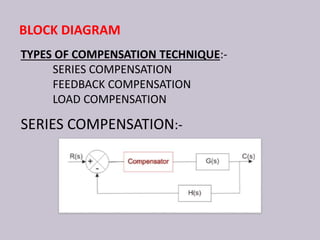
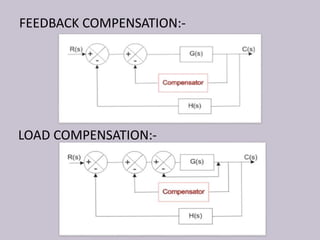
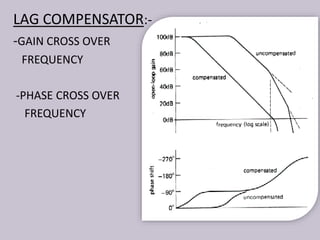
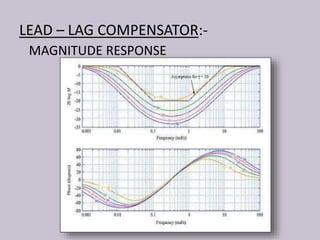
This document describes the development and design of a compensator system. It includes an abstract, introduction, literature review, working algorithm, output analysis, and applications. The project involves designing lead, lag, and lead-lag compensators using passive elements like resistors and capacitors. The response of the designed system is analyzed using an oscilloscope. The compensators are able to improve the stability and performance of control systems. Some key effects of compensators like changes in gain crossover frequency and phase crossover frequency are demonstrated. Applications include areas like robotics and automobile diagnostics.