Download as PDF, PPTX





















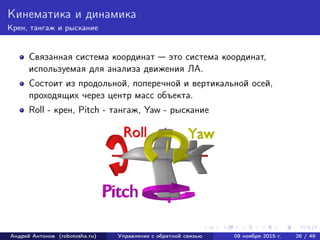





















Документ описывает управление с обратной связью и его применение к квадрокоптерам, охватывая темы кинематики, динамики и различные методы управления, включая ПИД-регулирование и каскадное управление. Обсуждаются проблемы, такие как влияние шумов и временных задержек, а также методы их компенсации. В завершение представлены задачи регулирования и основные принципы работы с управлением в современных системах.



























