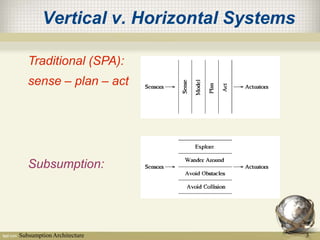
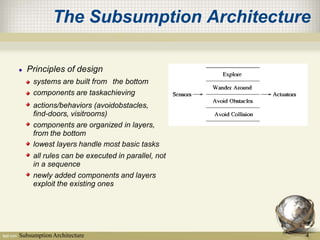
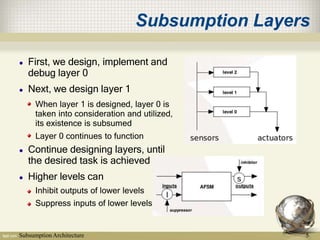
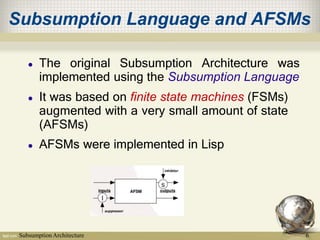
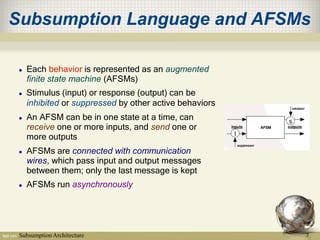
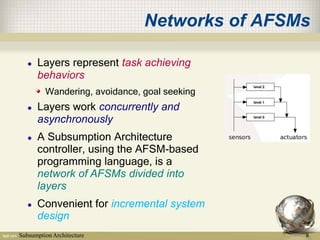
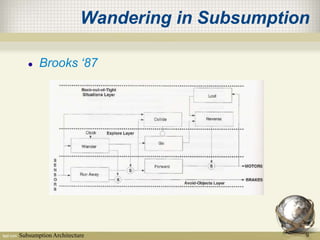
The document provides an overview of subsumption architecture, which is an approach for designing reactive robotic control systems. It describes key principles such as building systems from the bottom up using layered behaviors, with higher layers being able to inhibit or suppress lower layers. Behaviors are implemented as augmented finite state machines. The architecture allows for incremental development and robustness if higher layers fail. Sequencing can occur through world interaction rather than internal communication. The subsumption approach supports modular, incremental design of reactive robotic systems.