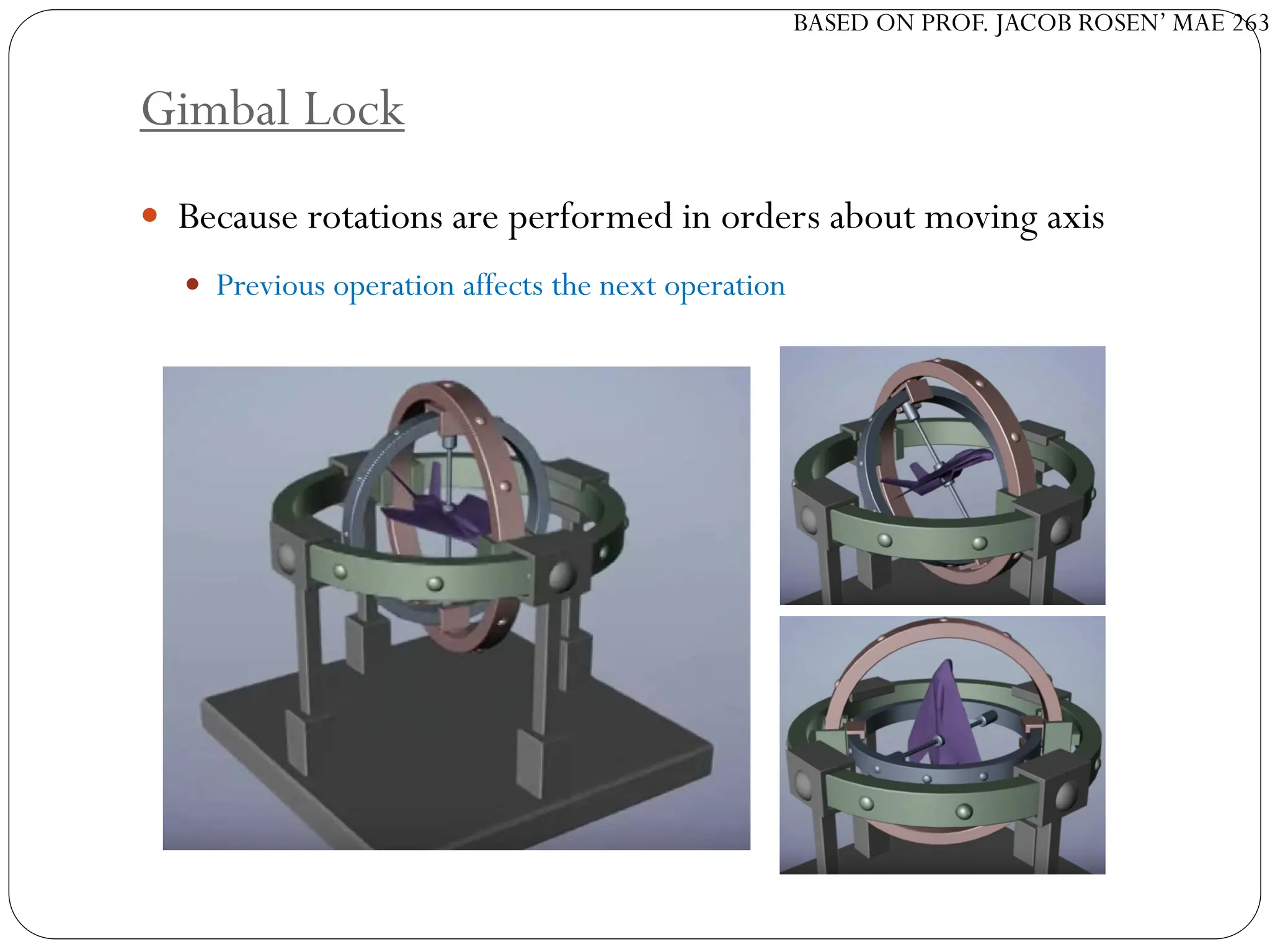
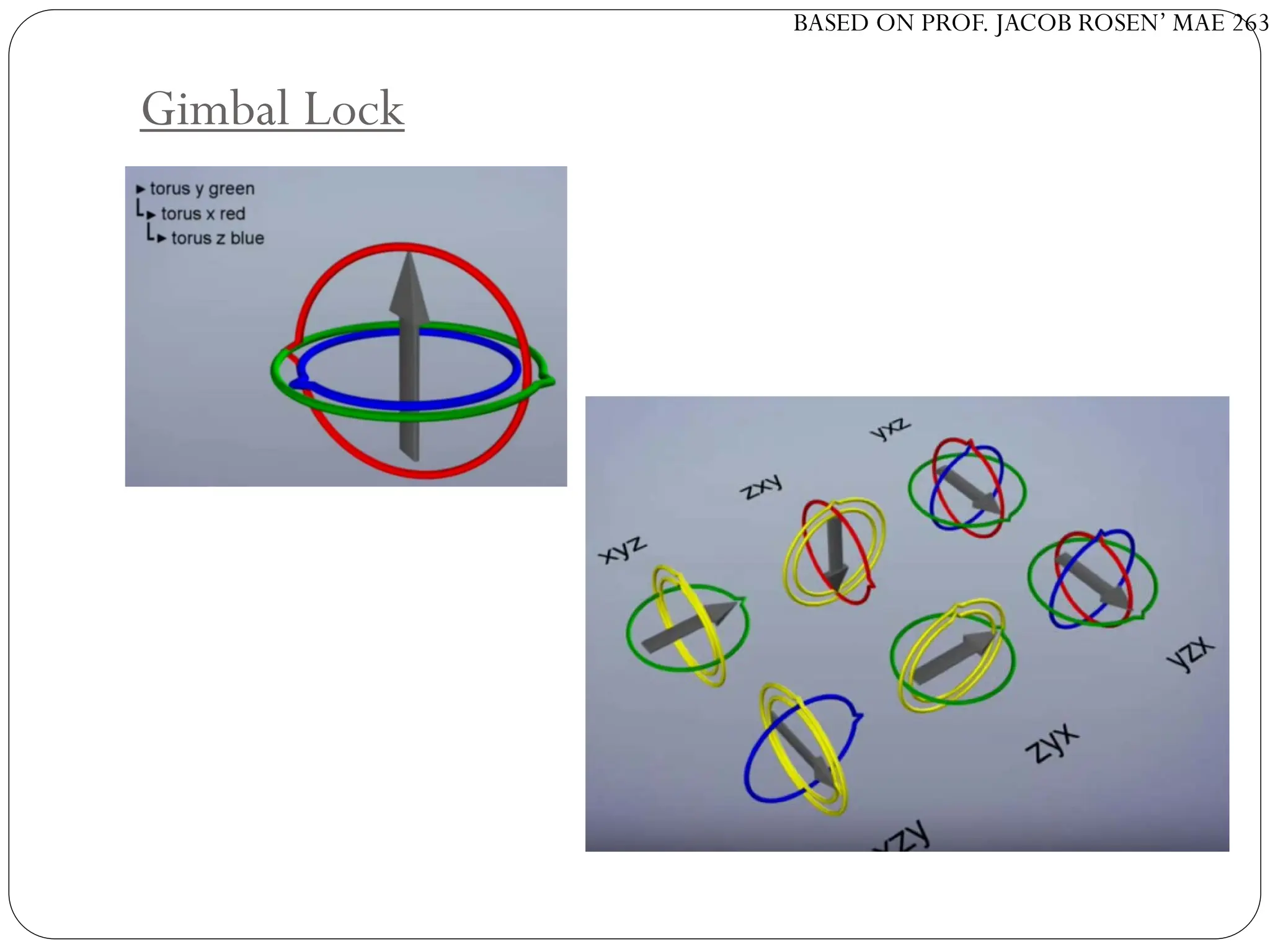
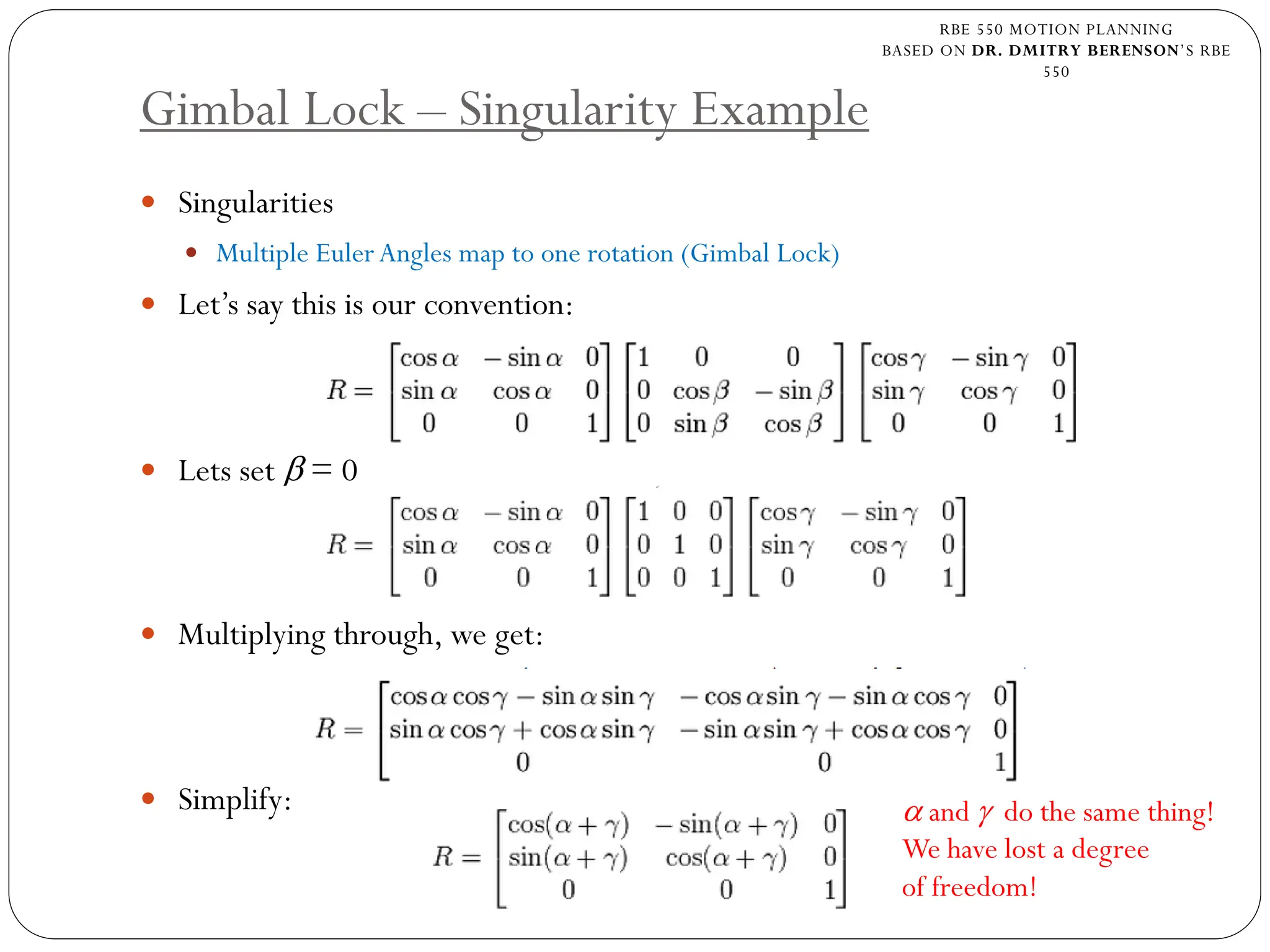
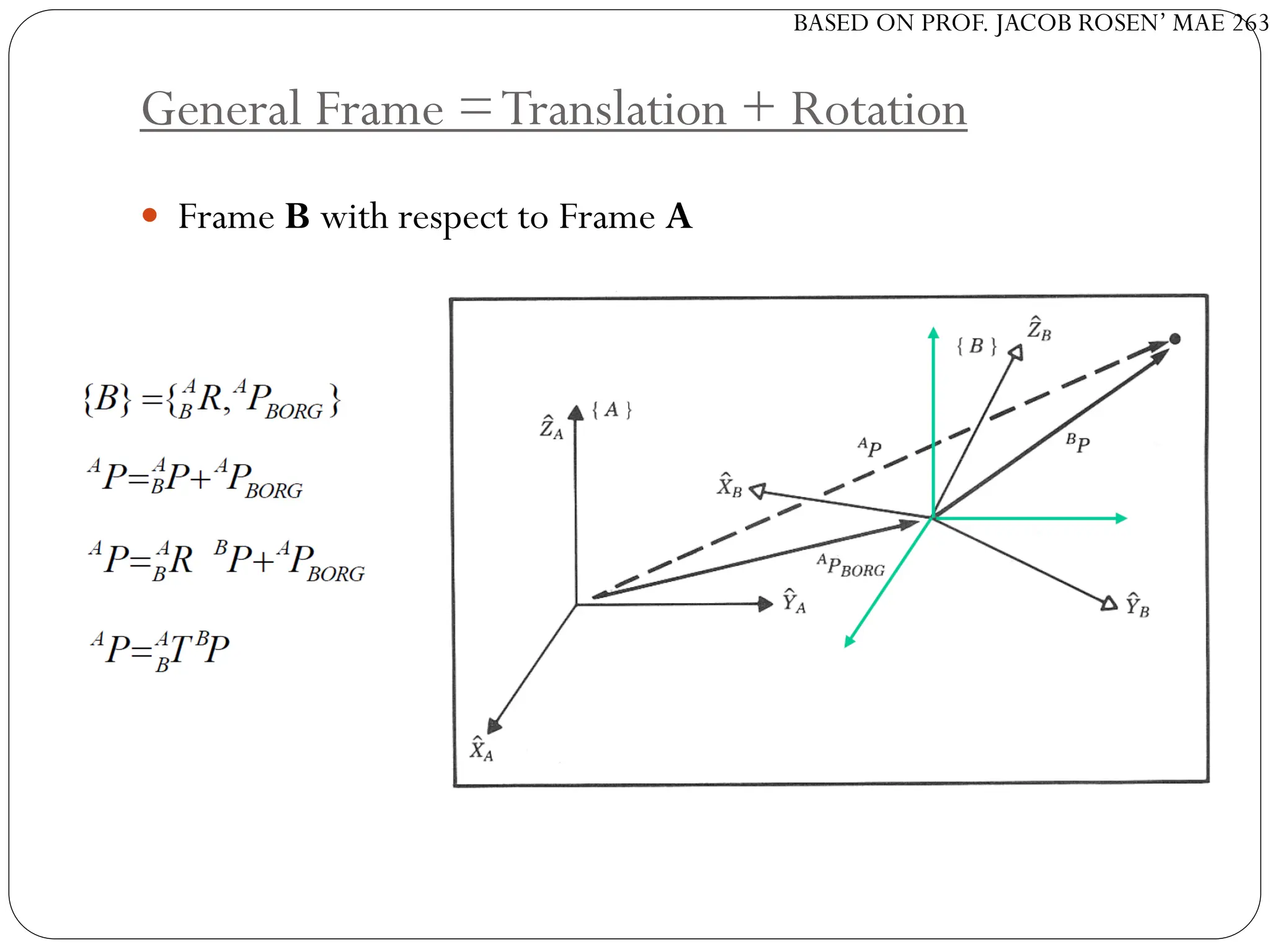
