Downloaded 13 times
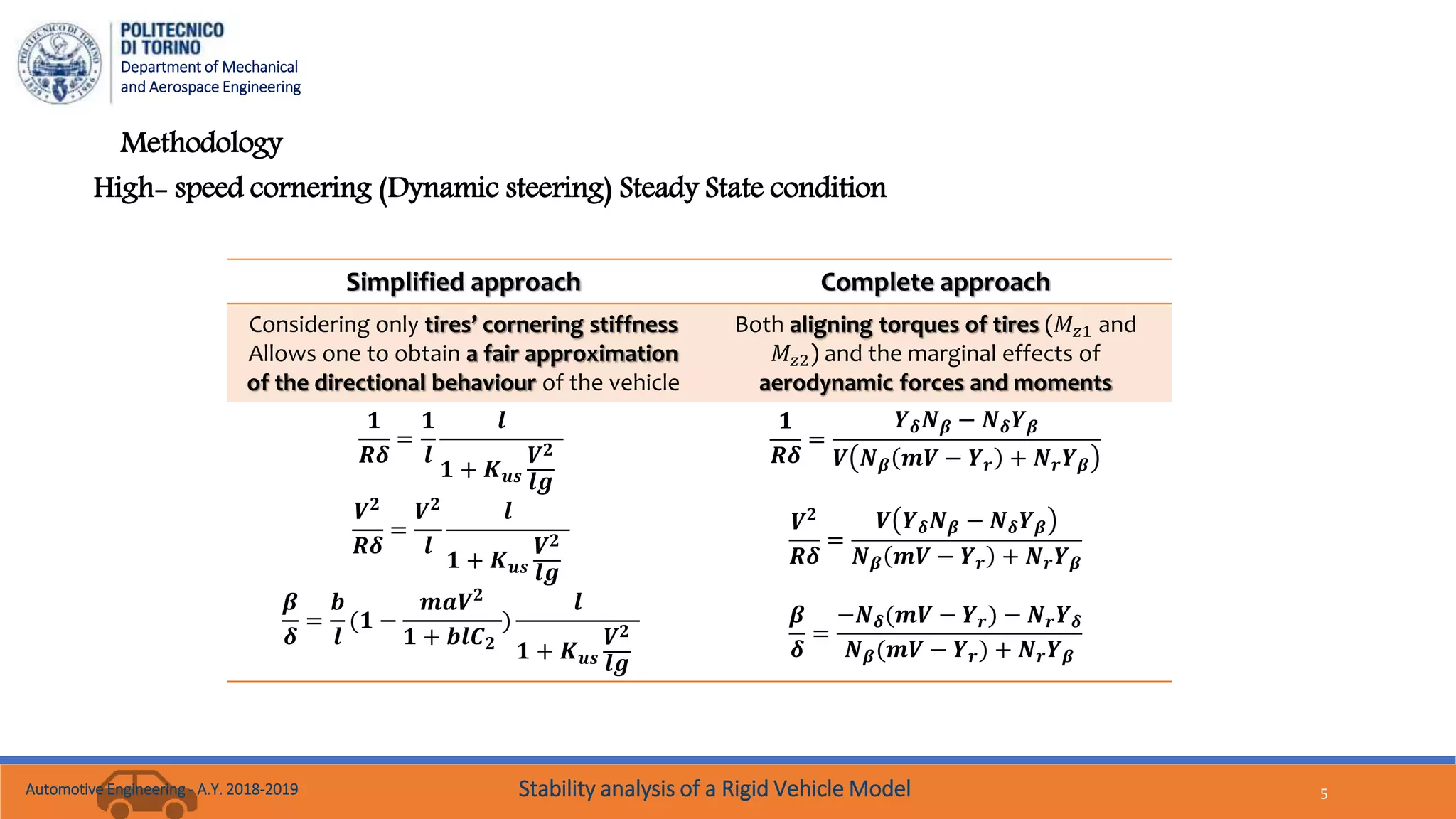
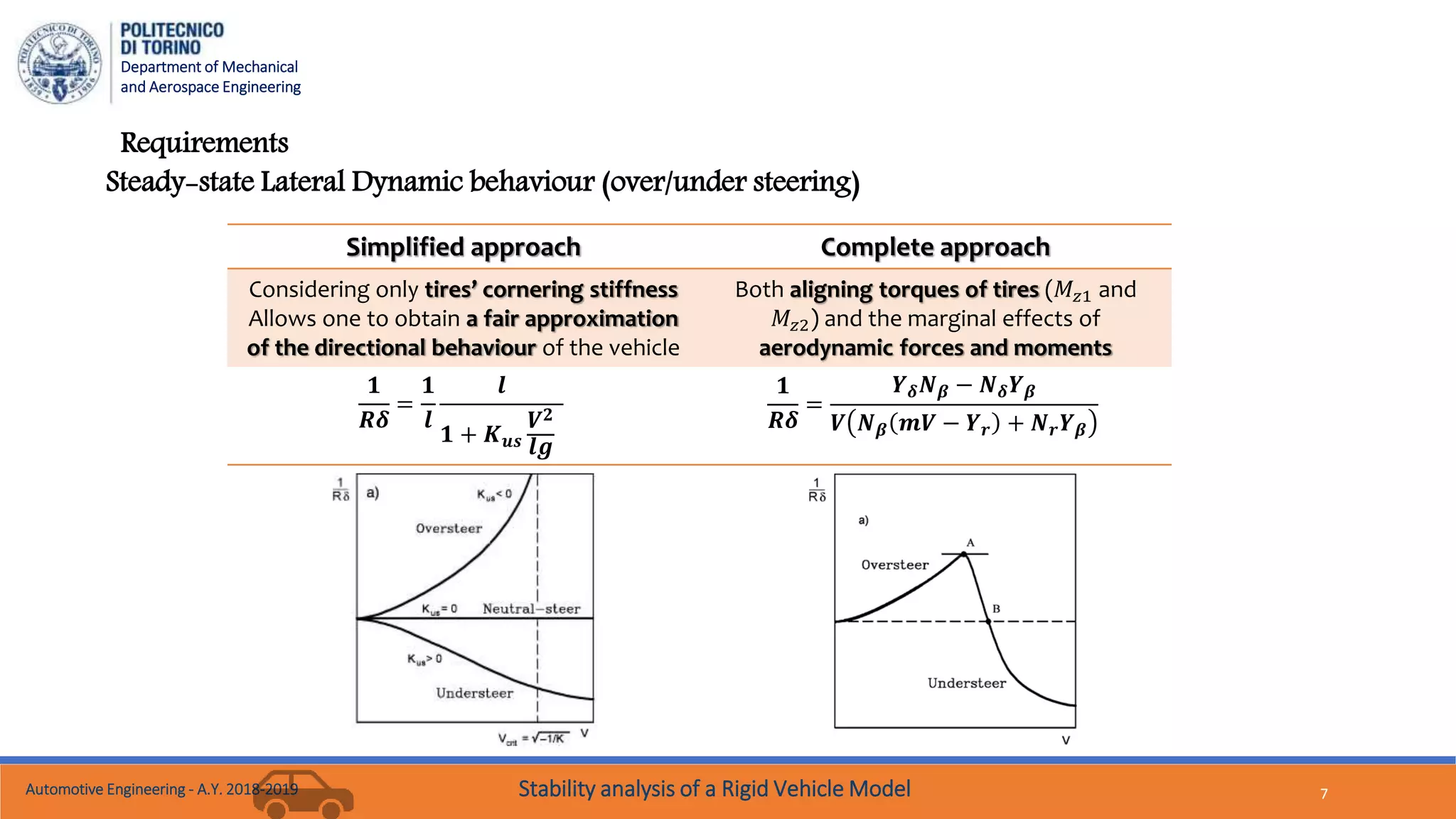
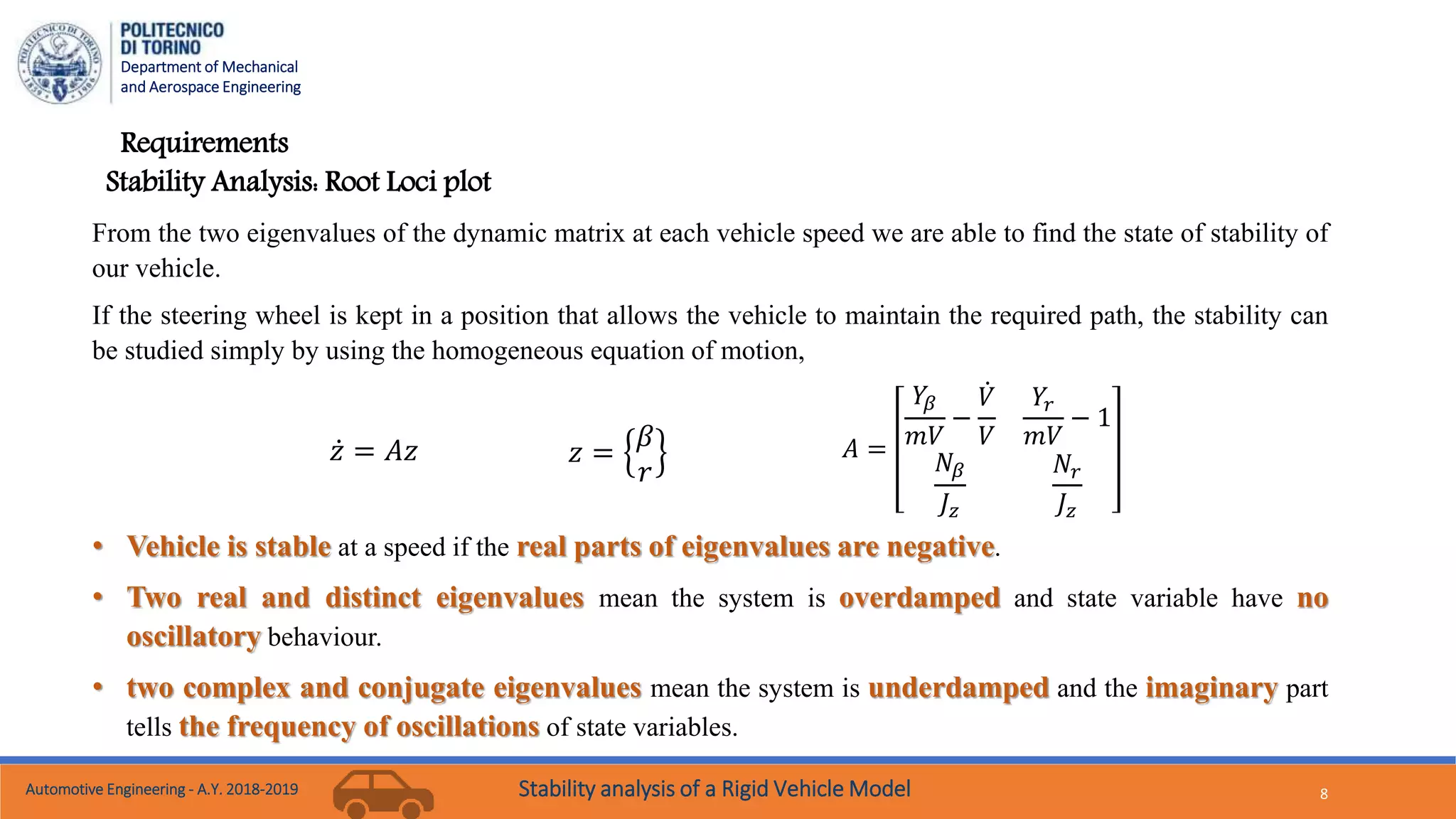

The document presents a methodology for stability analysis of a rigid vehicle model, detailing the characterizations and parameters needed, such as cornering and aligning stiffness. It discusses high-speed cornering dynamics and evaluates the vehicle's lateral dynamic behavior under various traction force conditions and load transfers. The analysis aims to determine the stability of the vehicle through eigenvalue evaluations and plot responses to step steer maneuvers.



































































