Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Hiro Yoshioka
PPT, PDF
830 views
カーネル読書会の作り方@ライブドア
勉強会の生み出す価値をカーネル読書会を例に議論する。勉強会の意義、それを社内へ持ってくる意義。
Technology
◦
News & Politics
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Downloaded 11 times
1
/ 23
2
/ 23
3
/ 23
4
/ 23
5
/ 23
6
/ 23
7
/ 23
8
/ 23
9
/ 23
10
/ 23
11
/ 23
12
/ 23
13
/ 23
14
/ 23
15
/ 23
16
/ 23
17
/ 23
18
/ 23
19
/ 23
20
/ 23
21
/ 23
22
/ 23
23
/ 23
More Related Content
PPTX
トークイベントいろいろ
by
高見 知英
PDF
楽天の中のわたしと勉強会
by
Rakuten Group, Inc.
PDF
自治体 東京事務所 訪問の中間報告
by
Katsuhito Okada
PDF
Groongaドキュメント読書会1の進め方
by
Kouhei Sutou
PPT
CA Japan seminar mainframe2.0 2011/10/26
by
Kaneko Izumi
PDF
楽天エンジニアライフ
by
Rakuten Group, Inc.
PDF
第100回カーネル読書会の作り方
by
Hiro Yoshioka
PDF
カーネル読書会の作り方 1000 speakers conference, 2/23/'08
by
Hiro Yoshioka
トークイベントいろいろ
by
高見 知英
楽天の中のわたしと勉強会
by
Rakuten Group, Inc.
自治体 東京事務所 訪問の中間報告
by
Katsuhito Okada
Groongaドキュメント読書会1の進め方
by
Kouhei Sutou
CA Japan seminar mainframe2.0 2011/10/26
by
Kaneko Izumi
楽天エンジニアライフ
by
Rakuten Group, Inc.
第100回カーネル読書会の作り方
by
Hiro Yoshioka
カーネル読書会の作り方 1000 speakers conference, 2/23/'08
by
Hiro Yoshioka
Similar to カーネル読書会の作り方@ライブドア
PDF
ハッカー中心の企業文化を日本で根付かせるには。TechLION vol.5 12/14/2011
by
Hiro Yoshioka
PDF
社内Twitter研究会、by 勉強会同好会 110426
by
Hiro Yoshioka
PDF
勉強会カンファレンス2011、企業と勉強会
by
Hiro Yoshioka
PDF
Opensource and Value creation by community
by
Hiro Yoshioka
PDF
[18-A-1] ハッカー中心の企業文化を日本で根付かせる
by
Hiro Yoshioka
PDF
Hacker centric culture @devlove 110423
by
Hiro Yoshioka
PDF
Progcamp internet 100801
by
Hiro Yoshioka
PDF
Internet and Opensource at Security and Programming camp 2011
by
Hiro Yoshioka
ODP
Sapporo Open Seminar
by
Hiro Yoshioka
ODP
Sapporo Open Seminar
by
Hiro Yoshioka
PPT
情熱プログラマー Passionate programmer100428
by
Hiro Yoshioka
PDF
Building Hacker Centric Culture in Japan
by
Hiro Yoshioka
ODP
Sapporo Open Seminar 2
by
Hiro Yoshioka
PDF
Progcamp studygroup 100814
by
Hiro Yoshioka
ODP
Comment for the JCSS workshop in Sep. 14. 2013
by
真行 八田
PDF
勉強会旅人のススメ
by
and hyphen
PDF
サーバーだけじゃない!Linux デスクトップを使い倒そう その3 ― 今話題の Kotlin から Ruby、C++ 1x…の開発環境を整える
by
Fuminobu Takeyama
ODP
Sapporo Open Seminar 1
by
Hiro Yoshioka
PDF
いわみくとMeetup第15回
by
Satomi Tsujita
PDF
勉強会カンファレンス2012
by
Hiro Yoshioka
ハッカー中心の企業文化を日本で根付かせるには。TechLION vol.5 12/14/2011
by
Hiro Yoshioka
社内Twitter研究会、by 勉強会同好会 110426
by
Hiro Yoshioka
勉強会カンファレンス2011、企業と勉強会
by
Hiro Yoshioka
Opensource and Value creation by community
by
Hiro Yoshioka
[18-A-1] ハッカー中心の企業文化を日本で根付かせる
by
Hiro Yoshioka
Hacker centric culture @devlove 110423
by
Hiro Yoshioka
Progcamp internet 100801
by
Hiro Yoshioka
Internet and Opensource at Security and Programming camp 2011
by
Hiro Yoshioka
Sapporo Open Seminar
by
Hiro Yoshioka
Sapporo Open Seminar
by
Hiro Yoshioka
情熱プログラマー Passionate programmer100428
by
