RAMSES: Robust Analytic Models for Science at Extreme Scales
SROP_Poster
1. A REVIEW OF 2D/3D MAPPING
Charles Njoroge1, Odest Chadwicke Jenkins2
1Department of Computer Science and Engineering, University of Michigan 2260 Hayward St.,
Ann Arbor, MI 48109-2121
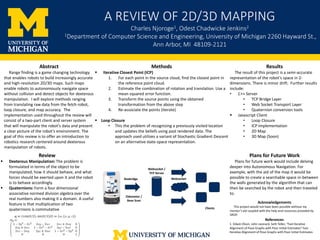
Methods
§ Iterative Closest Point (ICP)
1. For each point in the source cloud, find the closest point in
the reference point cloud.
2. Estimate the combination of rotation and translation. Use a
mean squared error function.
3. Transform the source points using the obtained
transformation from the above step
4. Re-associate the points (iterate)
§ Loop Closure
• This the problem of recognizing a previously visited location
and updates the beliefs using past rendered data. The
approach used utilizes a variant of Stochastic Gradient Descent
on an alternative state-space representation.
Results
The result of this project is a semi-accurate
representation of the robot’s space in 2-
dimensions. There is minor drift. Further results
include:
• C++ Server
• TCP Bridge Layer
• Web Socket Transport Layer
• Quaternion conversion tools
§ Javascript Client
• Loop Closure
• ICP Implementation
• 2D Map
• 3D Map (Soon)
Abstract
Range finding is a game changing technology
that enables robots to build increasingly accurate
and high-resolution 2D/3D maps. Such maps
enable robots to autonomously navigate space
without collision and detect objects for dexterous
manipulation. I will explore methods ranging
from translating raw data from the fetch robot,
loop closure, and map accuracy. The
implementation used throughout the review will
consist of a two-part client and server system
that will manipulate the robot’s data and present
a clear picture of the robot’s environment. The
goal of this review is to offer an introduction to
robotics research centered around dexterous
manipulation of robots.
Review
§ Dexterous Manipulation: The problem is
formulated in terms of the object to be
manipulated, how it should behave, and what
forces should be exerted upon it and the robot
is to behave accordingly.
§ Quaternions: Form a four dimensional
associative normed division algebra over the
real numbers also making it a domain. A useful
feature is that multiplication of two
quaternions is commutative
Plans for Future Work
Plans for future work would include delving
deeper into Autonomous Navigation. For
example, with the aid of the map it would be
possible to create a searchable space in-between
the walls generated by the algorithm that can
then be searched by the robot and then traveled
to.
Acknowledgements
This project would not have been possible without my
mentor’s aid coupled with the help and resources provided by
SROP.
Odometer /
Base Scan
Clients
Websocket
Websocket /
TCP Server
Rosbridge
References
1. Edwin Olson, John Leonard, Seth Teller, “Fast Iterative
Alignment of Pose Graphs with Poor Initial Estimates” Fast
Iterative Alignment of Pose Graphs with Poor Initial Estimates