Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Saya Katafuchi
2,714 views
第3回長崎デジタルコンテストLT『リバースエンジニアリング入門』
第3回長崎デジタルコンテストで発表したLTスライド. 荒い説明の所があるのでわかりづらい部分があるかもしれません…
Technology
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Downloaded 11 times
1
/ 28
2
/ 28
3
/ 28
4
/ 28
5
/ 28
6
/ 28
7
/ 28
8
/ 28
9
/ 28
10
/ 28
11
/ 28
12
/ 28
13
/ 28
14
/ 28
15
/ 28
16
/ 28
17
/ 28
18
/ 28
19
/ 28
20
/ 28
21
/ 28
22
/ 28
23
/ 28
24
/ 28
25
/ 28
26
/ 28
27
/ 28
28
/ 28
More Related Content
PPTX
[CB16] EXOTIC DATA RECOVERY & PARADAIS by しもがいとだい
by
CODE BLUE
PPTX
Azureで始めるDevOps
by
Atsushi Kojima
PDF
マルウェア解析講座そのいち〜仮想環境下では暴れないけど質問ある?〜
by
Saya Katafuchi
PPTX
第一回バイナリゆるゆる勉強会スライド
by
Ryosuke Shimizu
PPTX
[CB16] IoTとしての自動車とセキュリティ: リモートサービスのセキュリティ評価とその対策の検討 - by 和栗直英
by
CODE BLUE
PDF
Edomae 2015 - マルウェアを解析してみよう
by
Satoshi Mimura
PDF
Microsoft Antimalware for Azure による Azure 仮想マシンの簡易的なマルウェア対策
by
wintechq
PDF
[CB16] Keynote: How much security is too much? by Karsten Nohl
by
CODE BLUE
[CB16] EXOTIC DATA RECOVERY & PARADAIS by しもがいとだい
by
CODE BLUE
Azureで始めるDevOps
by
Atsushi Kojima
マルウェア解析講座そのいち〜仮想環境下では暴れないけど質問ある?〜
by
Saya Katafuchi
第一回バイナリゆるゆる勉強会スライド
by
Ryosuke Shimizu
[CB16] IoTとしての自動車とセキュリティ: リモートサービスのセキュリティ評価とその対策の検討 - by 和栗直英
by
CODE BLUE
Edomae 2015 - マルウェアを解析してみよう
by
Satoshi Mimura
Microsoft Antimalware for Azure による Azure 仮想マシンの簡易的なマルウェア対策
by
wintechq
[CB16] Keynote: How much security is too much? by Karsten Nohl
by
CODE BLUE
More from Saya Katafuchi
PPTX
20190324vvvvオフ会
by
Saya Katafuchi
PDF
VJ Cardboard ブイジェーカードボード
by
Saya Katafuchi
PDF
Handson opencv! 画像処理ライブラリを使って面白いプログラムを作ろう!その2
by
Saya Katafuchi
PDF
Hands On OpenCV! 画像処理ライブラリを使って面白いプログラムを作ろう!
by
Saya Katafuchi
PDF
輪講用資料「Deep Convolutional Network Cascade for Facial Point Detection」
by
Saya Katafuchi
PDF
輪講用資料「Mitosis Detection in Breast Cancer Histology Images with Deep Neural Ne...
by
Saya Katafuchi
PDF
第一回カオス時系列解析
by
Saya Katafuchi
PDF
卒論執筆のために3年生からやる5つのこと
by
Saya Katafuchi
PDF
画像認識のための深層学習
by
Saya Katafuchi
PDF
ディープボルツマンマシン入門
by
Saya Katafuchi
PDF
20140514在校生向けUnity&AR講座
by
Saya Katafuchi
PPTX
20140508 在校生向けUnity&AR講座
by
Saya Katafuchi
PDF
201310合同ゼミ論文紹介
by
Saya Katafuchi
PDF
VirtualDJでPCDJっぽいことをやった
by
Saya Katafuchi
PDF
ヤンデレのUnityに愛されて眠れない〜りたーんず〜
by
Saya Katafuchi
PDF
Capture the flag!
by
Saya Katafuchi
PDF
Tesseract-OCR in iOS
by
Saya Katafuchi
PDF
ヤンデレのUnityに愛されて眠れない〜Unity3分クッキング〜
by
Saya Katafuchi
PDF
Reverseengineering koukai
by
Saya Katafuchi
PPTX
i phoneでbasicやるよ!
by
Saya Katafuchi
20190324vvvvオフ会
by
Saya Katafuchi
VJ Cardboard ブイジェーカードボード
by
Saya Katafuchi
Handson opencv! 画像処理ライブラリを使って面白いプログラムを作ろう!その2
by
Saya Katafuchi
Hands On OpenCV! 画像処理ライブラリを使って面白いプログラムを作ろう!