Hiro Yoshioka
Building Hacker Centric Culture in Japan
by
Hiro Yoshioka
Sapporo Open Seminar 2
by
Hiro Yoshioka
Progcamp studygroup 100814
by
Hiro Yoshioka
Comment for the JCSS workshop in Sep. 14. 2013
by
真行 八田
勉強会旅人のススメ
by
and hyphen
サーバーだけじゃない!Linux デスクトップを使い倒そう その3 ― 今話題の Kotlin から Ruby、C++ 1x…の開発環境を整える
by
Fuminobu Takeyama
Sapporo Open Seminar 1
by
Hiro Yoshioka
いわみくとMeetup第15回
by
Satomi Tsujita
勉強会カンファレンス2012
by
Hiro Yoshioka
More from Hiro Yoshioka
PDF
Infra study 2nd #1 人生100年時代の学び方,定年後の大学院生活
by
Hiro Yoshioka
PDF
Infra study 2nd #1「インフラ技術者・研究者としてのキャリア」
by
Hiro Yoshioka
PDF
不揮発性メモリ(NVM)とはなにか
by
Hiro Yoshioka
PDF
続・人生100年時代の学び方
by
Hiro Yoshioka
PDF
人生100年時代における学び方 定年後の学生生活
by
Hiro Yoshioka
PDF
Thesis introduction "RECIPE : Converting Concurrent DRAM Indexes to Persisten...
by
Hiro Yoshioka
PDF
人生100年時代の学び方、脳には可塑性がある
by
Hiro Yoshioka
PDF
エンジニア人生と定年退職、人生100年時代のエンジニアの生き方、「私のような仕事につく方法」、2019/06/23 DevLOVE X Day 1 D-7
by
Hiro Yoshioka
PDF
OSSとの付き合い方。OSSから学んだこと。OSS貢献者賞受賞講演
by
Hiro Yoshioka
PDF
エンジニア人生と定年退職、人生100年時代のエンジニアの生き方、デブサミ 2019 【15-A-8】
by
Hiro Yoshioka
PDF
未経験プログラマがコボルコンパイラを作った話 #compiler_study
by
Hiro Yoshioka
PDF
Godel, Escher, Bach: an Eternal Golden Braid, reading club, Chapter 12
by
Hiro Yoshioka
PDF
海外から見た東京 〜人生100年時代の働き方〜 #efsta56
by
Hiro Yoshioka
PDF
理科系の作文技術
by
Hiro Yoshioka
PDF
Agile Software Development advanced course (PBL) at AIIT, 2015
by
Hiro Yoshioka
PDF
質問される力 #TechGirls
by
Hiro Yoshioka
PDF
Oracle vs Google API 著作権裁判を考える
by
Hiro Yoshioka
PDF
Using oss at an internet company and hacker culture
by
Hiro Yoshioka
PDF
Be Hacker
by
Hiro Yoshioka
PDF
Project Based Learning using by PaaS
by
Hiro Yoshioka
Infra study 2nd #1 人生100年時代の学び方,定年後の大学院生活
by
Hiro Yoshioka
Infra study 2nd #1「インフラ技術者・研究者としてのキャリア」
by
Hiro Yoshioka
不揮発性メモリ(NVM)とはなにか
by
Hiro Yoshioka
続・人生100年時代の学び方
by
Hiro Yoshioka
人生100年時代における学び方 定年後の学生生活
by
Hiro Yoshioka
Thesis introduction "RECIPE : Converting Concurrent DRAM Indexes to Persisten...
by
Hiro Yoshioka
人生100年時代の学び方、脳には可塑性がある
by
Hiro Yoshioka
エンジニア人生と定年退職、人生100年時代のエンジニアの生き方、「私のような仕事につく方法」、2019/06/23 DevLOVE X Day 1 D-7
by
Hiro Yoshioka
OSSとの付き合い方。OSSから学んだこと。OSS貢献者賞受賞講演
by
Hiro Yoshioka
エンジニア人生と定年退職、人生100年時代のエンジニアの生き方、デブサミ 2019 【15-A-8】
by
Hiro Yoshioka
未経験プログラマがコボルコンパイラを作った話 #compiler_study
by
Hiro Yoshioka
Godel, Escher, Bach: an Eternal Golden Braid, reading club, Chapter 12
by
Hiro Yoshioka
海外から見た東京 〜人生100年時代の働き方〜 #efsta56
by
Hiro Yoshioka
理科系の作文技術
by
Hiro Yoshioka
Agile Software Development advanced course (PBL) at AIIT, 2015
by
Hiro Yoshioka
質問される力 #TechGirls
by
Hiro Yoshioka
Oracle vs Google API 著作権裁判を考える
by
Hiro Yoshioka
Using oss at an internet company and hacker culture
by
Hiro Yoshioka
Be Hacker
by
Hiro Yoshioka
Project Based Learning using by PaaS
by
Hiro Yoshioka
カーネル読書会の作り方@ライブドア
1.