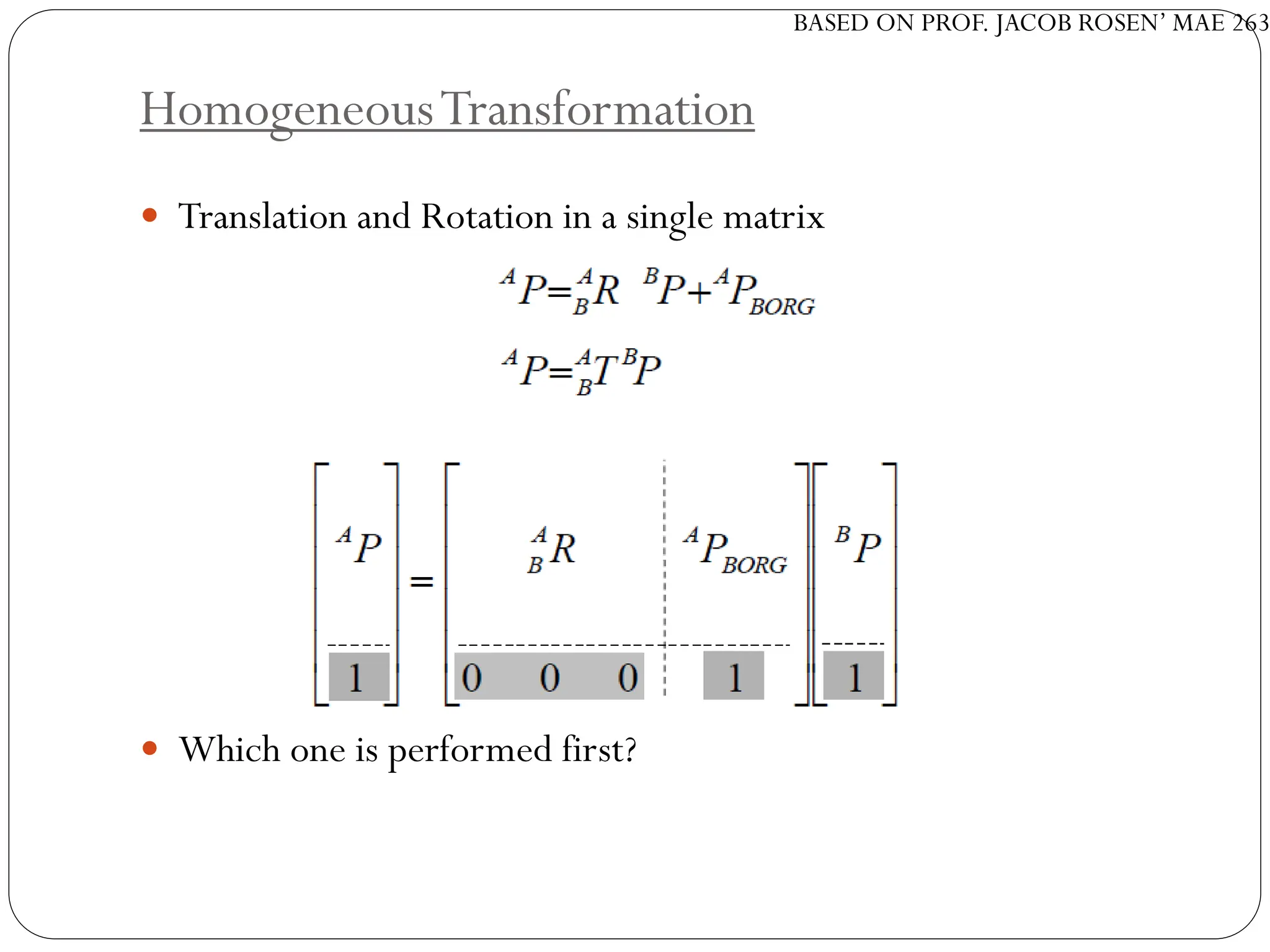
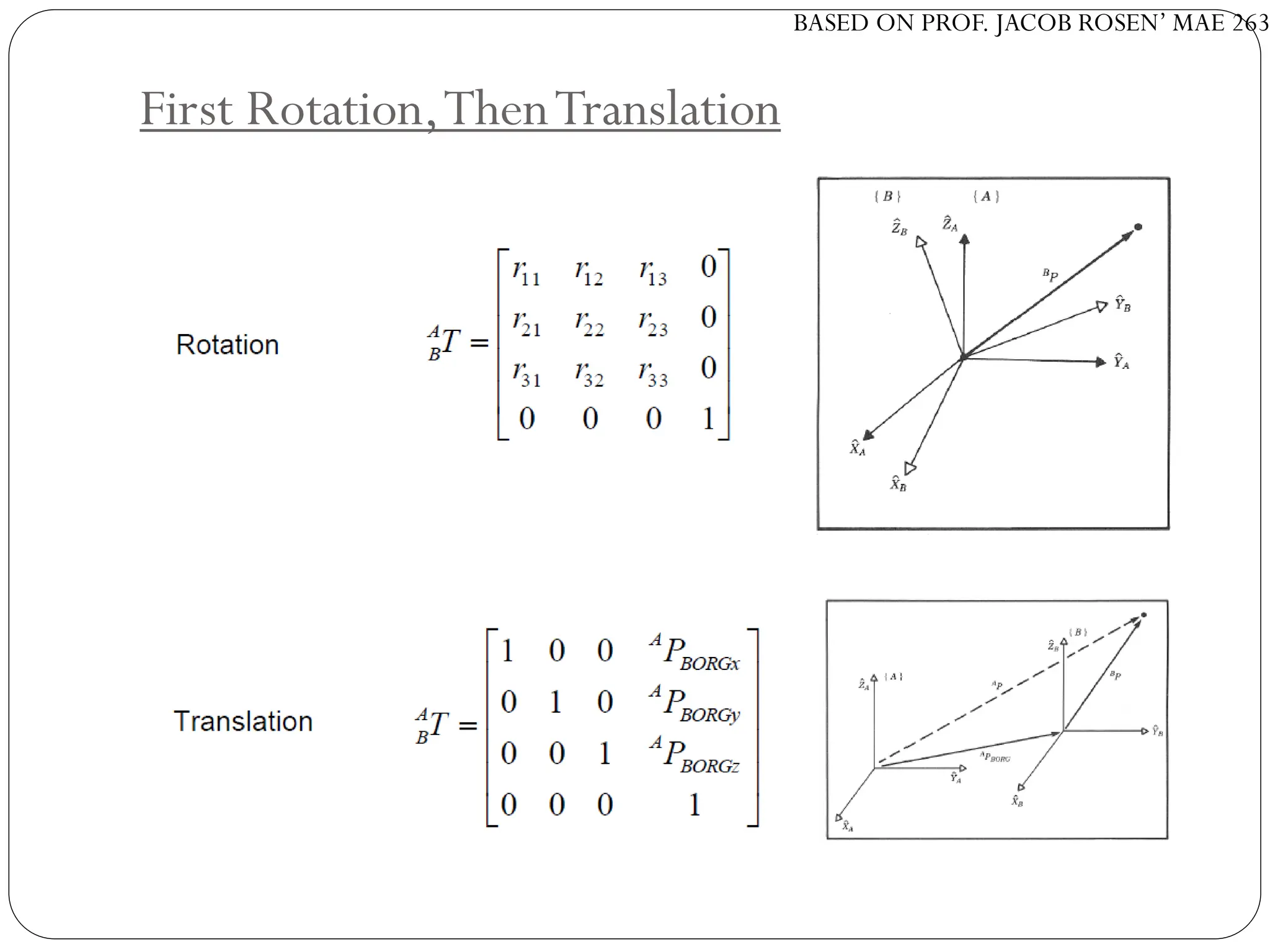
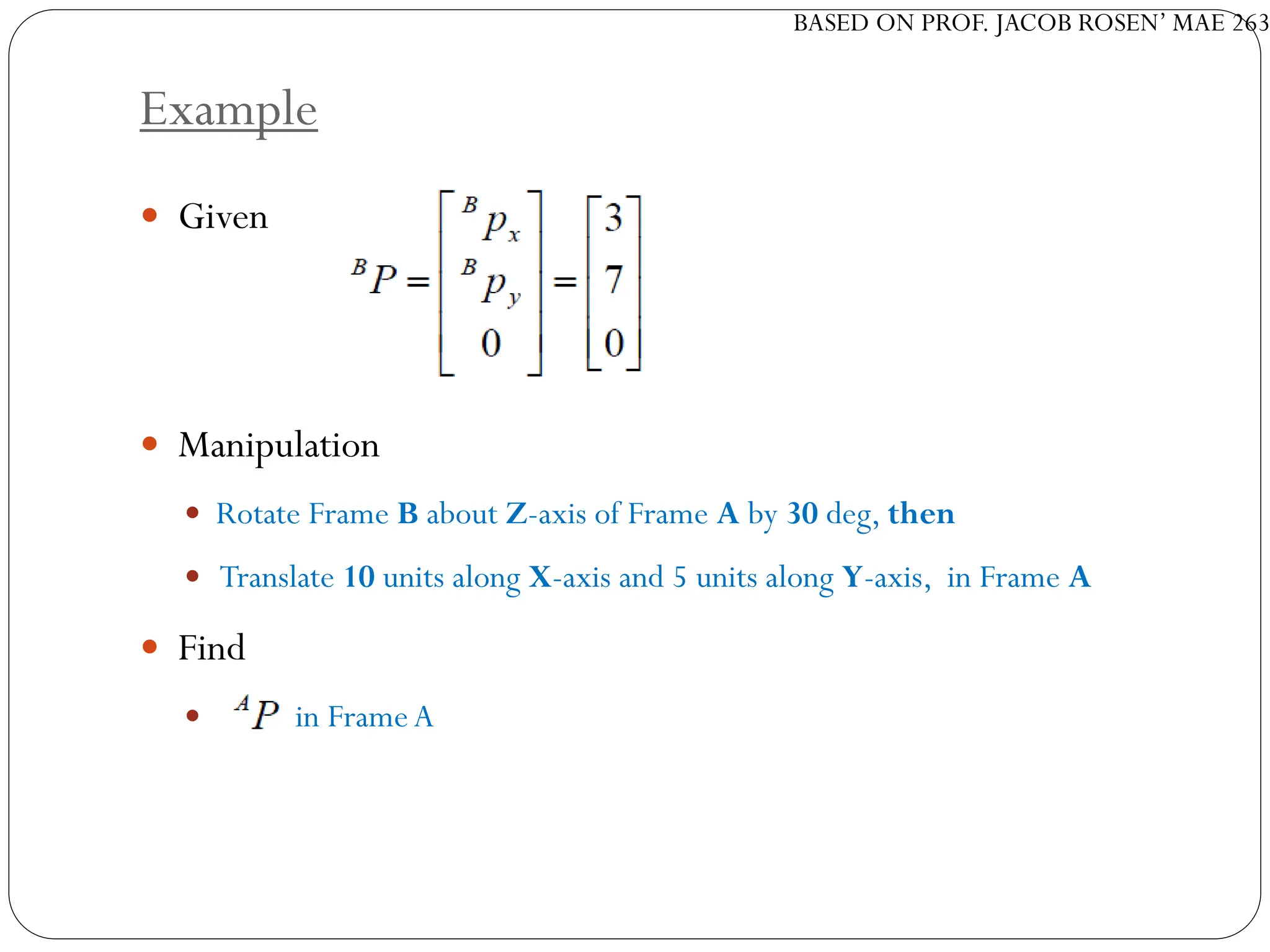
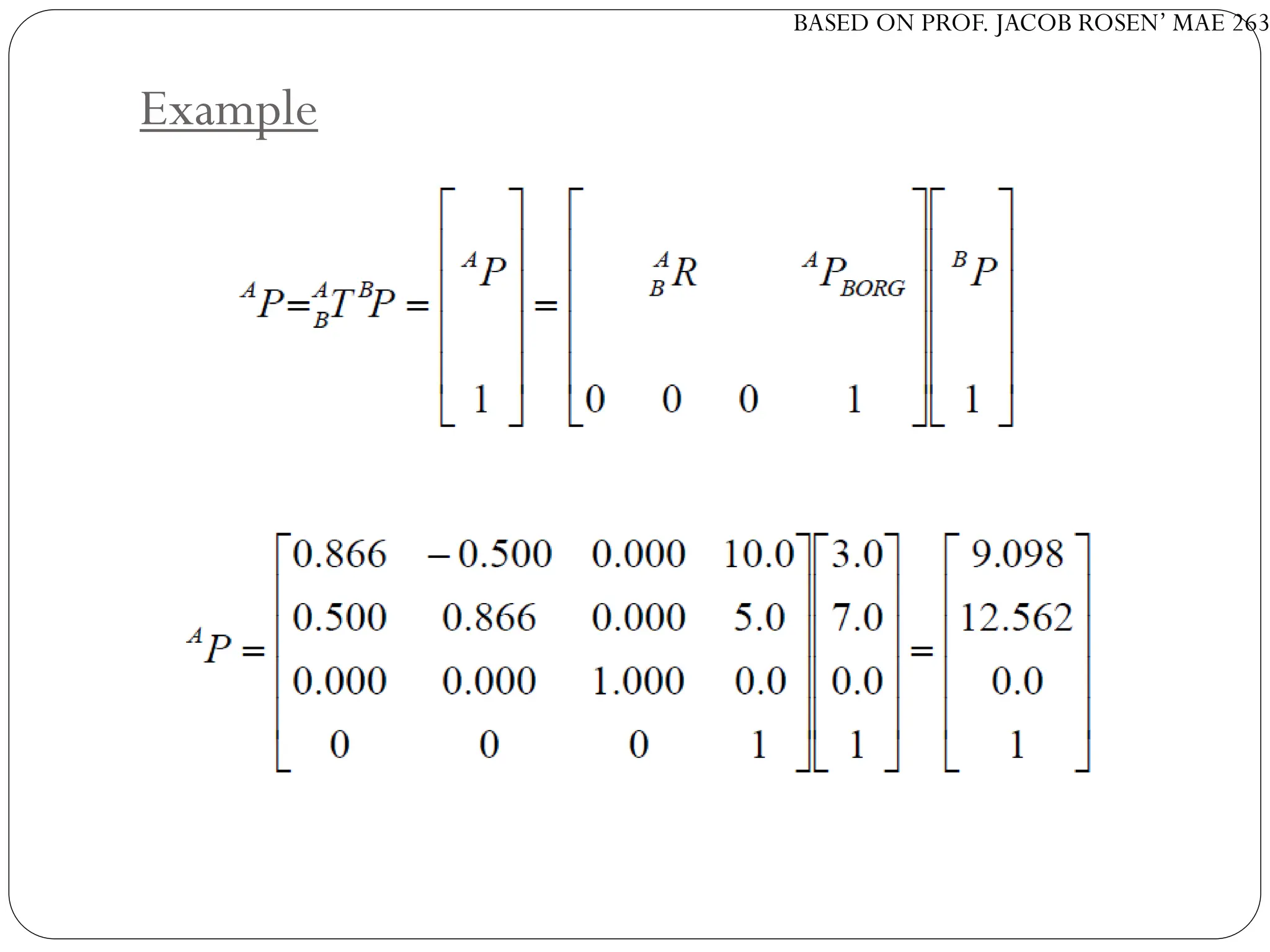