by
Saya Katafuchi
輪講用資料「Deep Convolutional Network Cascade for Facial Point Detection」
by
Saya Katafuchi
輪講用資料「Mitosis Detection in Breast Cancer Histology Images with Deep Neural Ne...
by
Saya Katafuchi
第一回カオス時系列解析
by
Saya Katafuchi
卒論執筆のために3年生からやる5つのこと
by
Saya Katafuchi
画像認識のための深層学習
by
Saya Katafuchi
ディープボルツマンマシン入門
by
Saya Katafuchi
20140514在校生向けUnity&AR講座
by
Saya Katafuchi
20140508 在校生向けUnity&AR講座
by
Saya Katafuchi
201310合同ゼミ論文紹介
by
Saya Katafuchi
VirtualDJでPCDJっぽいことをやった
by
Saya Katafuchi
ヤンデレのUnityに愛されて眠れない〜りたーんず〜
by
Saya Katafuchi
Capture the flag!
by
Saya Katafuchi
Tesseract-OCR in iOS
by
Saya Katafuchi
ヤンデレのUnityに愛されて眠れない〜Unity3分クッキング〜
by
Saya Katafuchi
Reverseengineering koukai
by
Saya Katafuchi
i phoneでbasicやるよ!
by
Saya Katafuchi
第3回長崎デジタルコンテストLT『リバースエンジニアリング入門』
1.
リバースエンジニアリング入門 ~楽しいバイナリ解析~ 長崎県立大学
国際情報学部 情報メディア学科 片渕 小夜 2014/09/06 1
2.
だれおま 名前:片渕 小夜(かたふち
さや) 年齢:21歳 所属:長崎県立大学国際情報学部情報メ ディア学科4年 進路:来年4月から本学の大学院へ 趣味:プログラミング,TVゲーム Twitter:@reiji1020 2014/09/06 2
3.
ちなみに 2014/09/06 3
4.
2014/09/06 4 (第2回長崎デジタルコンテストHPより)
5.
昨年IPADもらいました 2014/09/06 5
6.
開発機として元気に活躍してます 2014/09/06 6
7.
本題 2014/09/06 7
8.
Q.TV(PC)ゲームしますか? 2014/09/06 8
9.
チート(改造)して遊んだことはありますか? 2014/09/06 9
モンスターハンター4(2013,カプコン)より
10.
自分はあります 2014/09/06 10
11.
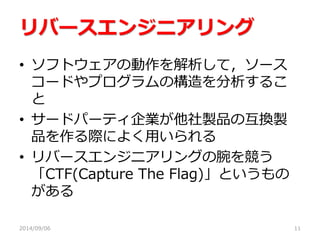
リバースエンジニアリング •ソフトウェアの動作を解析して,ソース コードやプログラムの構造を分析するこ
と •サードパーティ企業が他社製品の互換製 品を作る際によく用いられる •リバースエンジニアリングの腕を競う 「CTF(Capture The Flag)」というもの がある 2014/09/06 11
12.
REできると得すること •ゲームでチートされることを防ぐ –無限ライフ,無限ボム,常に攻撃力MAXなど
–ソフトウェアの脆弱性を見つけ,更に安全性 を高めることが出来る •インターネット上に存在するマルウェア を解析してデータを提供することができ る •コンピュータでソフトウェアが動く仕組 みをより深く理解できる 2014/09/06 12
13.
REでやっちゃいけないこと 利用にライセンスキーが必要なソフトウェ ア(Microsoft
Officeなど)をアクティベート 無しで利用できるように改造することなど 2014/09/06 13 絶対にやらないでね!
14.
REを始める際に必要なもの •アセンブラ(機械語)に関する最低限の知識 •Windows7or8の入ったPC
•やる気(←超重要) 2014/09/06 14
15.
??? 2014/09/06 15
オレたちハッカーは普通のウィ ンドウズみたいなGUIでPCを 扱うことはほとんど無い 初歩的なスクリプト言語から FortranだのCOBOLだのの高 度なプログラミング言語まで駆 使して端末を動かしたりネット ワークに侵入してコントロール したり… (ブラッディ・マンデイ 6巻 高 木藤丸)
16.
??? 2014/09/06 16
オレたちハッカーは普通のウィ ンドウズみたいなGUIでPCを 扱うことはほとんど無い 初歩的なスクリプト言語から FortranだのCOBOLだのの高 度なプログラミング言語まで駆 使して端末を動かしたりネット ワークに侵入してコントロール したり… (ブラッディ・マンデイ 6巻 高 木藤丸)
17.