カーネル読書会の作り方 @ライブドア 楽天株式会社
開発部 よしおかひろたか| 2009 年 12 月 4 日
2.
本日のお話 自己紹介 カーネル読書会の作り方
勉強会のチカラ
3.
自己紹介 よしおかひろたか (@hyoshiok)
楽天株式会社 開発部 カーネル読書会主宰 DEBUG HACKS 著者、 ISBN978-4-87311-404-0 セキュリティ&プログラミングキャンプ プログラミング部門主査 http://d.hatena.ne.jp/hyoshiok http://twitter.com/hyoshiok
4.
で、開発者の皆様
5.
そこで、最近コードを書いていない プログラマーからみた カーネル読書会の作り方と
勉強会のチカラ
6.
勉強会の隆盛 300 件
/ 月以上開催 id:hanazukin と愉快な仲間達による人力作業によって編集公開されている。 IT 勉強会カレンダー
7.
勉強会のイメージ 主催者が個人的興味の延長で開催 ボランティアによって運営
無償ないしは廉価 商用セミナー、教育コースとの違い 技術者の人的ネットワーク、知識獲得のプラットフォーム、キャリア形成のツール
8.
カーネル読書会 Linux およびオープンソース技術に関する勉強会
1999 年 4 月から。10年続いている。 第 100 回開催した。 Linus も参加してくれた。 中学生から 50 代まで、 素人からカーネルハッカー まで、毎回数十人参加 よしおかが主宰。横浜 Linux Users Group (YLUG) 有志と運営 http://ylug.jp
9.
カーネル読書会 Linux や
OSS に関する技術的な 話題を扱う勉強会。 10 年間、 100 回続いている 第 100 回、 Linus さんや世界中のカーネルハッカーも参加してくれた。うれしい。 http://itpro.nikkeibp.co.jp/article/NEWS/20091023/339312/
10.
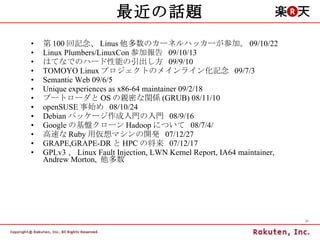
最近の話題 第 100
回記念、 Linus 他多数のカーネルハッカーが参加。 09/10/22 Linux Plumbers/LinuxCon 参加報告 09/10/13 はてなでのハード性能の引出し方 09/9/10 TOMOYO Linux プロジェクトのメインライン化記念 09/7/3 Semantic Web 09/6/5 Unique experiences as x86-64 maintainer 09/2/18 ブートローダと OS の親密な関係 (GRUB) 08/11/10 openSUSE 事始め 08/10/24 Debian パッケージ作成入門の入門 08/9/16 Google の基盤クローン Hadoop について 08/7/4/ 高速な Ruby 用仮想マシンの開発 07/12/27 GRAPE,GRAPE-DR と HPC の将来 07/12/17 GPLv3 、 Linux Fault Injection, LWN Kernel Report, IA64 maintainer, Andrew Morton, 他多数
11.
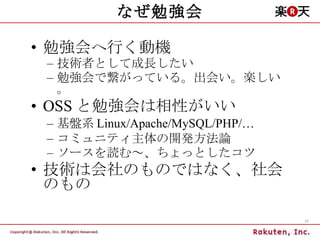
なぜ勉強会 勉強会へ行く動機 技術者として成長したい
勉強会で繋がっている。出会い。楽しい。 OSS と勉強会は相性がいい 基盤系 Linux/Apache/MySQL/PHP/… コミュニティ主体の開発方法論 ソースを読む~、ちょっとしたコツ 技術は会社のものではなく、社会のもの
12.
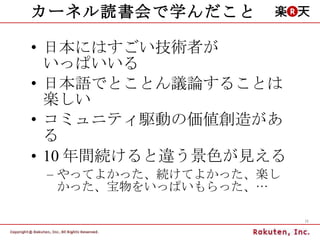
カーネル読書会で学んだこと 日本にはすごい技術者が いっぱいいる
日本語でとことん議論することは楽しい コミュニティ駆動の価値創造がある 10 年間続けると違う景色が見える やってよかった、続けてよかった、楽しかった、宝物をいっぱいもらった、…
13.