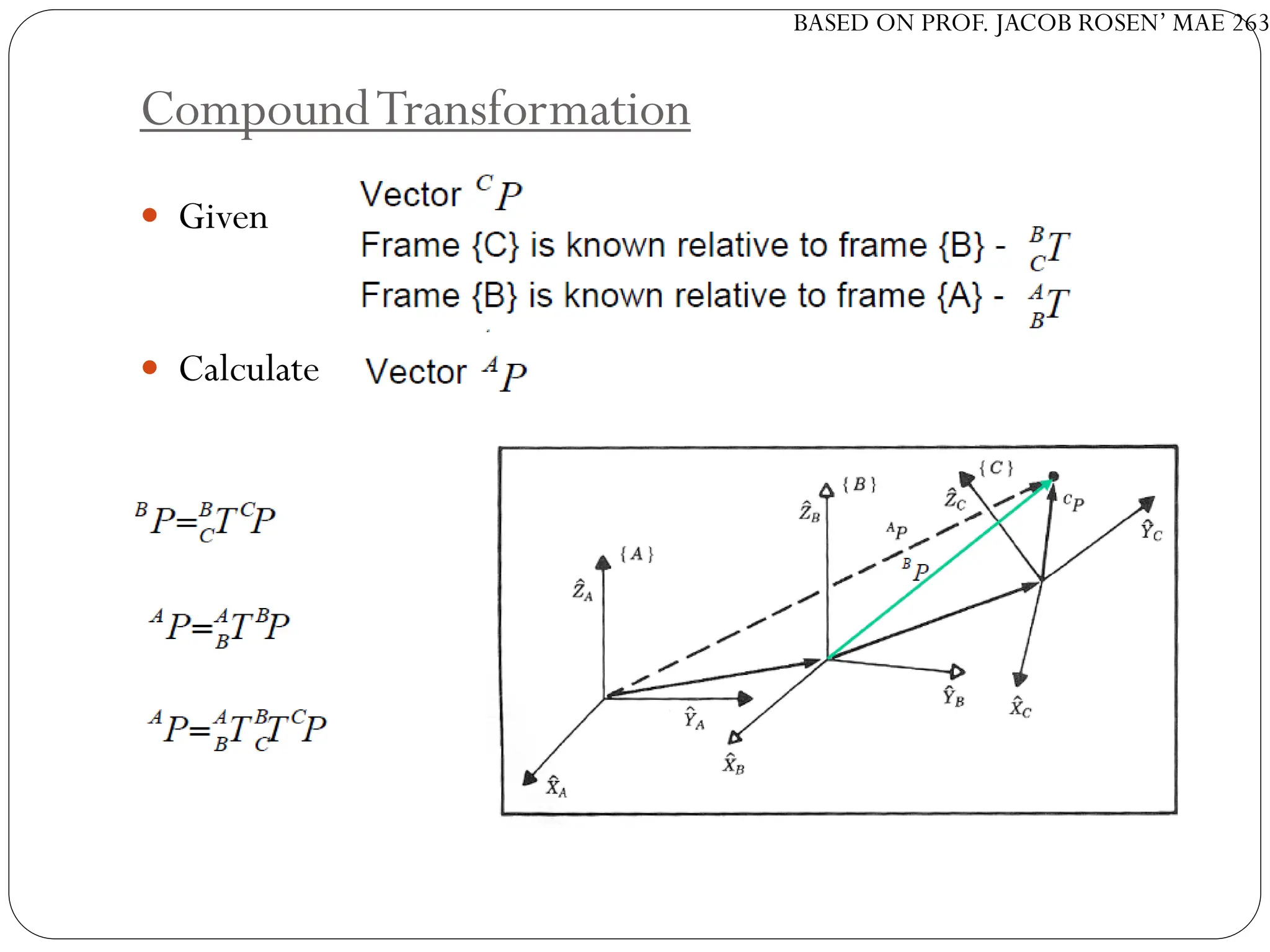
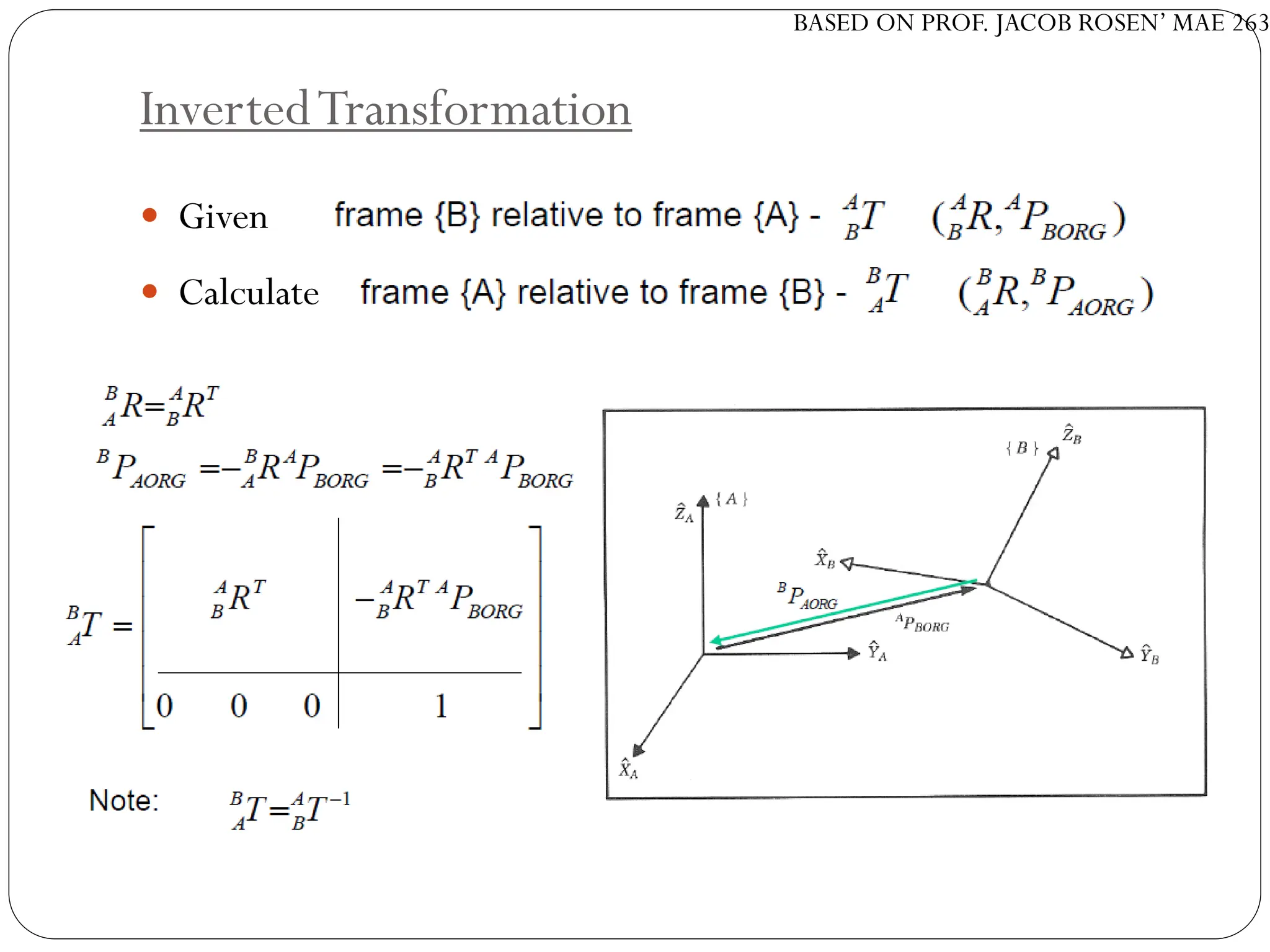
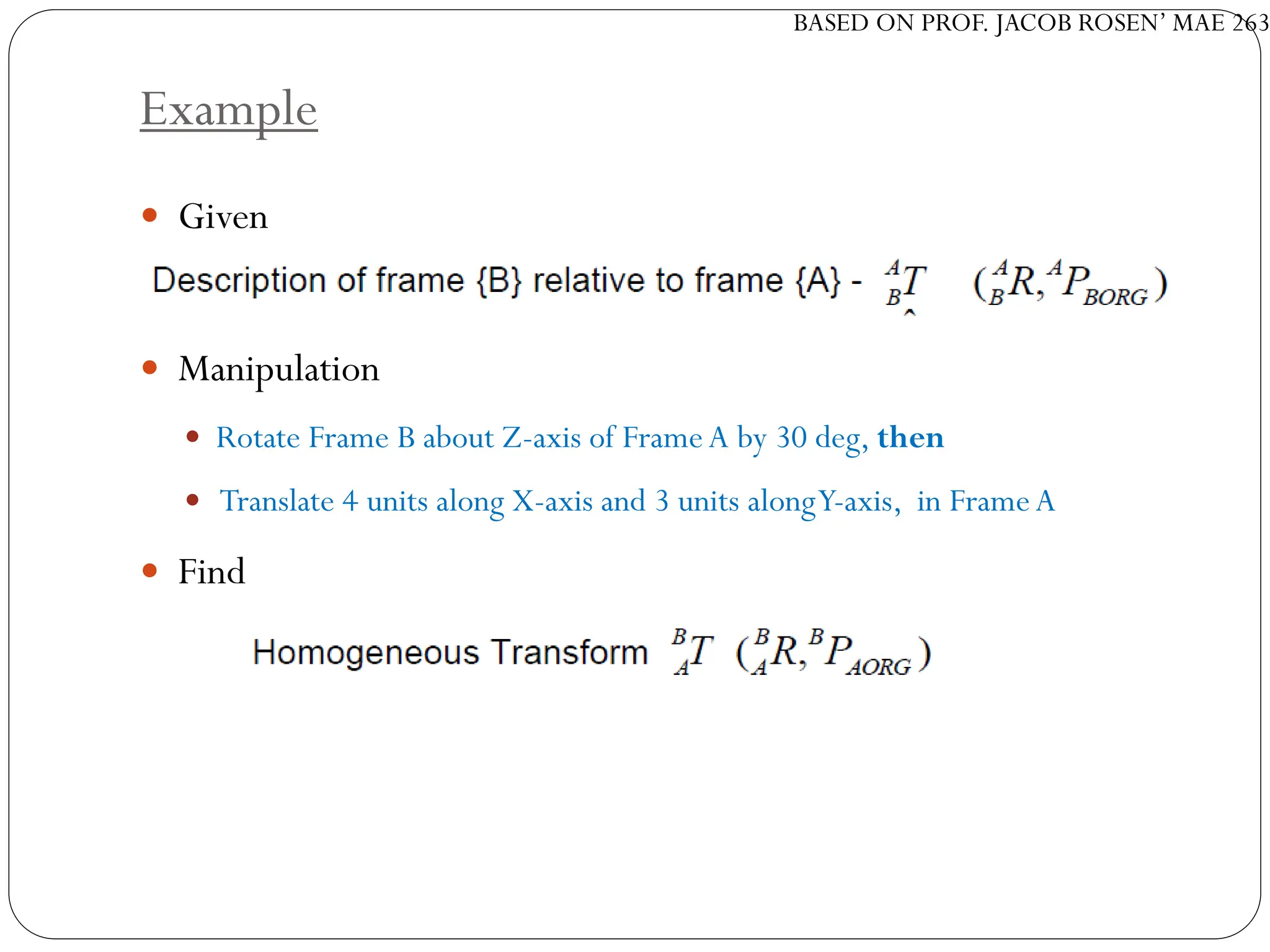
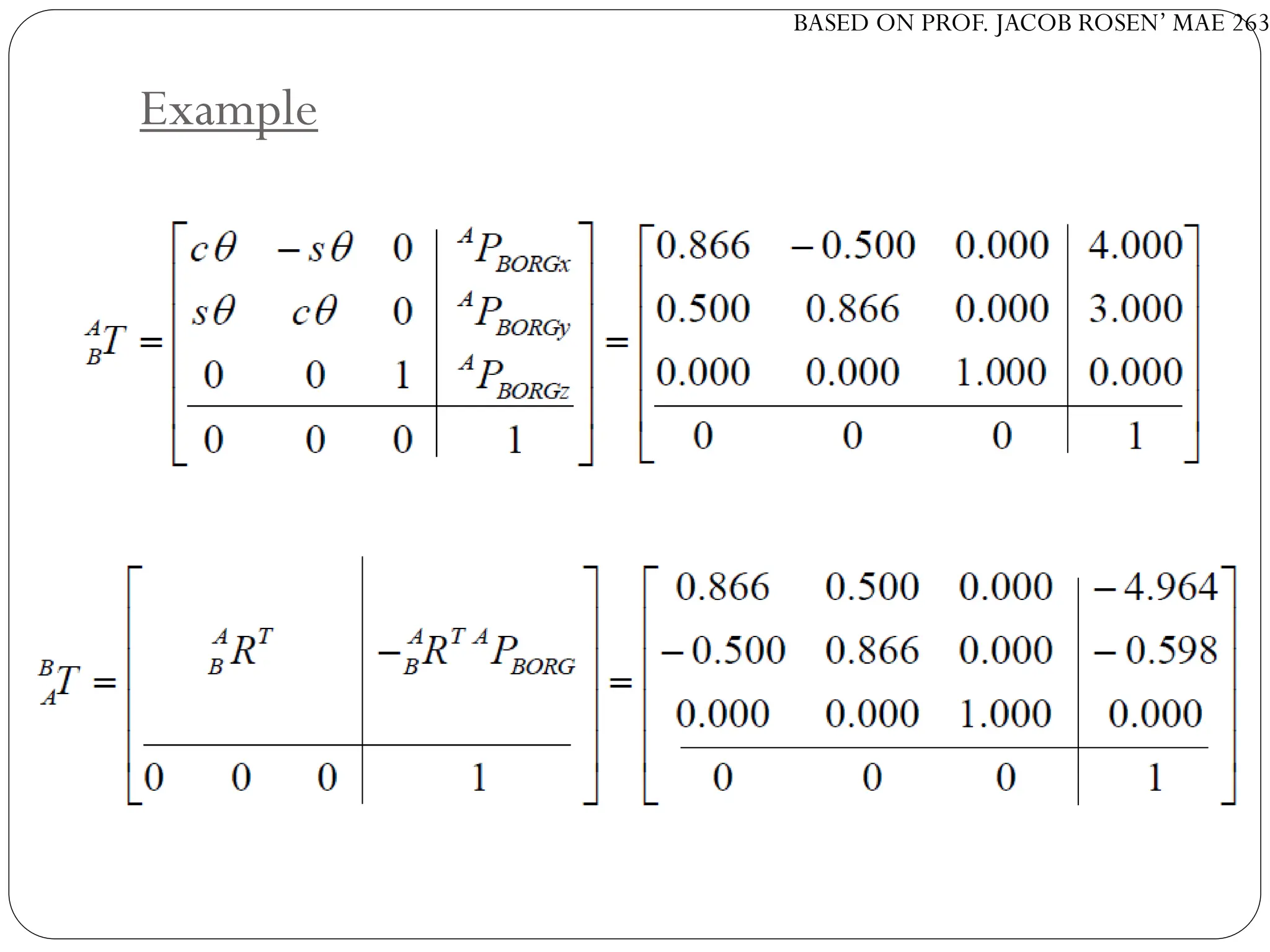
