Download as PDF, PPTX





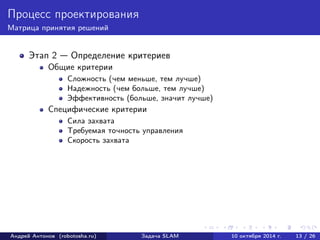
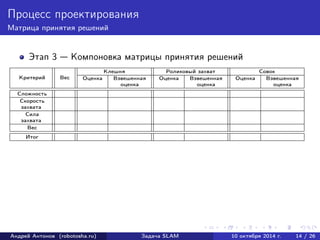
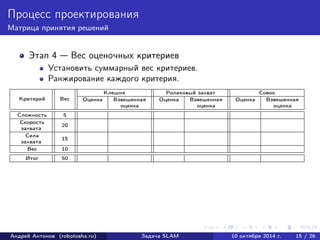
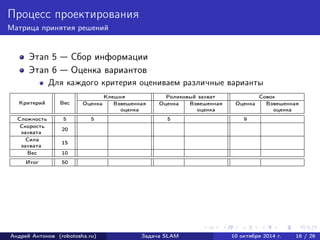
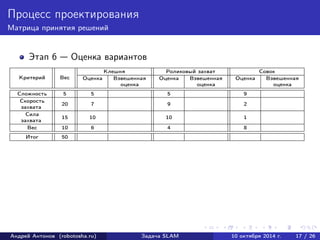
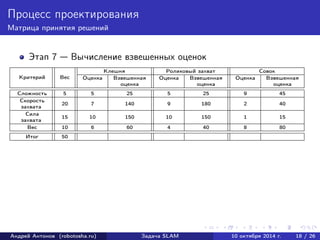
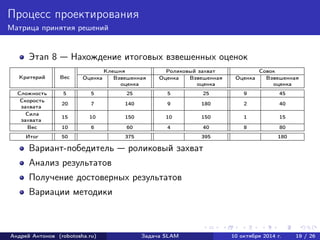
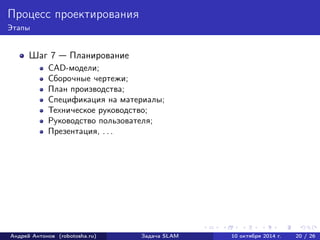
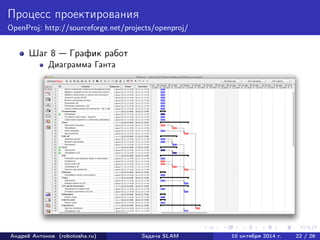

Документ описывает процесс проектирования робота в рамках проекта Roboshkola 2014, выделяя этапы инжиниринга от определения задачи до тестирования и итерации. Включает методики работы, такие как мозговой штурм, создание прототипов и оценка вариантов с использованием матрицы принятия решений. Также рассматриваются критерии и весовые показатели для выбора лучших решений в проектировании.