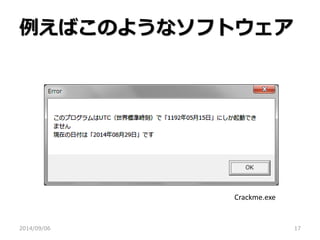
例えばこのようなソフトウェア 2014/09/06 17
Crackme.exe
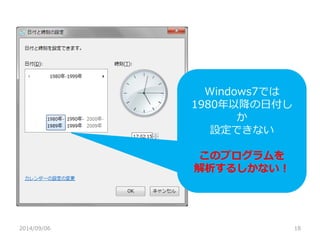
18.
2014/09/06 18 Windows7では
1980年以降の日付し か 設定できない このプログラムを 解析するしかない!
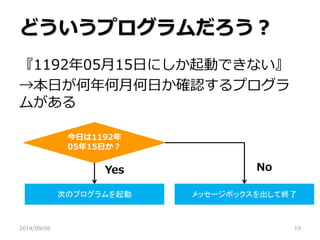
19.
どういうプログラムだろう? 『1192年05月15日にしか起動できない』 →本日が何年何月何日か確認するプログラ
ムがある 2014/09/06 19 今日は1192年 05年15日か? 次のプログラムを起動 メッセージボックスを出して終了 Yes No
20.
Ollydbg •デバッガのひとつ •フリーで使えるプログラム解析の強い味方
•基本英語だが有志による日本語化パッチも配布 されている 2014/09/06 20
21.
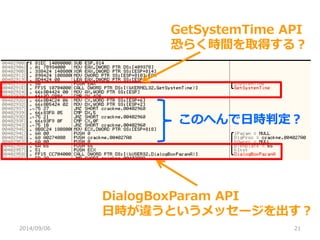
2014/09/06 21 GetSystemTime
API 恐らく時間を取得する? DialogBoxParam API 日時が違うというメッセージを出す? このへんで日時判定?
22.
2014/09/06 22 JNZ命令:指定のアドレスにジャンプ(00402960へ)
CMP命令:レジスタの中の数値と指定の数値を比較 ※00402960にはエラーメッセージを表示する処理が書かれています エラーメッセージを表示する命令にジャンプするようになっているので… このJNZ命令を何もしない命令「NOP命令」に 書き換えることで条件をクリアする!
23.
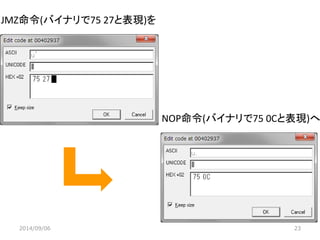
2014/09/06 23 JMZ命令(バイナリで75
27と表現)を NOP命令(バイナリで75 0Cと表現)へ
24.
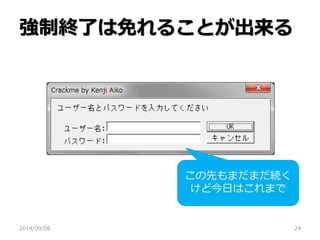
強制終了は免れることが出来る 2014/09/06 24
この先もまだまだ続く けど今日はこれまで
25.
どうでしょうか? 2014/09/06 25
26.
少し難しかったでしょうか? 2014/09/06 26
27.
とりあえず言いたいこと •何気なく使用していたソフトウェアの中身を 覗くことで,似たようなプログラムを作る時
に応用することが出来る •コンピュータやソフトウェアの最小単位は “バイナリ”である •アセンブラの勉強は今からでもでき,リバー スエンジニアリングの勉強も今からできる 2014/09/06 27
28.
参考書籍&おすすめ書籍 •『たのしいバイナリの歩き方』(技術評論社) •『リバースエンジニアリング
Pythonによる バイナリ解析手法』(オライリー・ジャパン) •『アナライジング・マルウェア フリーツー ルを使った感染事案対処』(オライリー・ ジャパン) •『アセンブリ言語の教科書』(データハウス) 2014/09/06 28
Download






![[CB16] EXOTIC DATA RECOVERY & PARADAIS by しもがいとだい](https://cdn.slidesharecdn.com/ss_thumbnails/cb16shimogaitoja-161108080907-thumbnail.jpg?width=640&height=640&fit=bounds)



![[CB16] IoTとしての自動車とセキュリティ: リモートサービスのセキュリティ評価とその対策の検討 - by 和栗直英](https://cdn.slidesharecdn.com/ss_thumbnails/cb16wagurija-161109051322-thumbnail.jpg?width=640&height=640&fit=bounds)


![[CB16] Keynote: How much security is too much? by Karsten Nohl](https://cdn.slidesharecdn.com/ss_thumbnails/cb16nohlen-161109051435-thumbnail.jpg?width=640&height=640&fit=bounds)