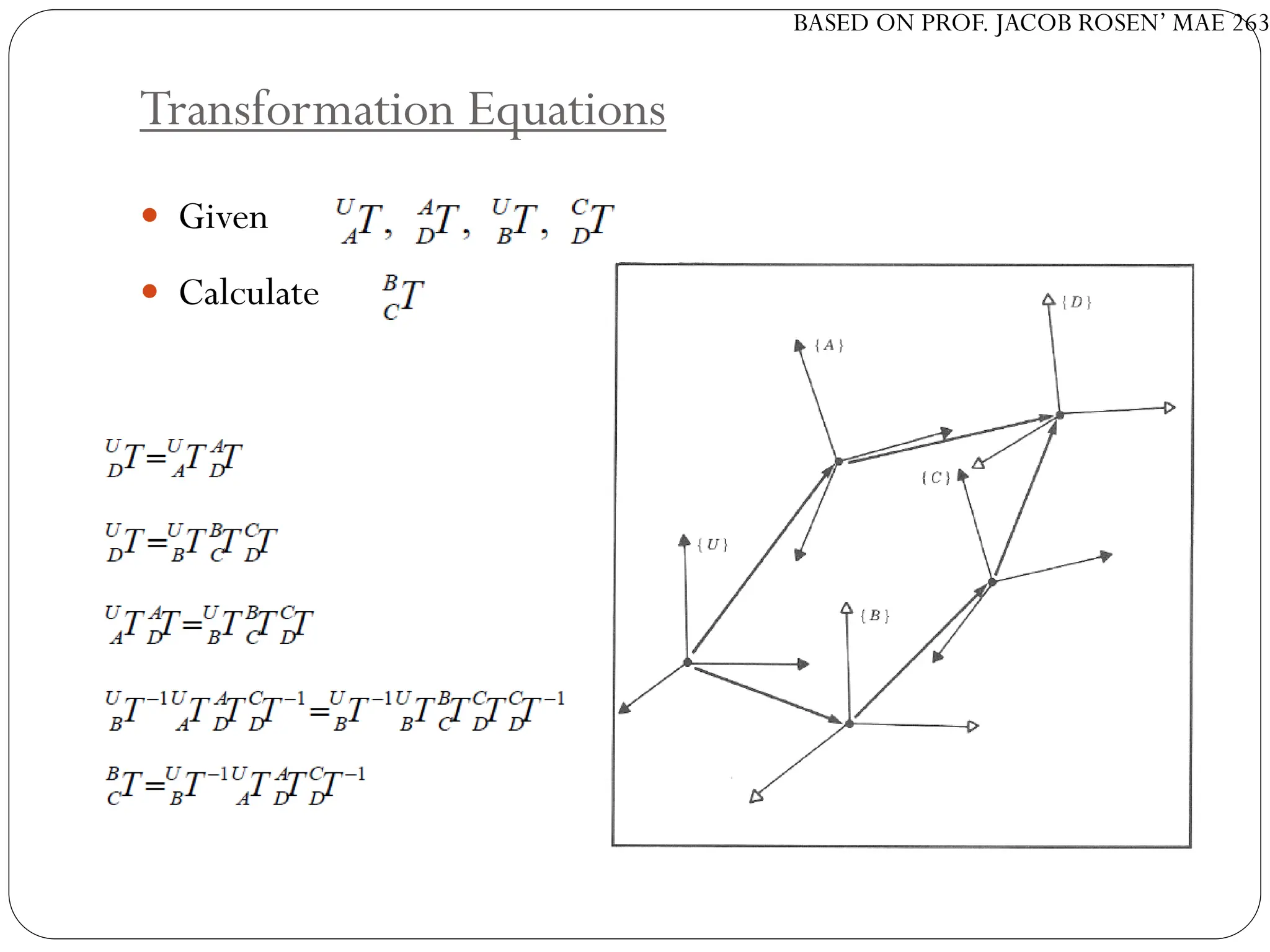
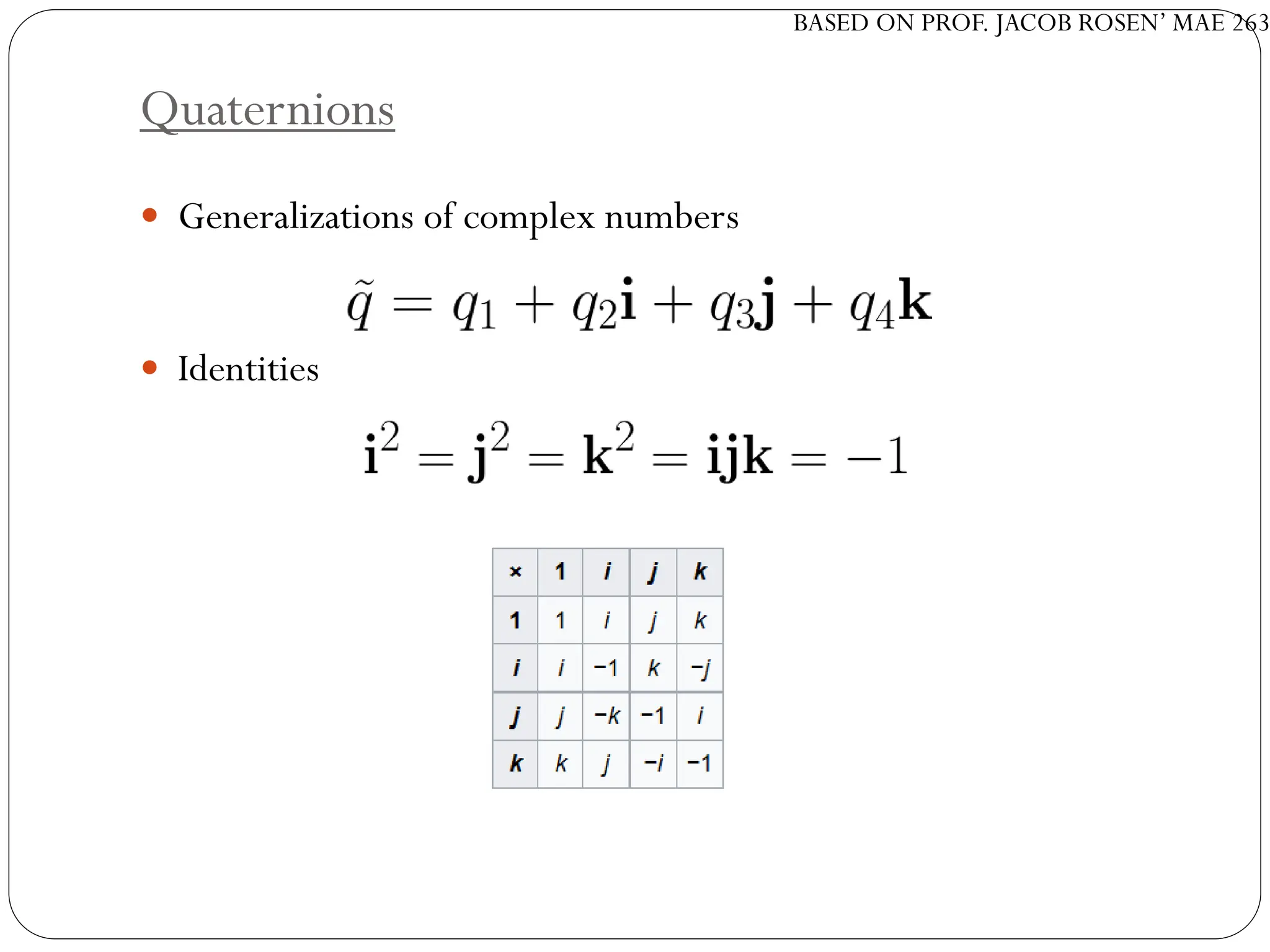
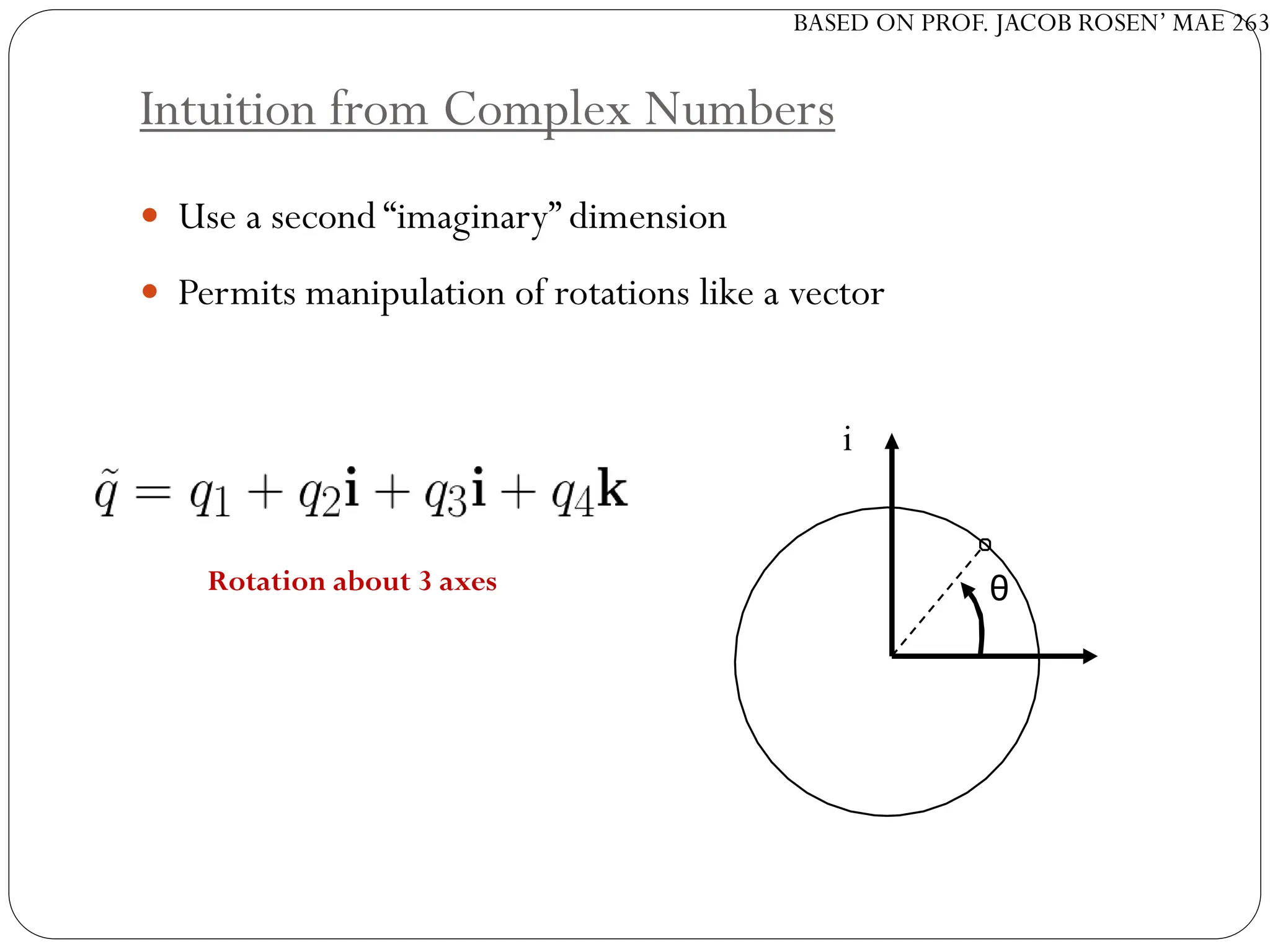
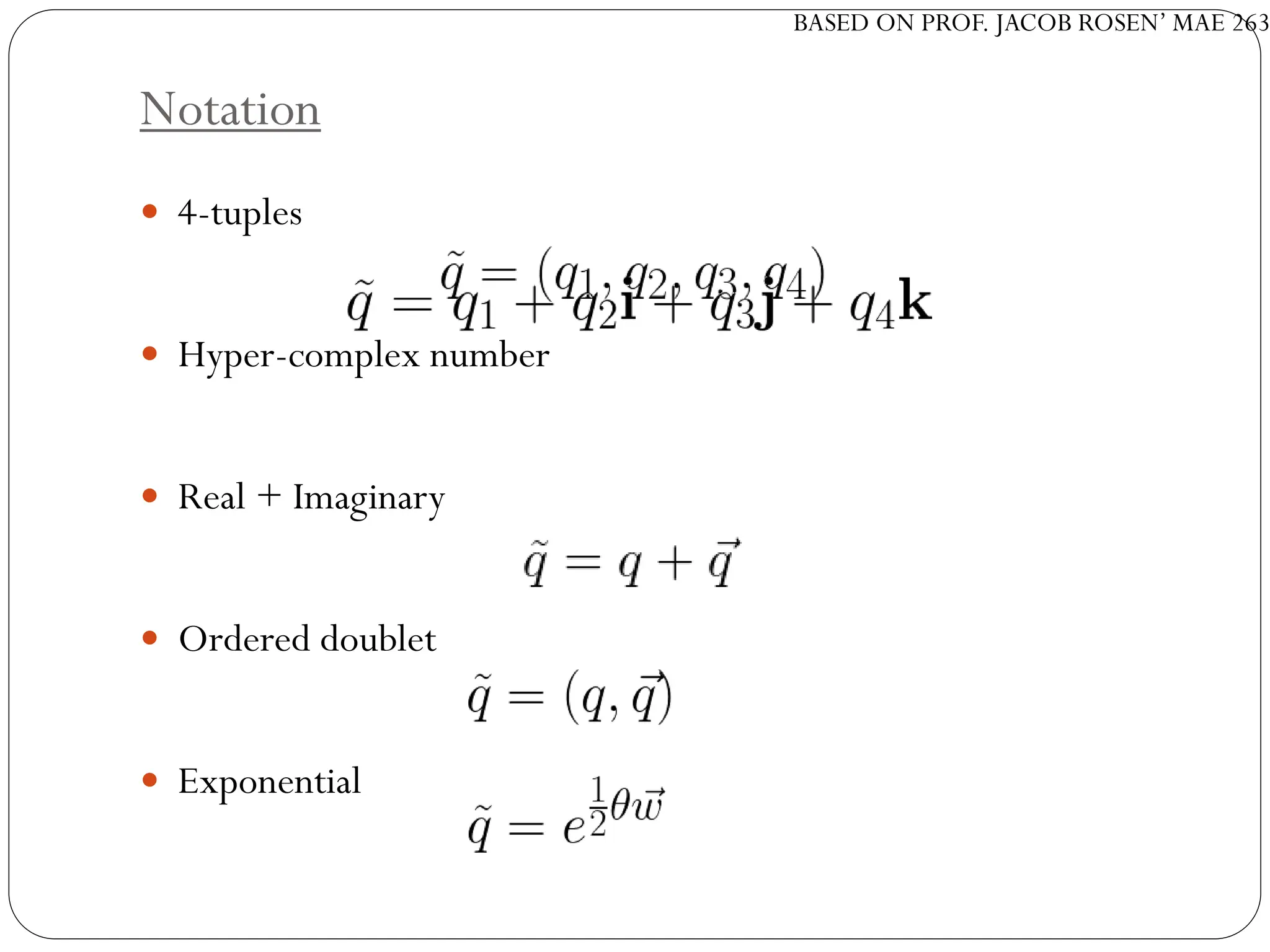