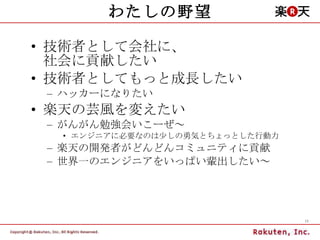
わたしの野望 技術者として会社に、 社会に貢献したい
技術者としてもっと成長したい ハッカーになりたい 楽天の芸風を変えたい がんがん勉強会いこーぜ~ エンジニアに必要なのは少しの勇気とちょっとした行動力 楽天の開発者がどんどんコミュニティに貢献 世界一のエンジニアをいっぱい輩出したい~
14.
組織の限界 組織が肥大化すると 蛸壺(他の事業部なにする人ぞ)
横串(クロスファンクション)は言うほど簡単ではない 文化の融合が必要、対立ではなく 商用ソフトvsオープンソース 外注vs自作 ウォーターフォールvsアジャイル レガシーvs Web2.0 高い稼働率vsスケーラビリティ スケールアップvsスケールアウト そこで、社内コミュニティ
15.
社内コミュニティ コミュニティ・オブ・プラクティス 組織:縦割り
プロジェクト:横串 社内コミュニティ:縦でも横でもない 志を共有するメンバーによってドライブ コミュニティは組織を活性化するビタミン 例 楽天テクノロジーカンファレンス実行委員会 勉強会 ジャングル(開発コミュニティ) ランチミーティング
16.
カーネル読書会を社内で開催 中途入社の人間がカーネル読書会を社内で開催した 大変だったこと
申請書類がいっぱい。(空調、ゲストカード、イベント申請、エレベータ、会場、開錠…) 社内ワークフロー、誰に何を頼めばいいかわからない うれしかったこと ボランティアがいっぱい立候補してくれた(多分 10 人以上) 楽天カーネル隊を結成♪ 社内ワークフローとか、教えてくれる人がいた エライ人が理解を示してくれた(社内スポンサー) ビアバッシュ(ピザとビールのパーティ)ができた
17.
カーネル読書会@楽天 社外勉強会を社内でやると… メリット(社員にとって、会社にとって)
自社での開催なので、参加の敷居が低い。最新技術動向の入手。議論の場の提供。外部からの刺激による開発者の活性化。モチベーションアップ。外部人材との交流。企業イメージ向上。 リスク、コスト 情報流出⇒会場以外には入れない 会場提供⇒直接的な費用はほとんど発生しない 勤務時間外⇒コストはほとんどかからない メリット>コスト(よしおかの勉強会の第一法則)
18.
技術者として オープンイノベーションの時代 オープンソースのテクノロジは外部にある
社外に価値の源泉を求めざるをえない 会社に閉じこもっていてはいけない コミュニティ的なノリ 技術は会社のものではない、社会のものだ 社会をよくしていくという価値観
19.
日本には Google や
Amazon のような Web2.0 の覇者はいない Mixi, Gree, DeNA, PFI, ライブドア、はてな、ドワンゴ、楽天、…、 Web 企業はある それぞれの会社の技術者は勉強会で繋がっている 価値観を共有している オープンイノベーションによる産業構造の変化、価値創造エンジン⇒勉強会がある
20.
わたしたちは価値観を共有している 4 Gbps
を超える Web サービス構築術 インターネットは、その起源において、自由であり、公平であり、そして利用者のためのネットワークでした。中略。 インターネットの世界でビジネスを展開する事業者にとって、インターネットの可能性を信じるということと、技術情報をオープンにし、共有するということは同義であるともいえます。中略。われわれは今もなお、インターネットの可能性を信じています。本書がその証拠です。 監修者のことば、 2009 年 7 月、伊勢幸一
21.
で、開発者の皆様
22.
開発者のみなさん 解ける問題ではなく、解くべき問題を解こう *
我々には解くべき問題がいっぱいある それは、コミュニティの問題でもある 勉強会でそれを共有しよう 世界を一緒に目指そう *)学生を成功に導くアドバイス http://leoclock.blogspot.com/2009/04/ullman.html
23.
Q&A
Download















![[18-A-1] ハッカー中心の企業文化を日本で根付かせる](https://cdn.slidesharecdn.com/ss_thumbnails/hackercentricculturefinal-110218211147-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


