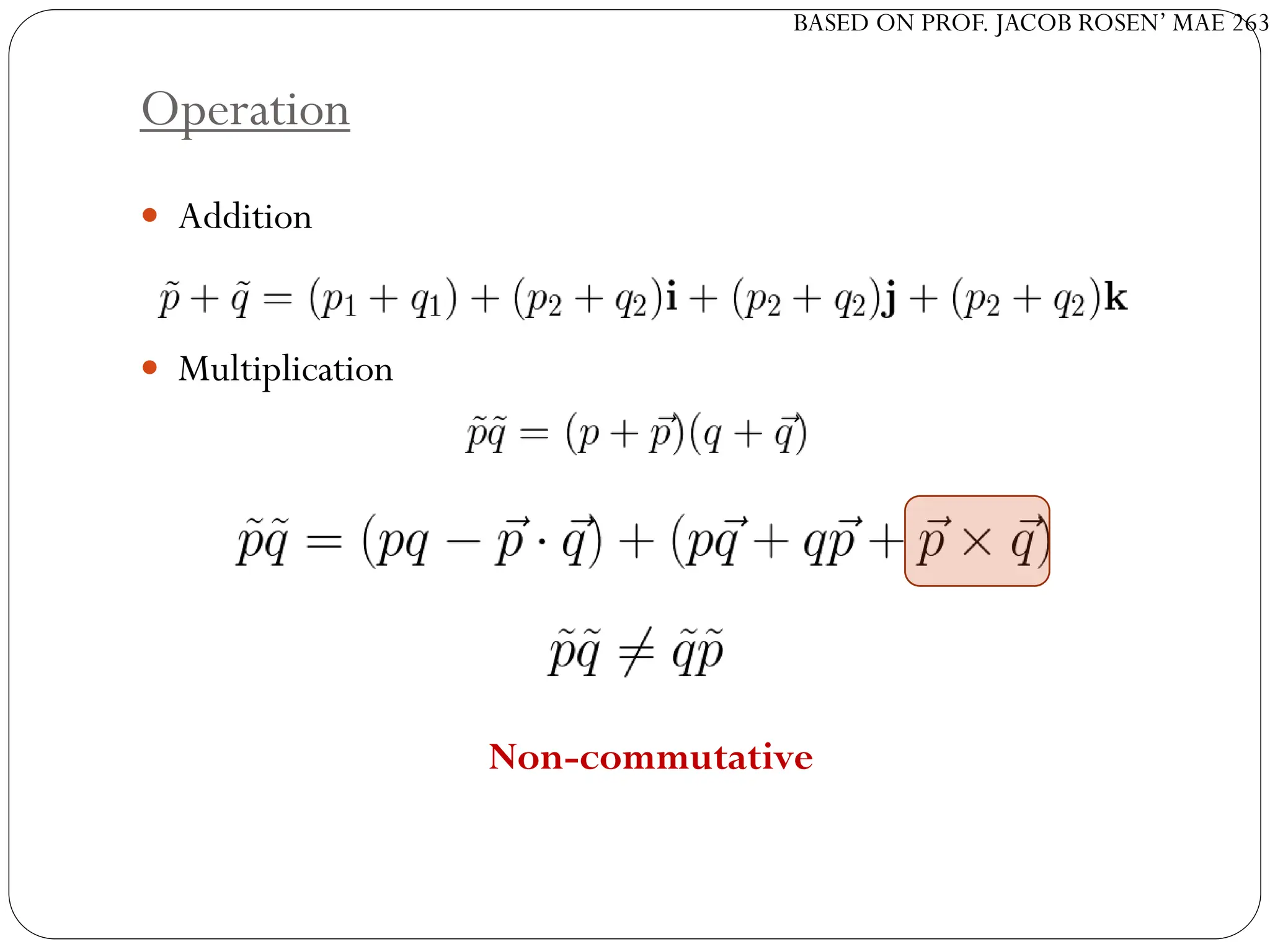
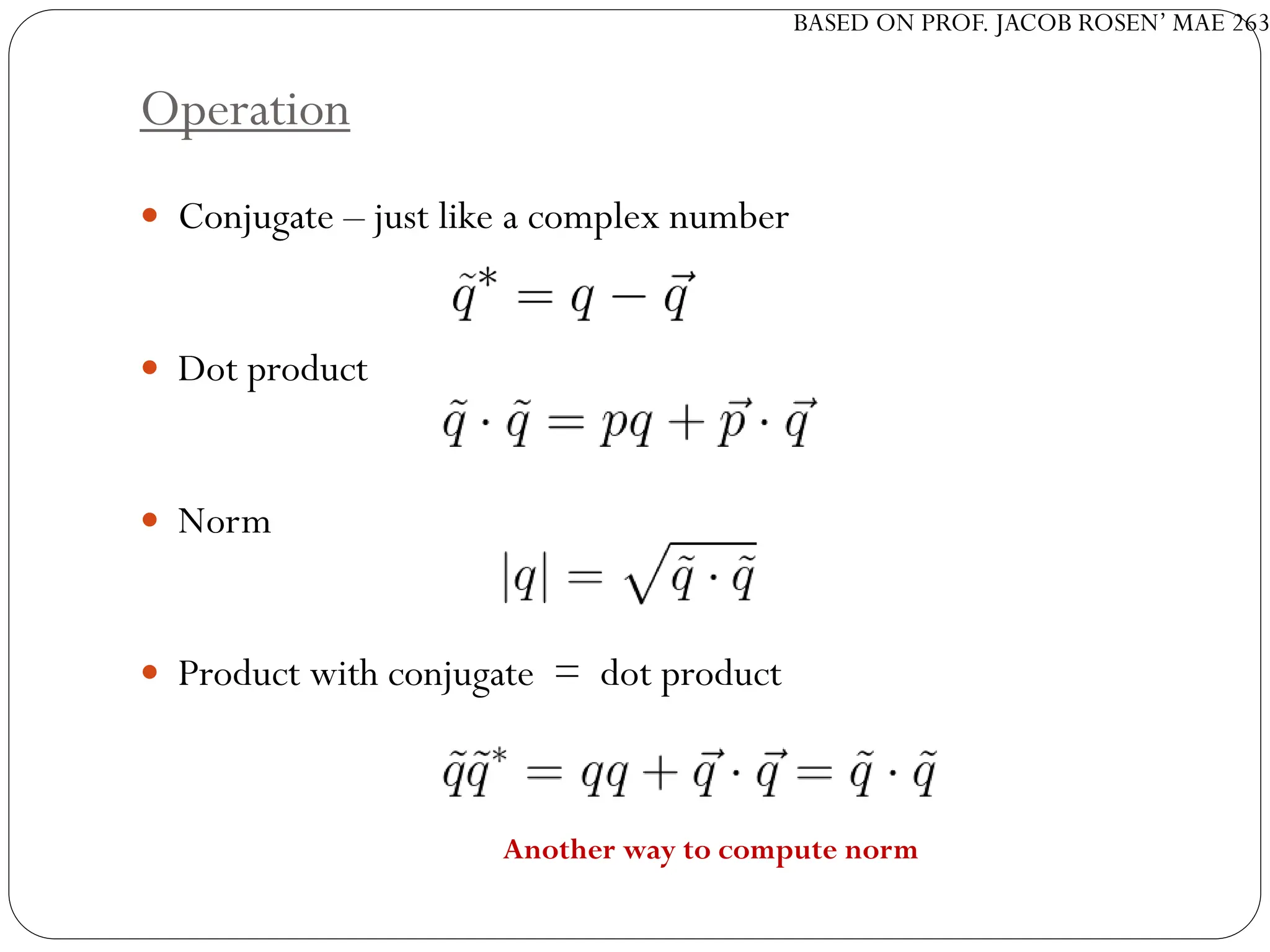
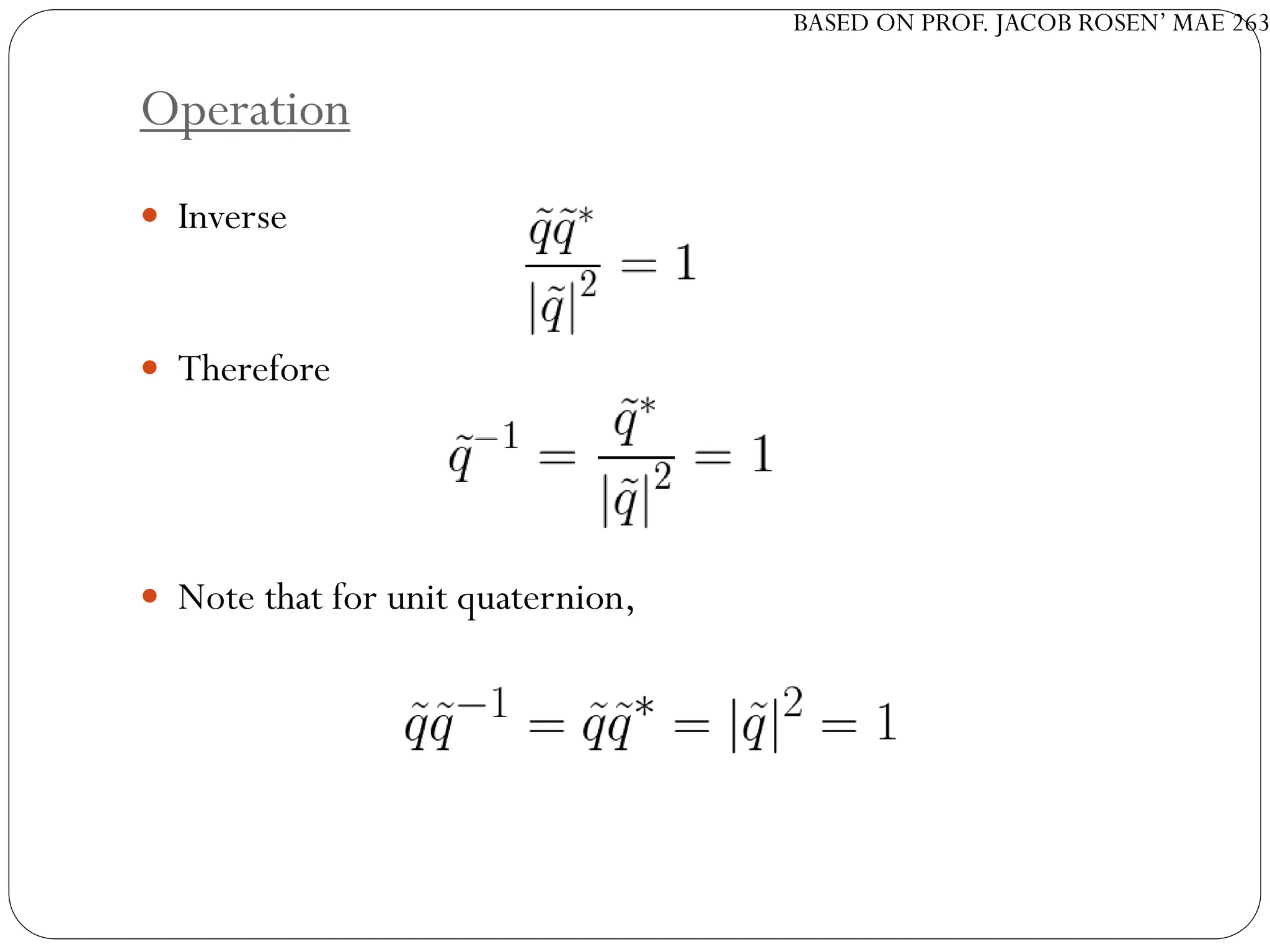
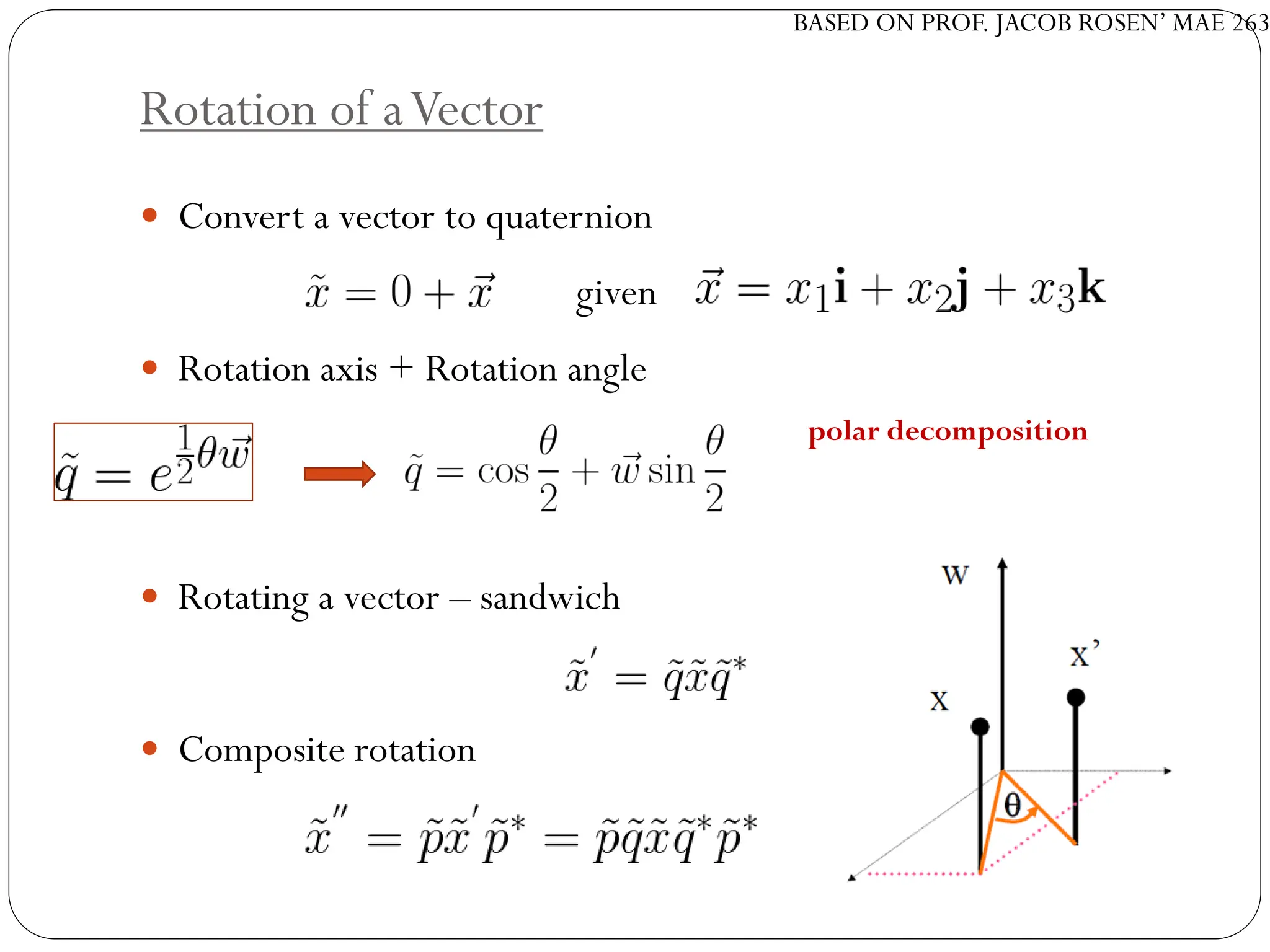
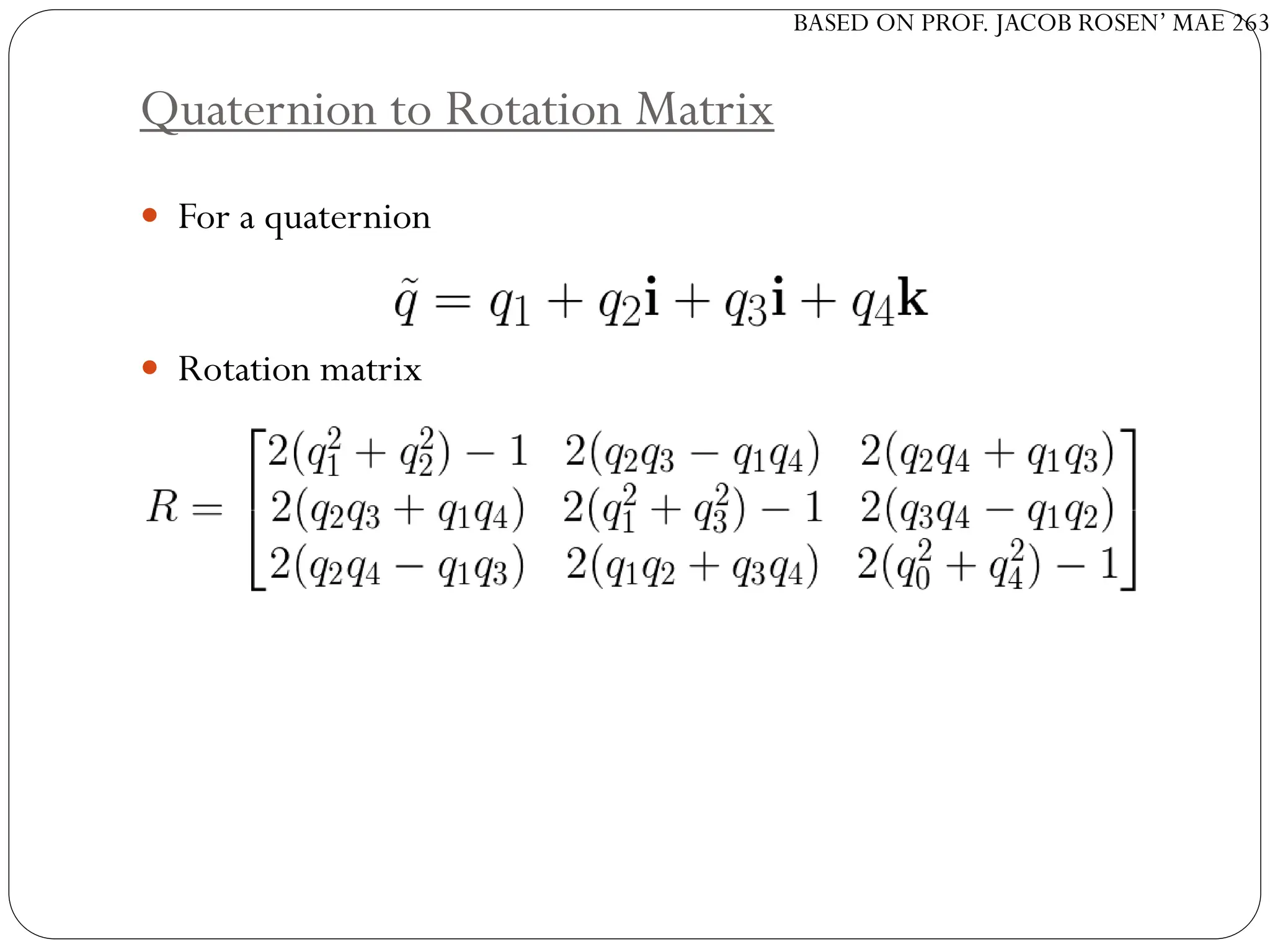
The document discusses motion planning in robotics, focusing on rigid-body transformations and their various representations, including Euler angles, homogeneous transformations, and quaternions. It emphasizes the importance of understanding rotations and translations in both fixed and moving frames, and highlights the limitations such as gimbal lock. Different transformation techniques are compared for their efficiency and applicability in motion planning contexts.